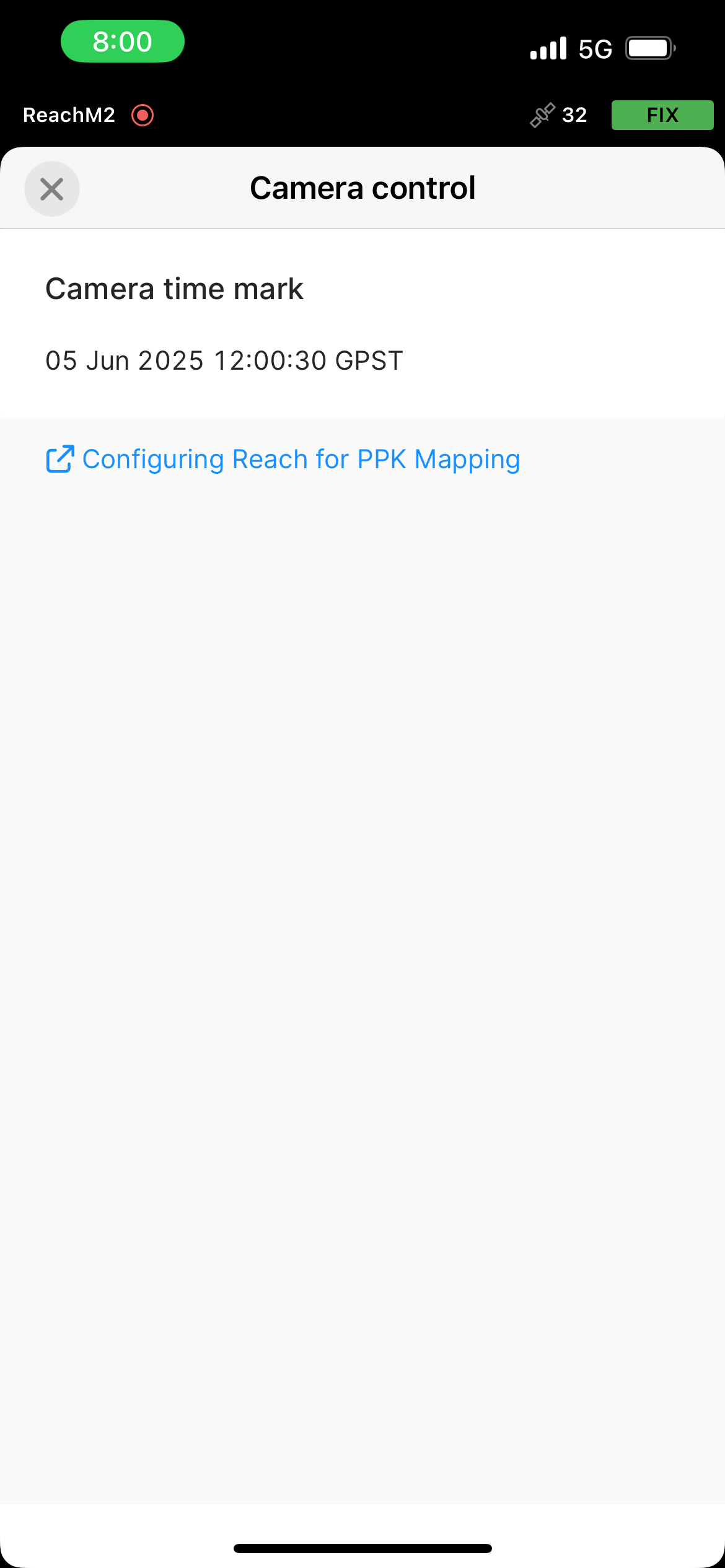
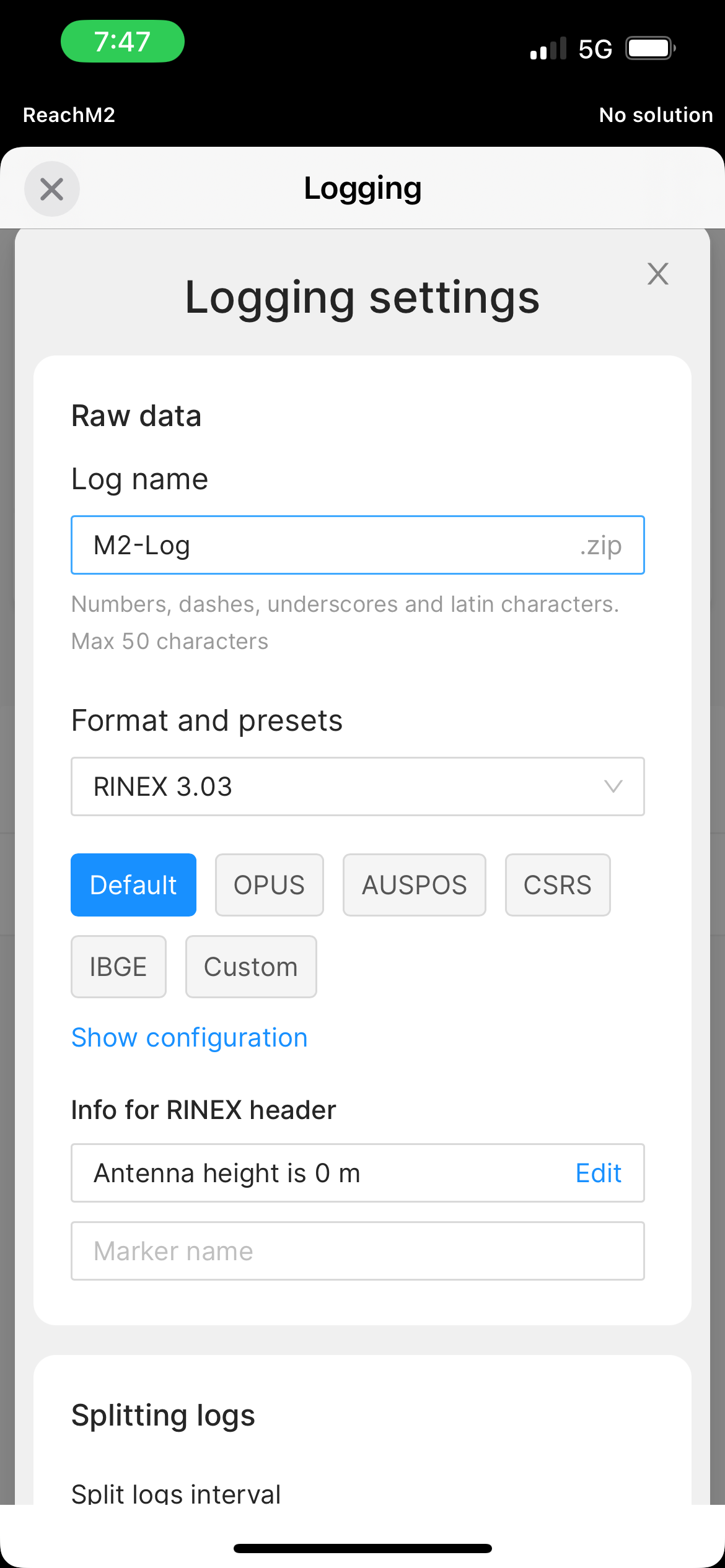
I am trying to geotag photos taken with a Sony A7R III using a M2 and hot shoe adapter. The M2 is set to use NTRIP to get RTK from a CORS network. The M2 receives corrections from the NTRIP and gets a fix. Photos are taken manually using the camera trigger. The trigger event shows up in Emlid Flow Camera control as a Camera time mark. I cannot find the event triggers in the LLH log file. Not sure if I am missing something.
Camera Setup

Sony A7R III
Reach M2/M+ camera hot shoe adapter
Reach M2/M+ SMA antenna adapter cable 0.5m
Reach M2 Multi-band RTK GNSS receiver
Reach M2 Multi-band GNSS antenna
External Power
Camera time marker