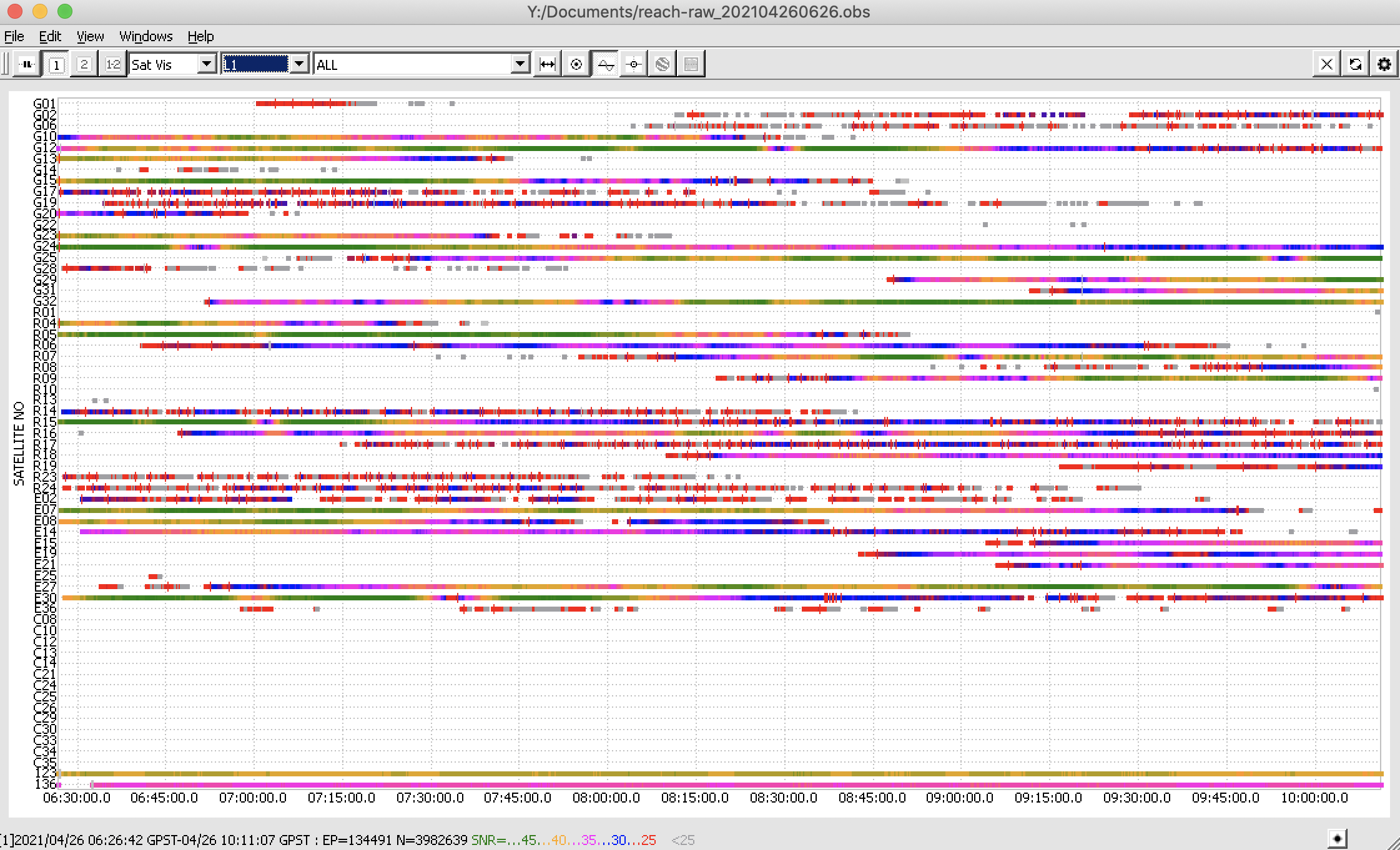
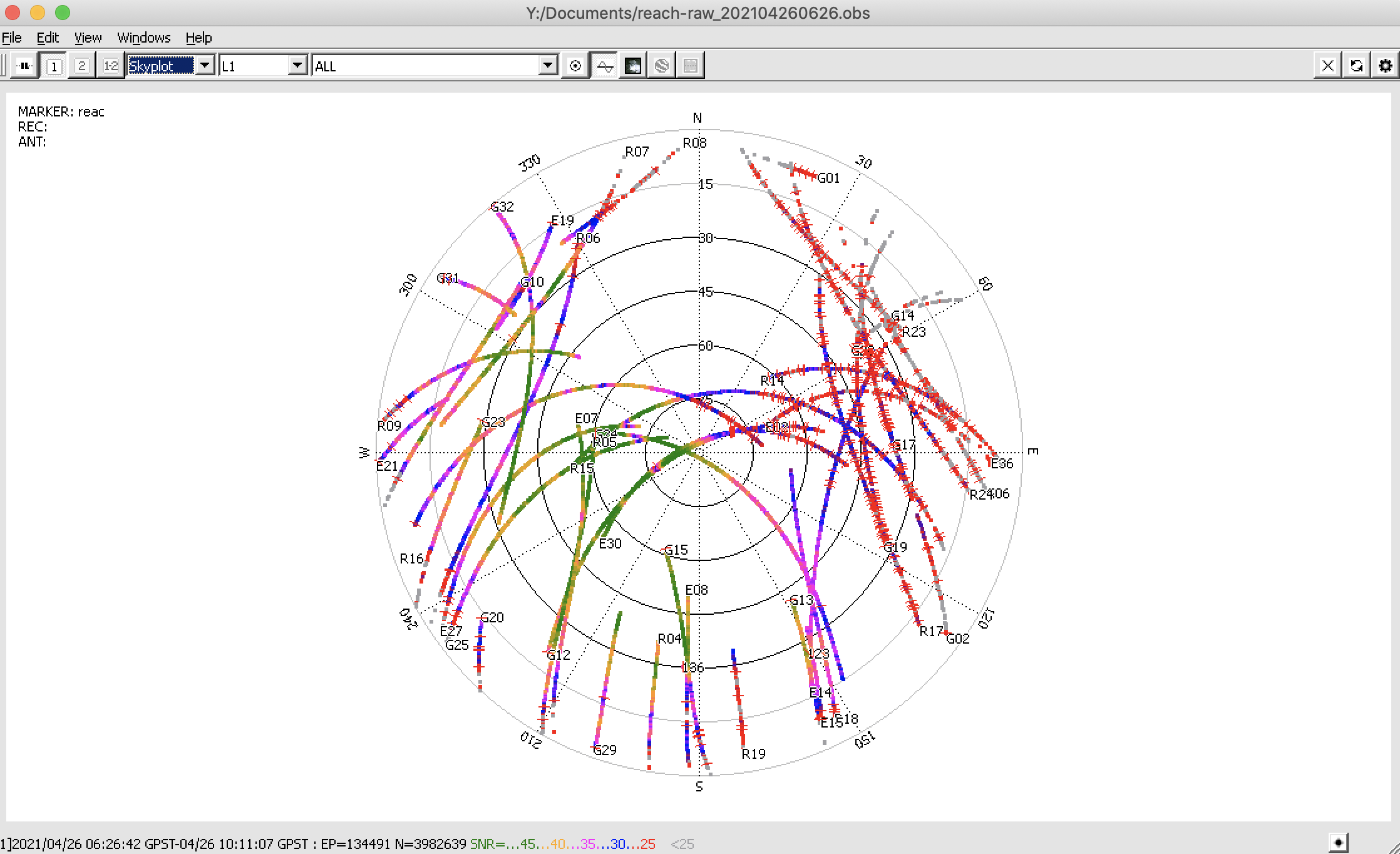
I have a problem with the Reach M2 that I can’t explain at all. I register postprocessing data with a resolution of 10 Hz. The receiver is not moved, the batteries are full, the temperature is rather cold. Nevertheless, I noticed gaps in the recording. There, over an area of almost 3 minutes, the graphic shows that only L5 data is received, see picture 1. There was no shadowing, the receiver was not moved. On picture 2 you can see the signal-to-noise ratios. I can’t explain this graphic at all. With rtklib, no fix can be calculated for this area either.
These screenshots look indeed weird. Is there any chance you could provide these logs? It will help me to understand the issue fully and provide some explanation.
If the logs contain sensitive info, you can email us at support@emlid.com with them.
I have now found out that the satellite data (observations) are OK. It is due to the navigation data, these are incompletely downloaded from the Reach!?
I am not entirely sure, however
If I download the same timeperiod from the German Sapos station and then use this navigation data, the gaps are already smaller and points are also calculated with fixed.
You can take a look at the data and tell me what you think of it.
I checked the log you provided. There are numerous cycle slips, so it looks like the sky view was partially obstructed. However, I don’t see any gaps. Could you please tell me in which data you got gaps?
As I can see, you attached 1 raw data log only. To get the position in Fix, you will need to process base and rover data together. Is there a chance that you can share a base data log for the same time period? Also, please clarify if you processed the data in our version of RTKLib.
I mean the gaps, which can be seen very clearly in the attached pictures in the 1st thread between 8:24:00 and 08:26:45. The entire observations are shown in gray.
According to the legend from RTKLIB, only L5 are received in this area.
In another report I read that there is no nav data for this area. Can you confirm it?
I mean these gaps, which are shown in gray. I use the “original” Rtklib version 33f.
-How does your rtklib differ from the “original” rtklib?
Reach M2 doesn’t track L5 frequency for GPS and GLONASS. It tracks E5b for Galileo, but these signals are not presented as L5 in RTKLib. However, RTKLib may show the signal’s track in grey if the satellite is quite close to the horizon. We’ll fix that in future versions of our post-processing software.
When I converted the UBX file you provided to RINEX, I got the OBS and NAV files. The NAV file is not empty and looks fine.
There are no gaps in the OBS data opened in our version of RTKPlot. I can see some cycle slips, but it looks like they were caused by the partially obstructed sky view.
Please try to process the data in our version of RTKLib and check if the issue persists. We modified and optimized this version to work with our receivers, so you should face no issues with it.




{kind=link}
{kind=link}