



this is the configuration how it should look like:
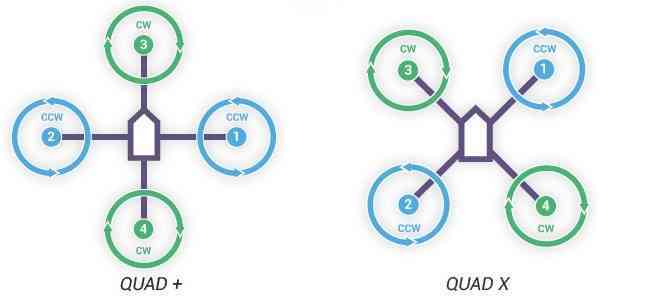
port 1 on Navio should be front right motor (which spins ccw);
port 2 should be back left motor (which spins ccw);
port 3 on Navio should be front left (which spins cw);
port 4 on Navio should be back right (which spins cw)
[also you can do the “motor test” in mission planner (optional hardware tab) to check if motors spin correctly; they start front right and go around to front left]
as @mikhail.avkhimenia stated, a video would help if the picture above doesn’t clear the situation!