



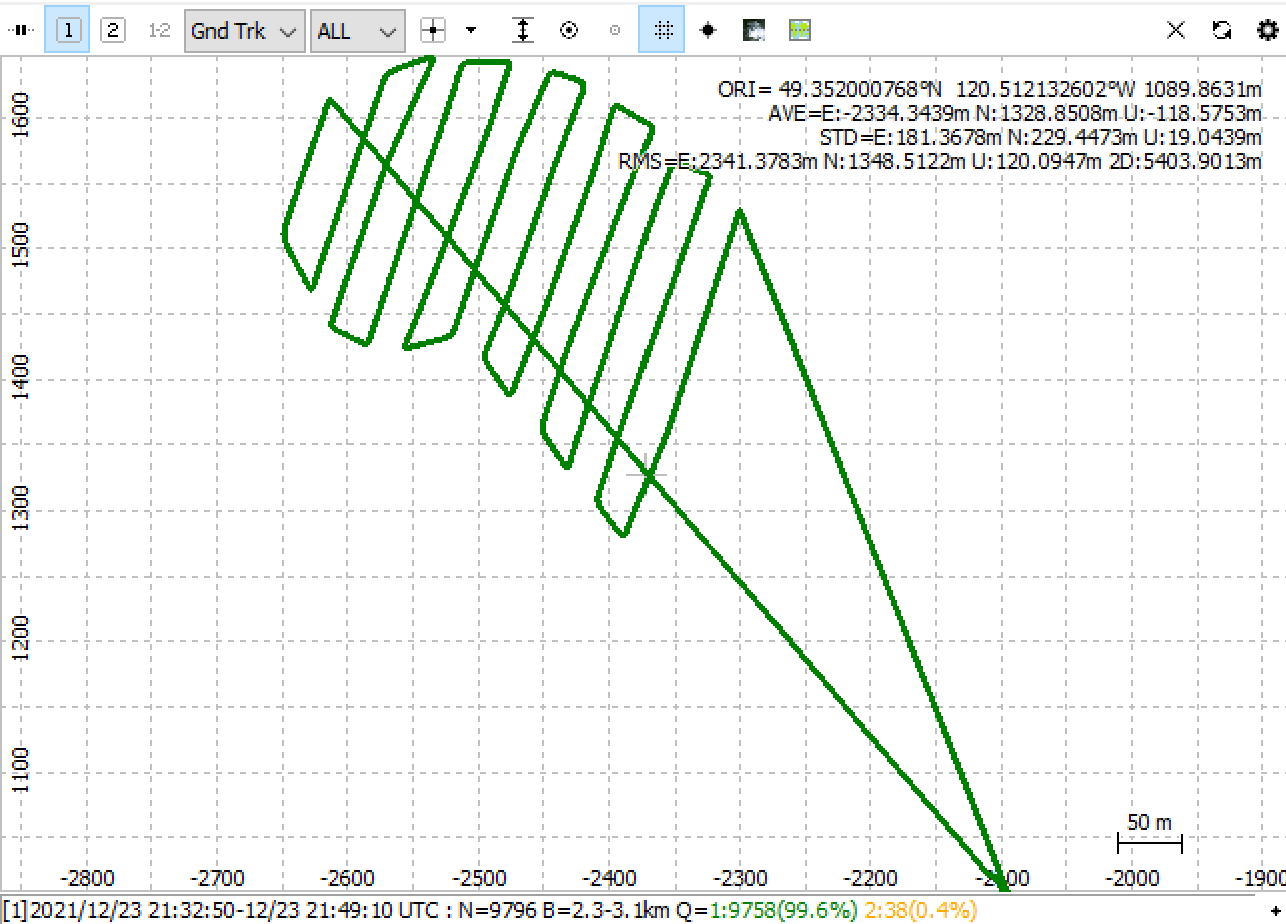
So I’ve got maybe 50 flights and tons on bathymetry scans in the first month I’ve owned the RS2 and M2. Everything has always been a fix solution in PPK. That was until yesterday. First flight is 100% float. Worst I’ve seen so far is maybe a few seconds of float after taking off. Weird thing, if I process it backwards and increase the elevation mask I get almost 100% fix.

2 Likes
If you share the logs, I’ll be happy to check if there some obvious reason from looking at the data collected.
1 Like
That would be great. I’d like to learn more about diagnosing issues like this. Here’s a link to the UBX files for the base and rover.
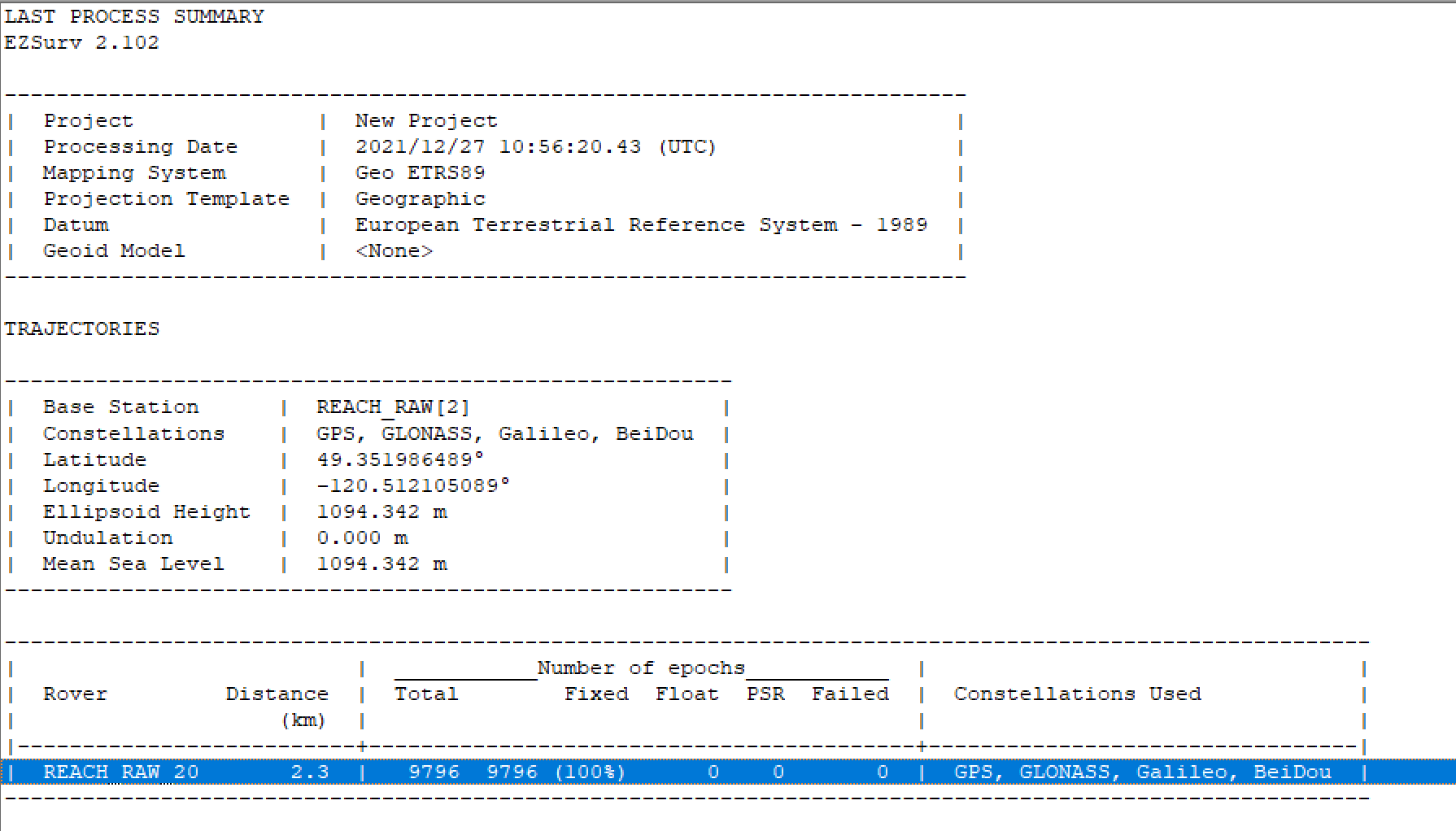
Known manually input coordinates are:
49 21’07.15136
120 30’43.578321"
1094.342m
Hi Shaun,
What settings did you use in post-processing? I’ve processed the logs you shared in Emlid Studio and achieved a 99.9% Fix with default settings.
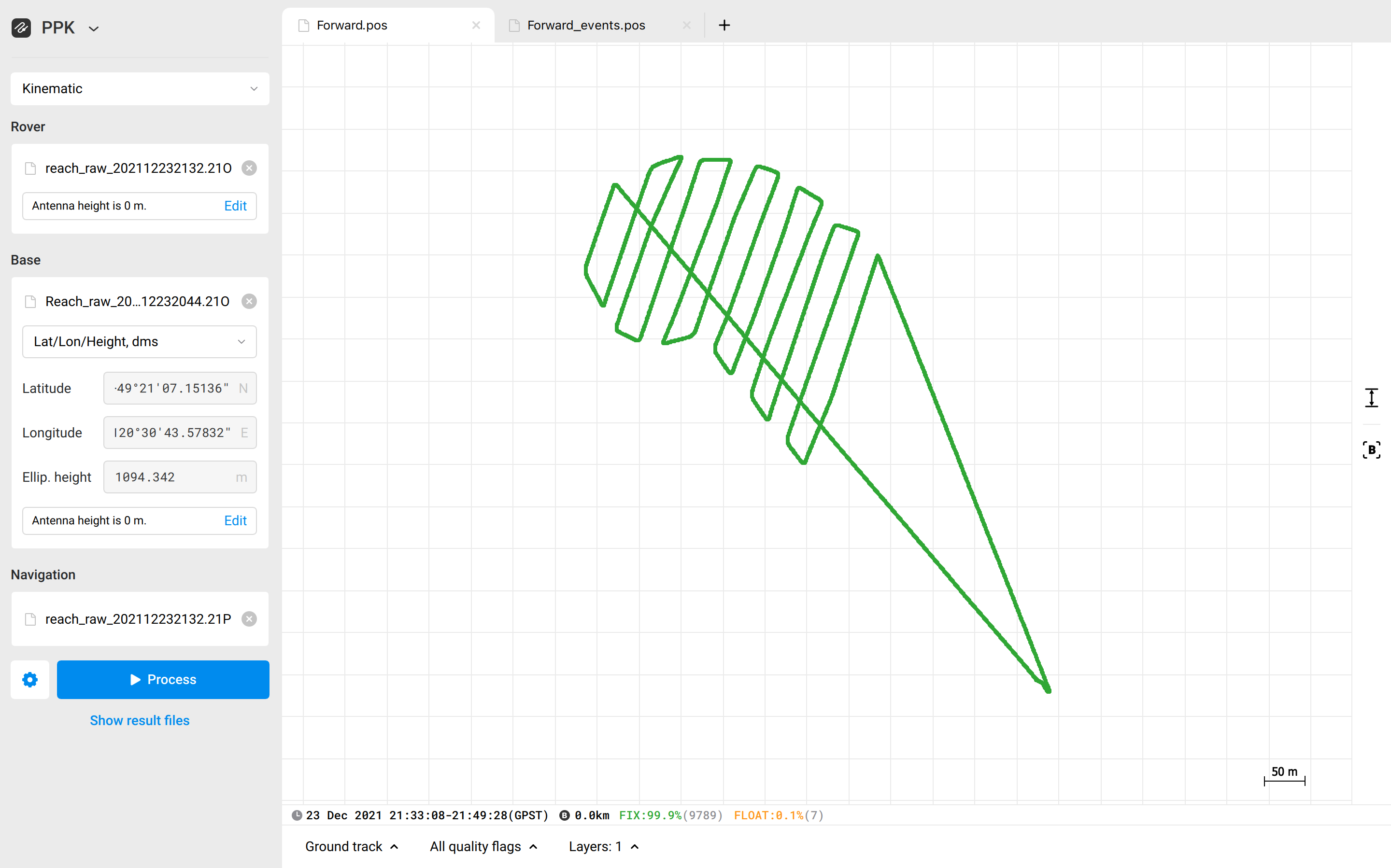
With the Combined filter type, I got 100% of Fix. At the same time, the Backward filter type gave 65% of Fix.
By changing the filter type, you change how Emlid Studio goes through the raw data and calculates the solution. Thus, it’s ok that the result adjusts accordingly. And this is also a great possibility of the PPK: you can find the combination of settings that gives you the best results.
2 Likes
Thanks to both of you for running that! I checked the setting’s and they were at the default. Still float… Shut emlid studio down and restarted, fix. Maybe a little bug in the app?
Shaun,
Thanks for the update!
Hmm, I’d say that the Float solution may have been caused just by a typo in base coordinates. But now it’s hard to say for sure.
Anyway, if such an issue resumes, feel free to contact us. We’ll find a solution.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.