(Forum is not letting me upload ubx files since I am a new member. I don’t know what it takes for me to have the access)
I didn’t get any fix in my flights. So I collected both rover and base logs with both the antennas at rest hoping it would give fix. But it didn’t. Can someone please help me with debugging steps?
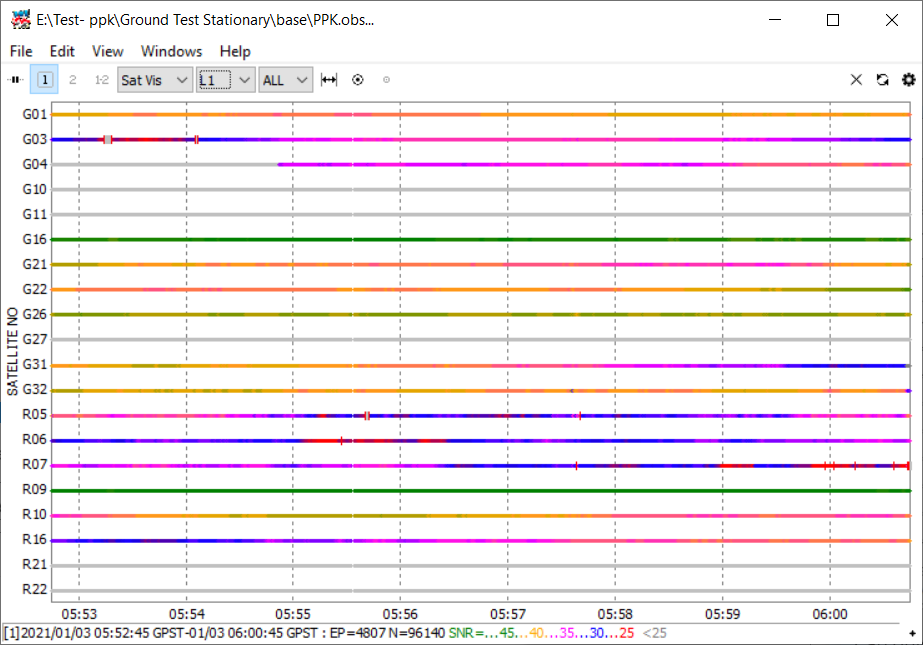
yes. It is on purpose. Since I couldn’t get ‘fixes’ on flight, I did a ground test.
The test was to keep the rover also stationary along with base seperated by about 10 meters and trigger camera images manually. I triggered about 50 images to log 50 locations. If ppk processing works, my ideal ground tracking of 50 images should fall within 2 to 3 cms. But since I am not getting fixes, the test fails.
I would advice to collect at least 15 mins of continuous data to ensure a fixed solution on L1-only. When processing, use the “Combined” processing option.
hi @wizprod. I been sick. Sorry for responding late.
When you say ‘15 mins of continous data’ what exactly do you mean?
I should trigger image events at regular intervals for 15 mins. (or) 15 mins of base station logging. (or) 15 minutes of idle state for rover after powered on before I trigger images
I think @wizprod meant you need to collect 15 minutes of data (for base and rover) in order to resolve ambiguities and get a ‘Fix’ solution.
I don’t know the/your typical workflow, but as long as your solution stays ‘fixed’, you can take as many pictures as you want.
If it’s all done through post-processing, you need the 15 minutes of data (or longer) before the flight, so RTKLib could get to a fix solution for gps-times before you start your flight. (correct me if I’m wrong)