



So I went back out to my test site and ran it again, no adjustment to settings. Accuracy is very good with a max deviation of 3 cm and an average of less than 1 cm deviation. I only lost fix once and it popped right back( set the rover up on the bipod and let it come back). I do have a lot of steel/brick vertical breaks that interrupt the line of sight and heavy RF interference. As before I noticed that the base would “loose” satellites and that the AR ratio would cycle from 4-100 during a shot. I’m not sure if this is real or a byproduct of the heavy RF messing with the gps/lora signals. As my fatal errors have gone away (loosing fix and it not coming back, or having fix with a lot of error) I’m confident that something was making an intermittent connection in one of the receivers, most likely the coax cable that goes to the LORA board both were finger tight but when assembling one of them there was a catch as the nut jammed on the barrel of the cable, straightening the cable a few mm allowed the nut to make 3 more turns.
Hi @NMgeologist ,
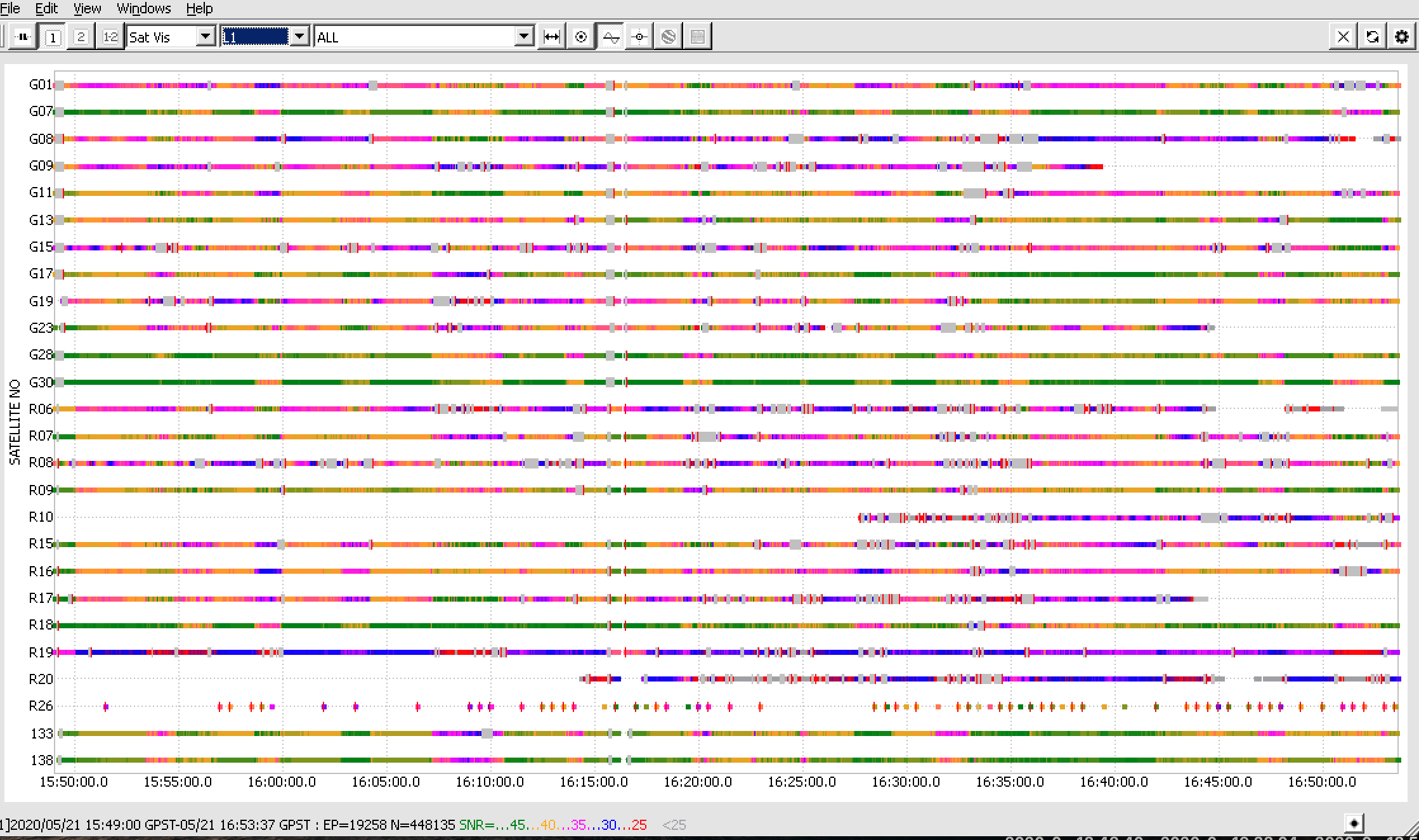
I see that you indeed had a fixed solution most of the time. However, the raw data from the rover is still not very good.
You’re right, big metal constructions can affect the signal. Could you please share the photo of these obstacles?
Also, I guess the base is placed in other conditions since its logs are better?

Image of my test site.
In your PM you mention my AR ratio being low, what its it supposed to be? It rarely gets over 100 and 20-40 is my average.
I have a dumb question on Rover settings, what are you supposed to put in for Base setting ?(on the rover). I have been entering the set up point Manually for the base in this setting. The survey settings have been more accurate and I don’t loose fix as often.
None of the buildings are really high or super close, there are high voltage lines on the west and south of the site. I notice that If I loose line of site because of a metal building the ar ratio will drop but then come back (4-40)
I did some more test today. The first run was setting the Base/Rover next to each other and running them for about a 1/2 hour. Fix and hold was on, I used 40deg masking due to the urban environment and GPS, Glonass, Galileo and SBAS enabled. Fix happen pretty quickly, and AR validation ratio went up after 10 min to 999.9. And AR started “scrolling” 4-40ish-999.9 it did this for the entire test. Also the blue tabs that show Base/Rover count would change pretty drastically every few minutes. The rover would stay stable but the base would loose about half the satellites. This was separate from the AR ratio. First test is timed 1822/1818base_202005251822Rover_RTCM3.zip (493.4 KB) raw_202005251818Base_UBX.zip (1.5 MB)
And test two was with Fix and hold off/ Continuous mode on. all other settings the same.
AR ratio was a steady 30-40 and never went higher than 50. The base rover count still jumped and the AR ratio would still jump from 4-40 but not as often as in fix and hold mode.
Timed 1903/1909 solution_202005251909Rover_LLH.zip (165.6 KB) raw_202005251909Rover_UBX.zip (4.9 MB)
Hey NMgeologist, we are having a very similar issue. want to hop on a call to compare notes?
Hi @NMgeologist ,
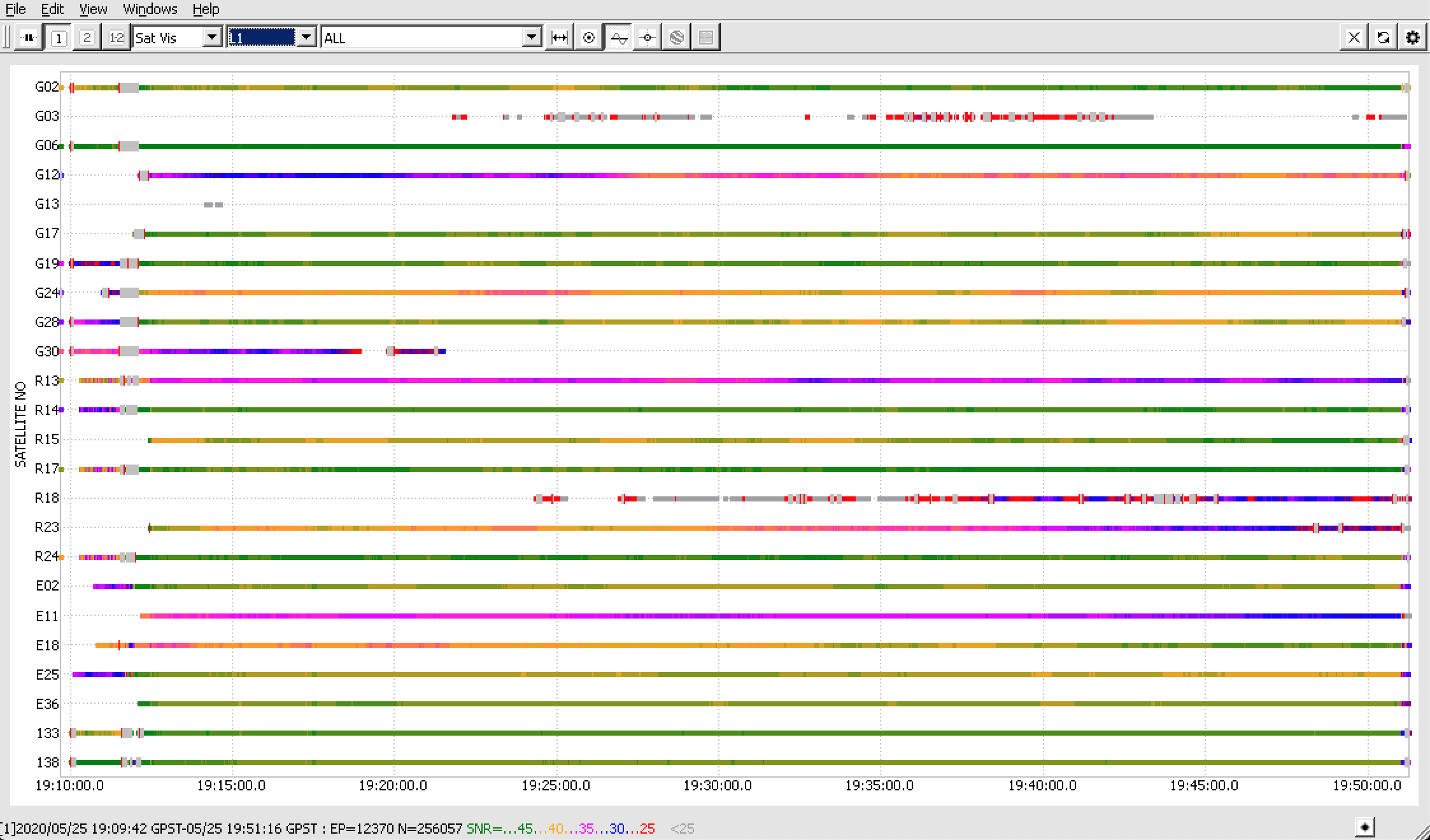
The raw data log from the rover looks much better now. It seems like something indeed affects the signal at your test site.
In your PM you mention my AR ratio being low, what its it supposed to be? It rarely gets over 100 and 20-40 is my average.
It’s not an issue. If this number is more than 3, Reach will consider RTK solution Fixed. I just wanted to point out that the higher this value, the better.
I have a dumb question on Rover settings, what are you supposed to put in for Base setting ?(on the rover).
You shouldn’t set anything in this tab on the rover. This doesn’t cause errors but doesn’t affect anything. Rover receives a base position via the 1006 RTCM3 message.
So I re flashed to an earlier version of firmware. It was “messier” to work with and I had more problems holding on to a good AR. Two test were done side by side like before and the ar would fluctuate from 4-999 in fix and hold mode about every 3-6 seconds. In continuous mode it would also scroll from 4 to 20/30 several times a minute. The range was similar to before I got past 250 meters and as long as I had line of sight it would get some sort of fix. building ect would of course block it. I’m just going to upload the range test as these are a lot of small files to mess with, if anybody wants something let me know.
Hi,
Seems that the raw data log from the rover wasn’t fully loaded. I can’t download it  May I ask you to share it once again?
May I ask you to share it once again?
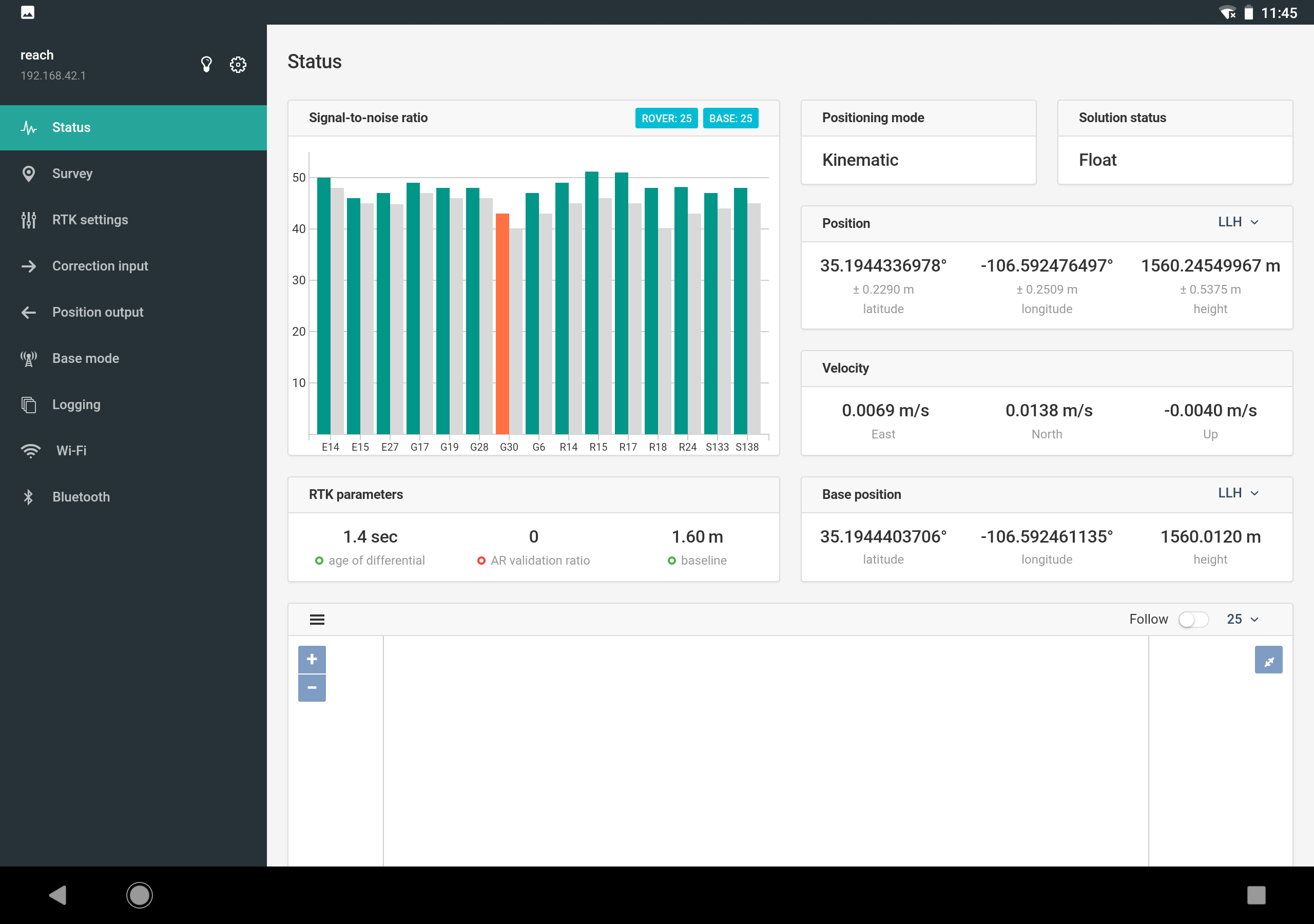
Emlid ARvalue scrolling while recivers are sitting still
Doing a quick front yard test to show one of my consent problems. This is in fix and hold mode, its better in continuous mode but still happens.
EDIT: This behavior does not change with location or any settings that I have found. it does not seem to affect the CSV files but it is very unnerving.
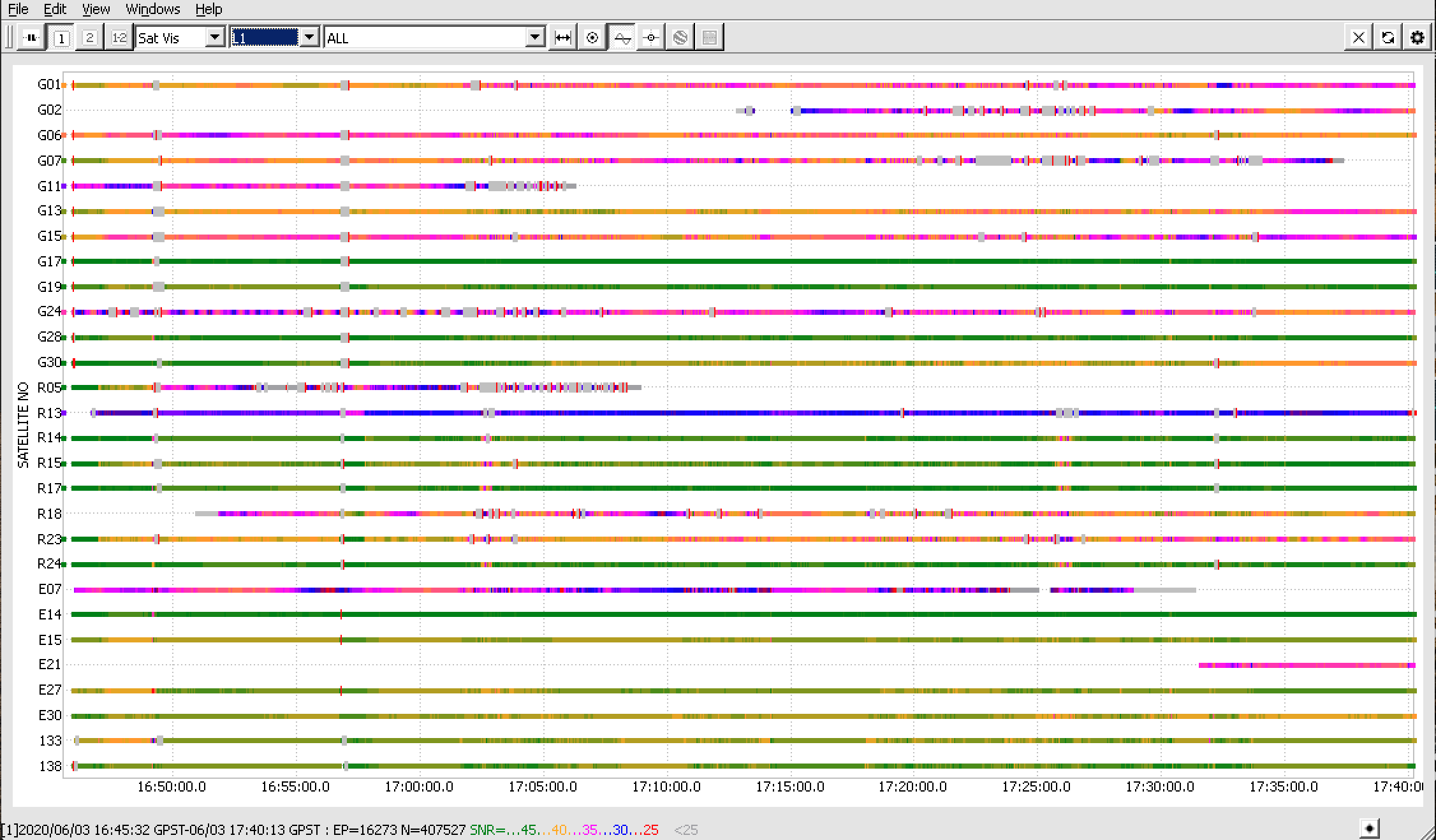
So a few days ago I checked the connections on my EMLID RS+s and found a loose coax cable to the lora radio board. I re assembled the receivers and did a firmware update ( I was doing some testing in an older firmware) went and did a quick range test at my known site. I set up on my known point and slowly drove around trying to see if I would loose fix being to far away from the base. I was able to exceed 250m (my former limit) without a problem and was able to shoot some pins over a km away. I came back to my base shot a few known points to make sure the data was good and then I lost fix. And it did not come back up without resetting the rover.
1 step forward 2 steps back
base_202006031645_RTCM3.zip (748.1 KB) raw_202006031633_UBX.zip (2.8 MB) raw_202006031645_UBX.zip (7.9 MB) solution_202006031645_LLH.zip (262.9 KB)
P.S. The scrolling issue showed above was recorded after I did this survey. In continuous mode it slows down a lot but still happens even when the receivers aren’t moving say every 3-5 min instead of every few sec.
I haven’t heard from Emlid in a month… Am I supposed to do anything else? Do i just live with the weirdness until the next update?
Hi @NMgeologist,
Thank you for your reports!
This month, we’ve also conducted some tests for the LoRa range, and RTK Fix stability. Based on the results of these tests, we released v2.22.5 of the ReachView app for Reach RS+. This version was tested in a field with consistently satisfactory results, so I believe it should work fine for you.
Unfortunately, I still can’t access your rover logs from 29.05. I guess they are just too large to upload. However, I’ve checked the latest logs. The screenshot of the raw data from the rover is below.
First, I must tell that there should be no issues for Reach RS+ to work with such data. However, there are still some cycle-slips and SNR values’ instability where they shouldn’t be. It might cause AR ratio value jumps. It’s not a big issue since the value changes between 4 and 999 in an interval of a Fix. It would be a cause of concern in case it jumped around 3, between Fix and Float.
Also, I’d suggest trying different GNSS systems selections. I noticed that GLONASS satellites look a bit less stable than others. For example, R18 and R23. You can choose GPS + Gallileo + BeiDou.
So, may I ask you to update your receiver to the latest v2.22.5 and give us the feedback?
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.