



There is a lack of data in the rtcm3 and since the base rinex does not issue the corrections, it is impossible to reach a conclusion, I did the same as you
These are the logs that I have, is the emlid RS+ not logging information? Its not obvious but on the 4.30.2020 (upper right) position plot its failed to log two survey points. But the data is in the csv. And those are not the points that have the high error. Anyone from EMLID care to chime in?
Hi @NMgeologist,
Thanks for the logs! It might take a while to figure out what could be wrong. I’ll check all the data and write you back.
Thanks Svetlana!
So after reading on the forum last week i thought that I might be able to fix some of my many problems by tinkering with settings. Monday5.11.2020 everything worked well until I had had the equipment on for 35-45 minutes and I loose fix. Not that big a deal just set up the bipod and wait for the Fix to come back, it took a good 10-15 min to get it back and I finished my survey. Comparison to my points were pretty good with one 3.6 cm Z reading, everything else was less than 2cm.
So thinking that I had fixed some of my problems I went out to another surveyed site and started shooting points. At 600meters I loose fix and it does not come back, frustrated I drive back to the base adjust the air data rate from 18.23kbs to 9.11kbs. I get the range back shoot a couple of points and then the fix goes away and refuses to come back. logs will be posted below…
And some extra files because I rebooted my rover…
raw_202005121741_UBX.zip (7.8 MB) base_202005121741_RTCM3.zip (637.9 KB)
Over the weekend I did a short test in my front yard. raw_202005171430Base_UBX.zip (2.1 MB) raw_202005171433Rover_UBX.zip (2.1 MB)
What I am seeing is very limited range, with a line of sight 300 meters is hard to do, and after about 35-45 min I loose fix and it does not come back. When I have recovered fix it has proven to be inaccurate when I measure known points. I feel like something is off with the lora due to having similar observation files on both receivers. I have opened both cases up and examined the coax cable connection and checked for obvious loose wiring nothing seems broken inside or with the antennas. Both receivers are running the latest firmware. The settings seem to be generic North American settings, GPS 1Htz, Glonass 1 Htz, SBAS 0.5 Htz, ARP 0.1Htz, Both receivers are operating at 1hz, Kinematic mode, GPS AR mode is continuous, Glonass AR mode is On, elevation mask angle is 30 deg (im in the city) with SNR mask at 40. LoRa settings are 928MHz, 20dbm, at 9.11 kb/s
Hi,
I’ve checked the logs you sent. I’ve noticed a few general points and described them on the example of your last test from 17.05.
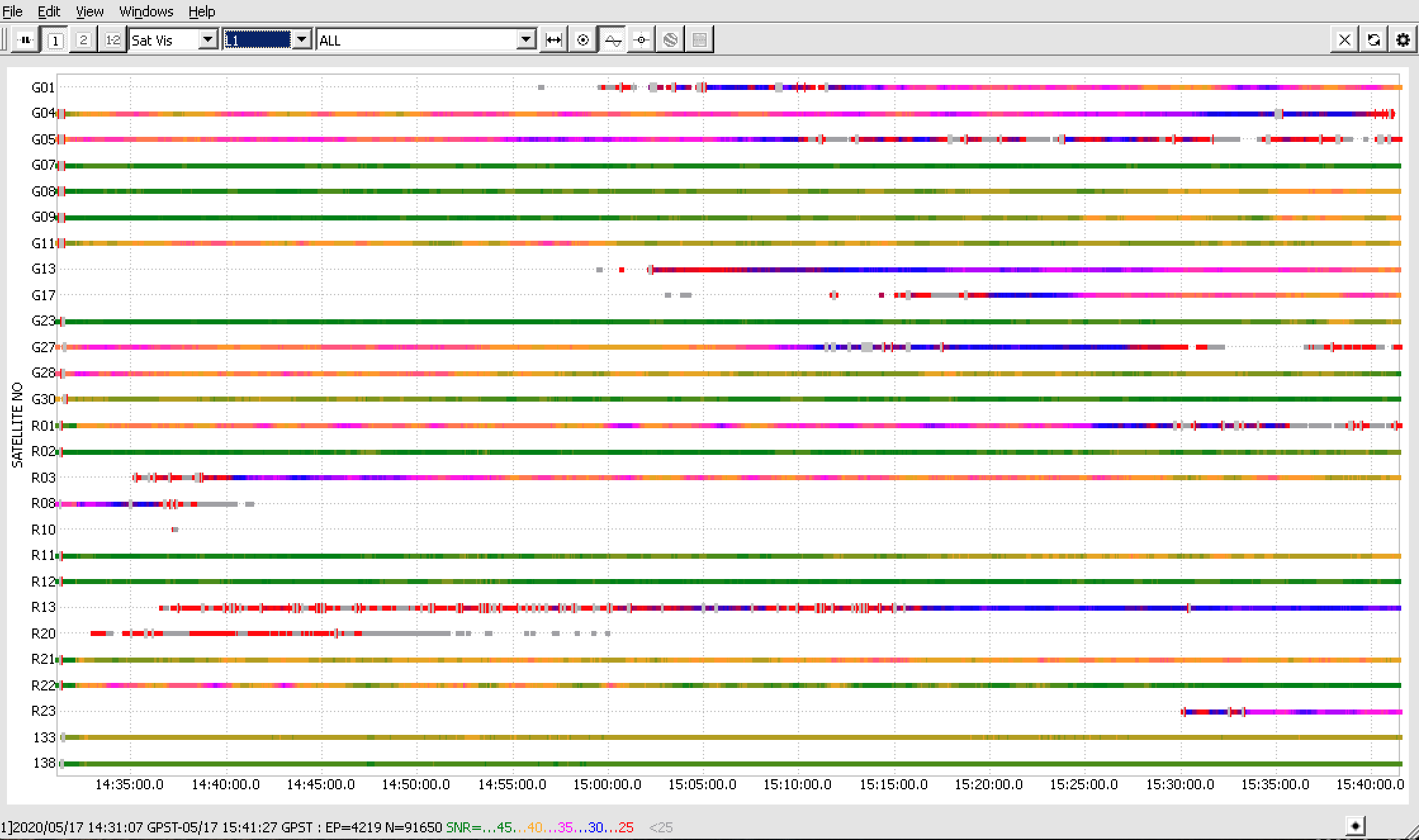
According to the raw data from the rover, some obstacles block the sky view for the receiver. Please take a look at the screenshot below. Closer to the end, you can see a lot of cycle-slips, which explains why you lost the fix. Besides that, the SNR value of the satellites is unstable, which also affects the RTK performance.
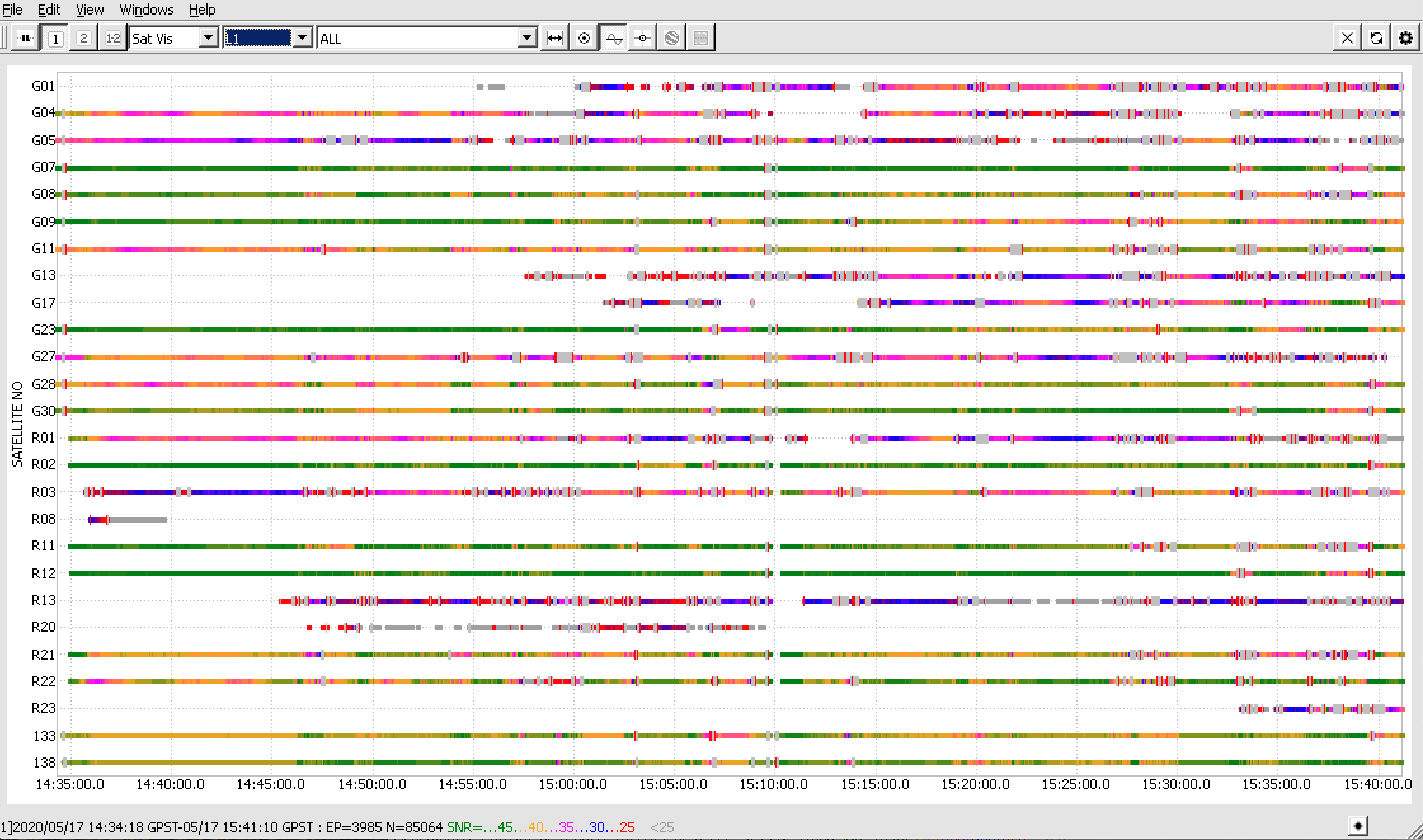
The logs from the base look better. However, it’s hard to obtain a fixed solution if the signal on the rover is poor.
So, may I ask you to accomplish one more test with the following recommendations?
-
Make sure that both base and rover are placed in an open area. Reach RS+ is a single-frequency receiver that requires a clear sky view.
-
Set the update rate for the rover at 5Hz. For the base, 1Hz is good.
Also, please record these logs for 15-20 minutes and share them with me:
- raw data log from the base
- raw data log from the rover
- base corrections log from the rover
- position log from the rover
Thank you!
2 Likes
I did a test yesterday afternoon
base_202005192018Rover_RTCM3.zip (1004.4 KB) solution_202005192018Rover_LLH.zip (633.6 KB) raw_202005192010Base_UBX.zip (3.0 MB)
1 Like
Hi,
Could you also share the raw data log from the rover?
https://drive.google.com/open?id=1o2j3Rw9dEApTlR3WG2yXe1ZF5kj74vIw
Sorry Svetlana, I had to set up a shareable file for that one…
I lost Fix three times but it came back without messing with anything. I shot my test points and the Survey data is great (less that 3cm offset, average was 1.5 X Y and Z). The rover would did show some oddities during the survey. AR # would swing wildly (3.5-50), and on a regular basis the base/rover satellite count would “loose” contact with half of the base satellites B20/R20 would turn into B12/R20. At the end of the survey I still had fix usually it would go away… So I headed out as far as I could and see if I could break the 250m wall that I have had. I got a good shot out at 400m (line of site) which is a first.
base_202005211548_RTCM3.zip (786.6 KB)raw_202005211544_UBX.zip (2.5 MB) raw_202005211548_UBX.zip (9.1 MB) solution_202005211548_LLH.zip (325.1 KB)