Hi,
Goal: Im trying to accurately map and navigate an area using Emlid Reach integrated into a pixhawk build drone. I am using Reach RS as a base station.
Problem: I get fix solution on the Reach RS using NTRIP. However, My rover (drone) constantly goes back and forth between float, fix, and Dgps, when I monitor the solution on mission planner. Also, After mapping my ground control points are not accurate compared to the gps coordinates I get from Reach RS.
Drone and Base Set up:
My Drone is using a RFD900+ as the communication link.



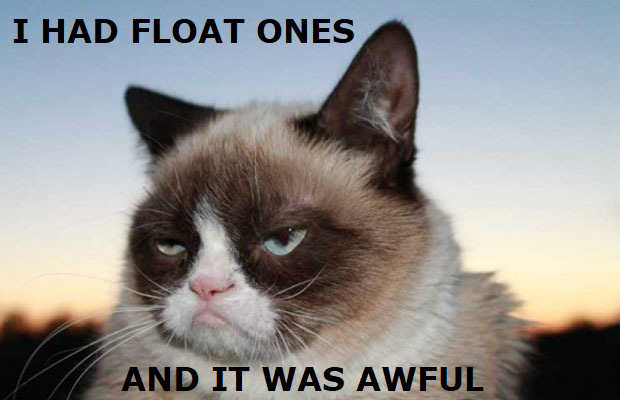
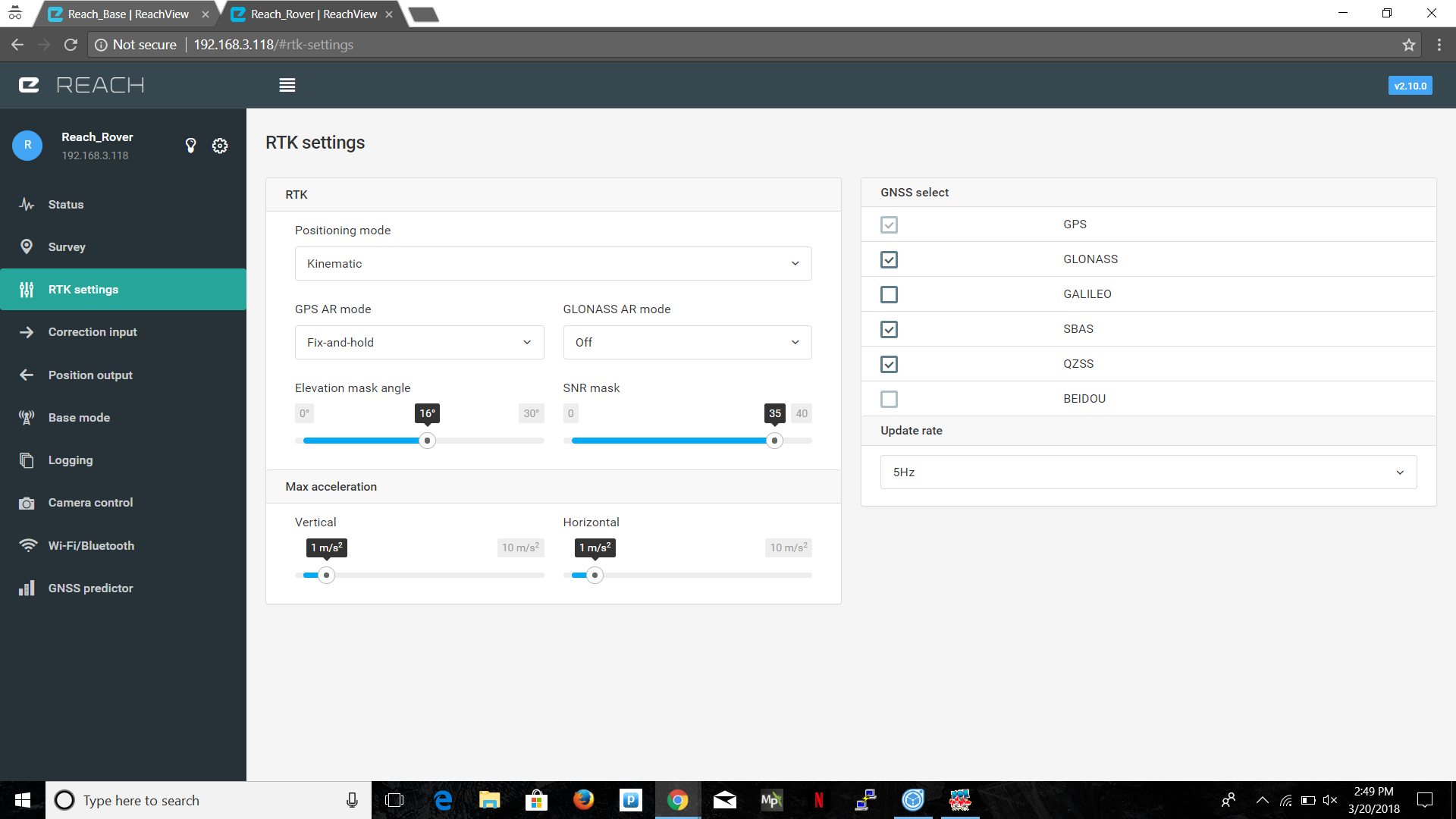
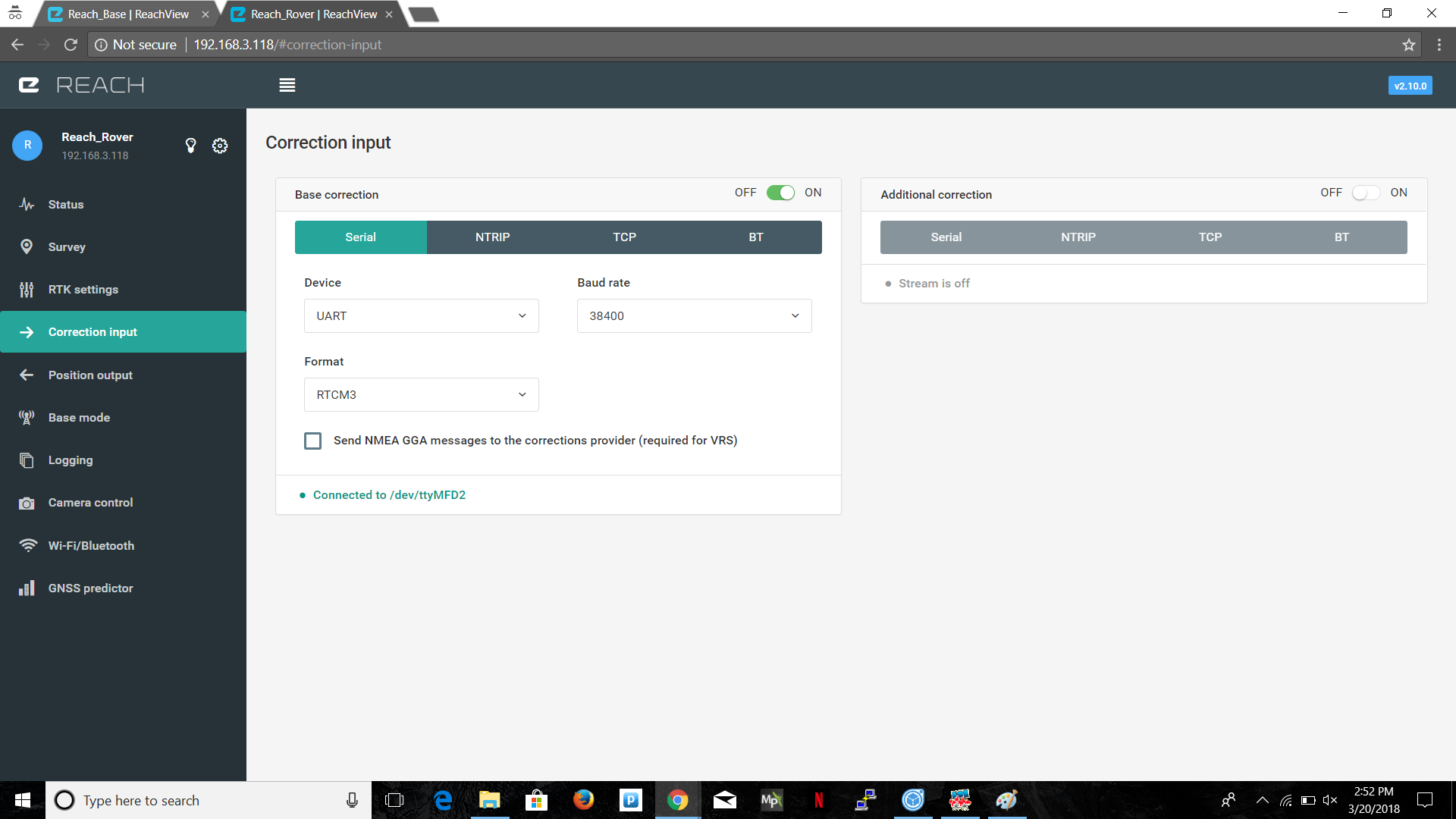
Rover Settings:
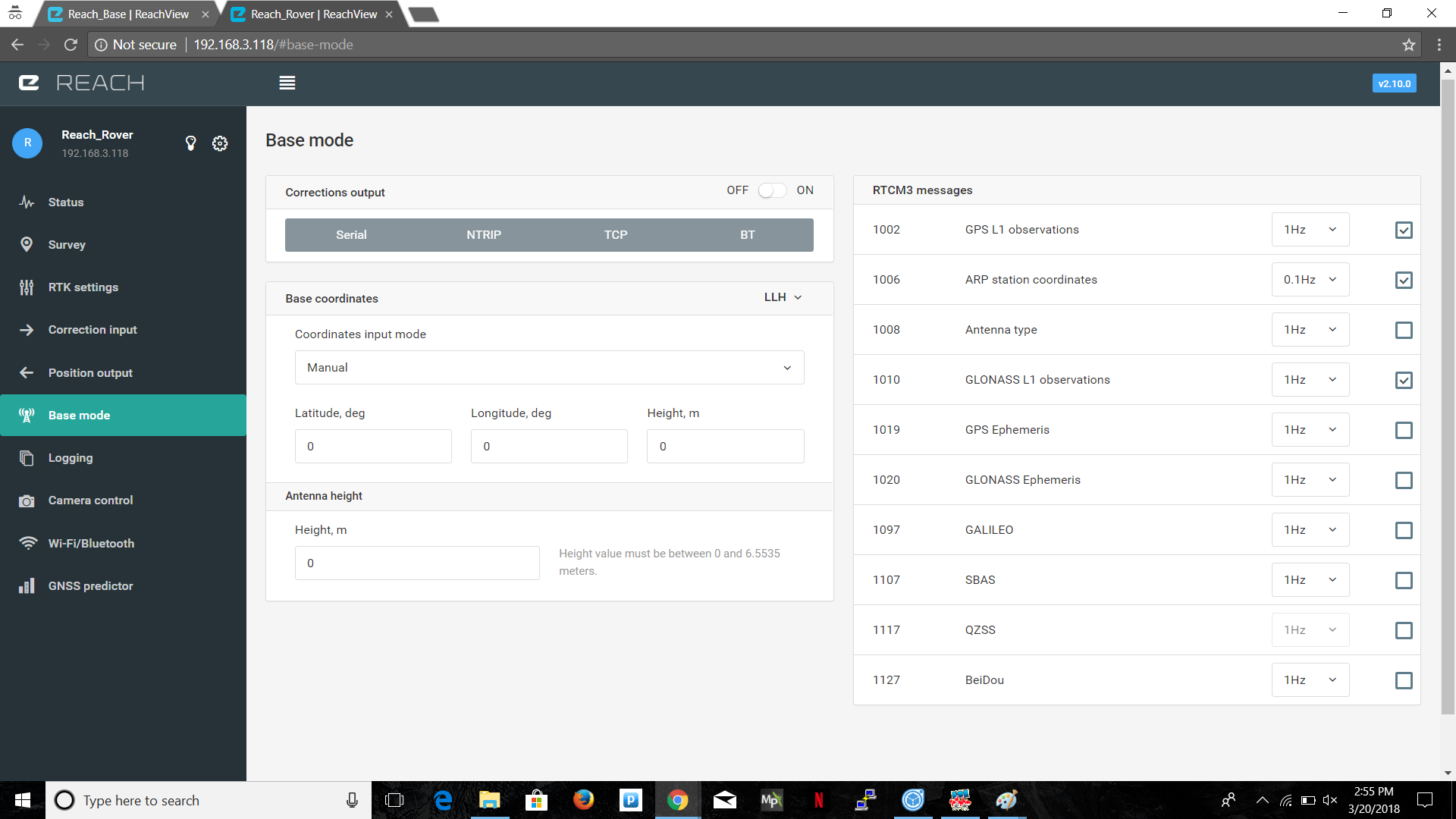
Base Settings:
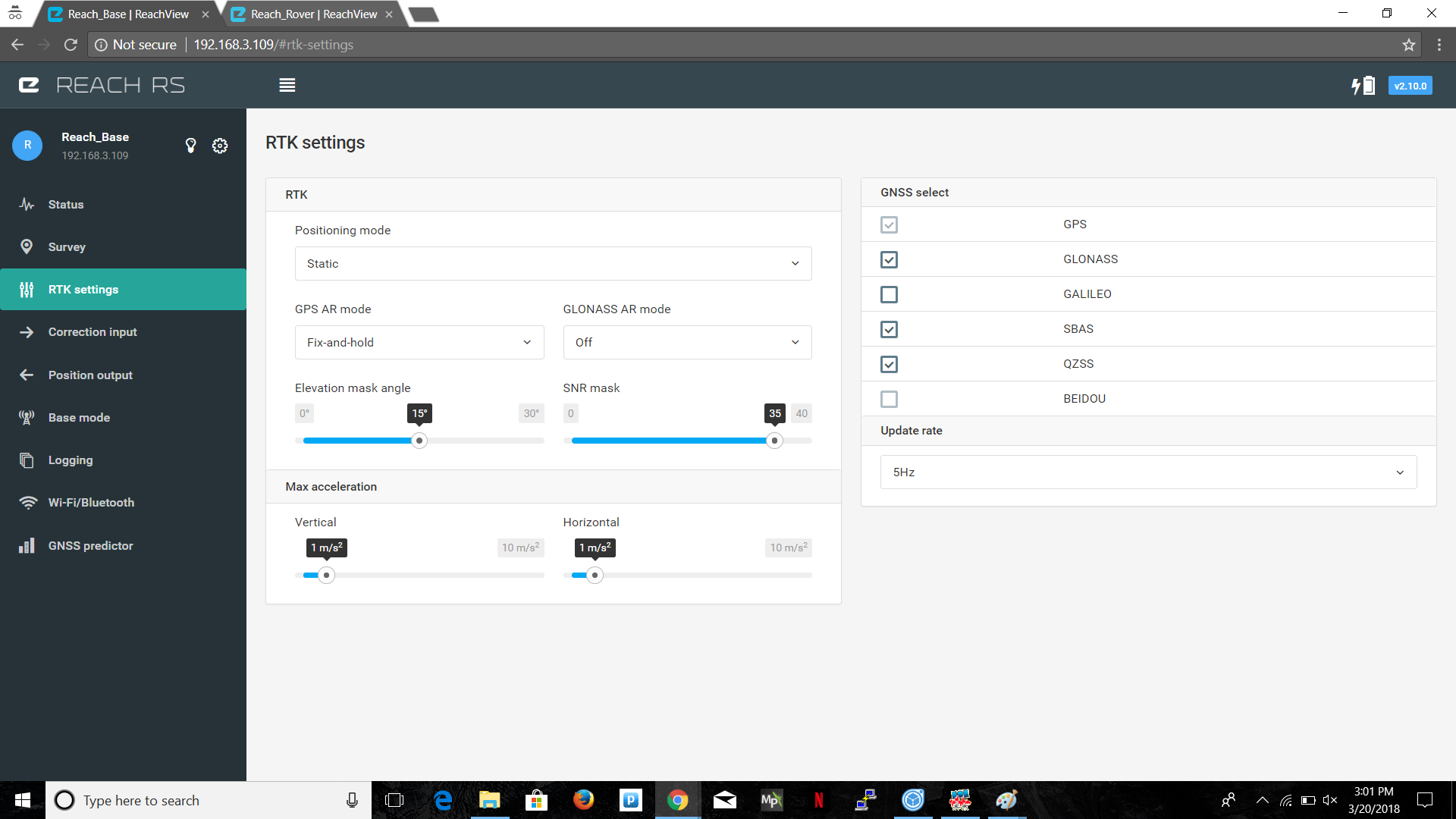
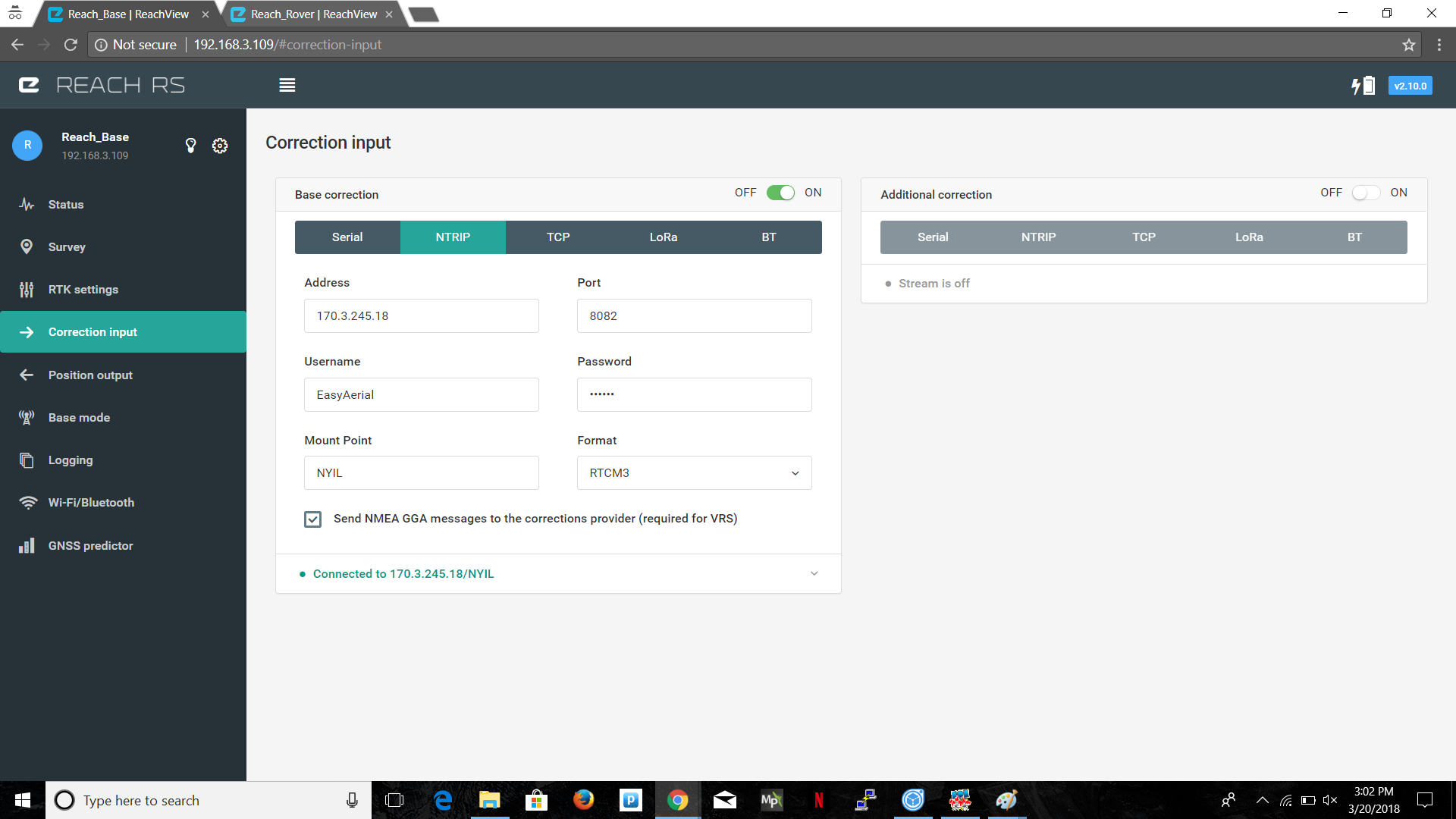
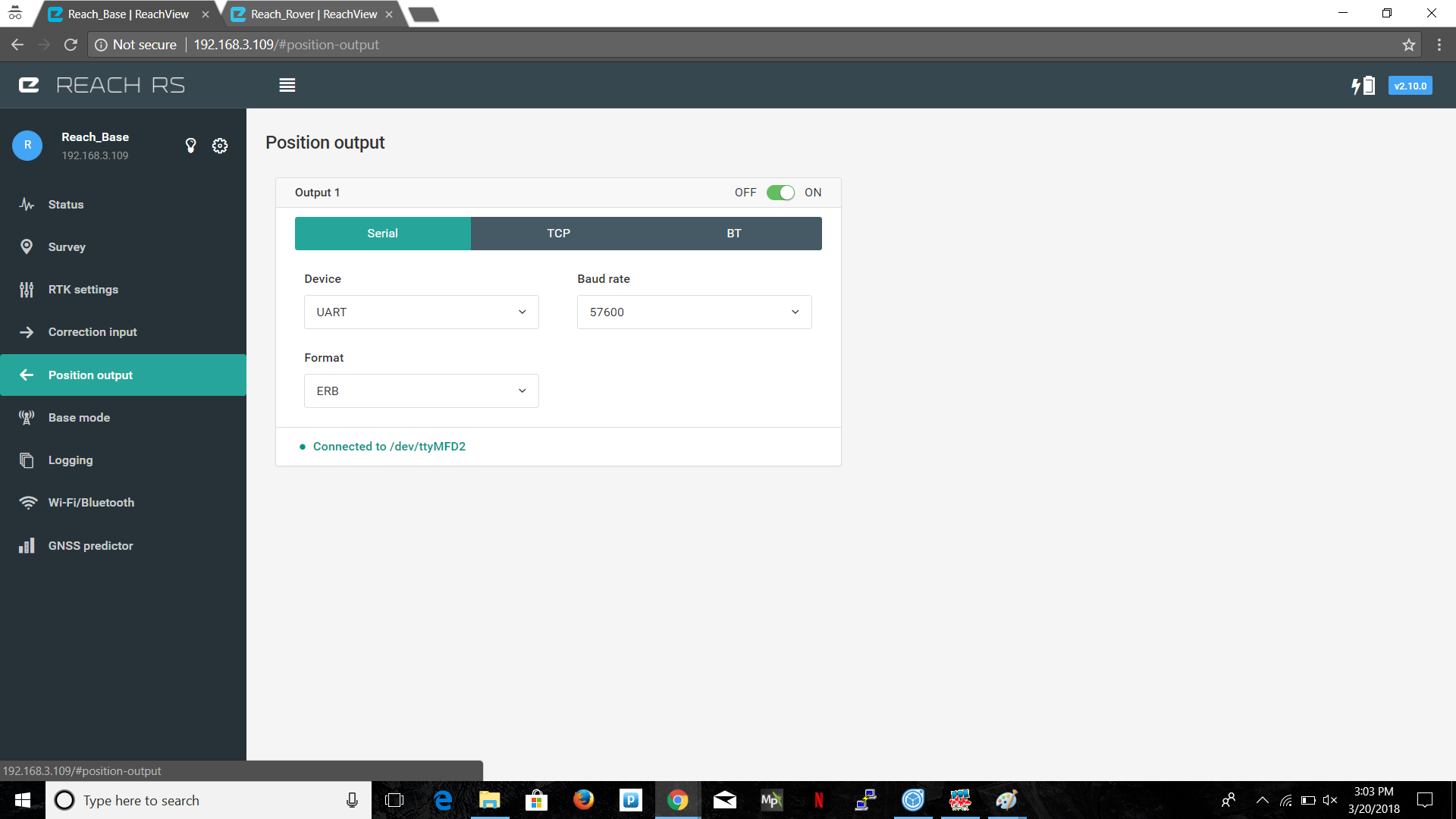
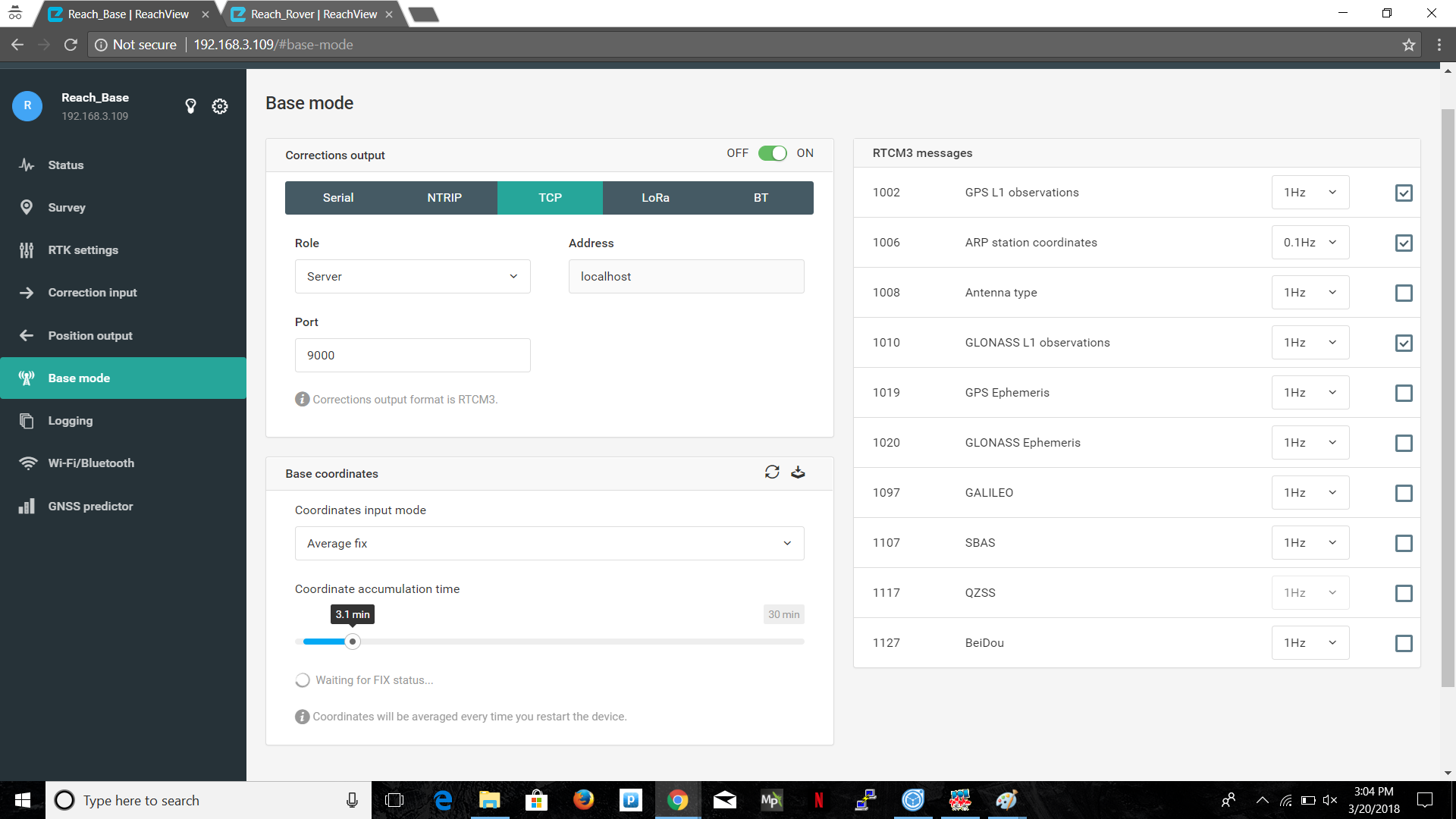
Here is what I did:
After setting all the parameters/ settings in the Rover and Base as the above images. I went out to a field placed control points (orange landing pads as seen on the pix4d image below). Placed the Reach RS as close to the middle of the X as possible. Turned it on and waited to get a low error float solution or fix solution. The Reach RS was getting its correction from NTRIP provider from a cellular phone gsm WiFi connections. I recorded three points with the Reach RS then turned on my drone.
From the Reach View app I chose average fix for the base mode of the Reach RS. Once the calculation were done. I opened mission planner and injected the correction to the drone. As soon as I inject the status goes from DGPS to rtkFLOAT. I waited some time for the error to reduce and got FIXED.
I set the mapping mission on mission planner and then executed the mission. As the drone started to fly the solution fluctuated between DGPS, FLOAT, and FIX.
When I mapped the images the error was from 20 cm to 1 m.
Example of the my results:

The point in the middle of the X is where I place the Reach RS and was able to get float solution with +/- 0.006 m in Lat., +/- 0.0015 m in Lon.
After mapping with the drone. The point on the left is where the GPS coordinates actually is. So, I have an error of almost 3 ft.
Pix4d link to the rest of the map and points:
Other Info:
ReachView v2.10.0
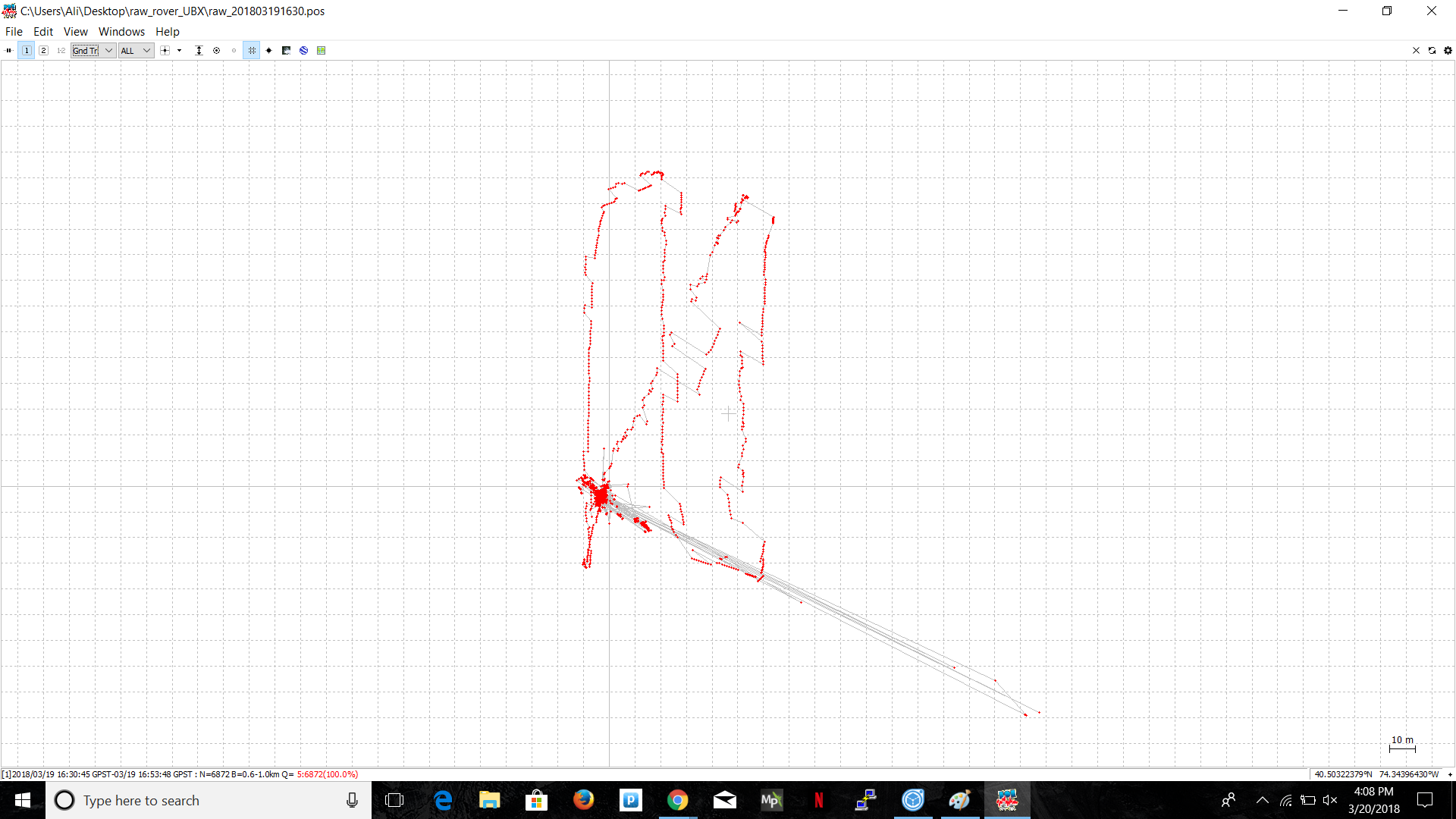
RTKPLOT image. it shows that i never had float or fixed
Base Plate under rover antenna is a copper plate with a 65mm in diameter.
The Reach RS is in Static positioning mode and the Rover is Kinematic.
Please help us in reducing the error. Right now the error is the same as a regular GPS.
Thanks,
Ali Sahin