I have checked the possible reasons here: Archived: Troubleshooting — Copter documentation But i cannot find anything wrong with my procedure.
Can anyone help me with that? Is it because the drone is too heavy?
can you share some more informations on how your copter behaves?
my guess into the dark:
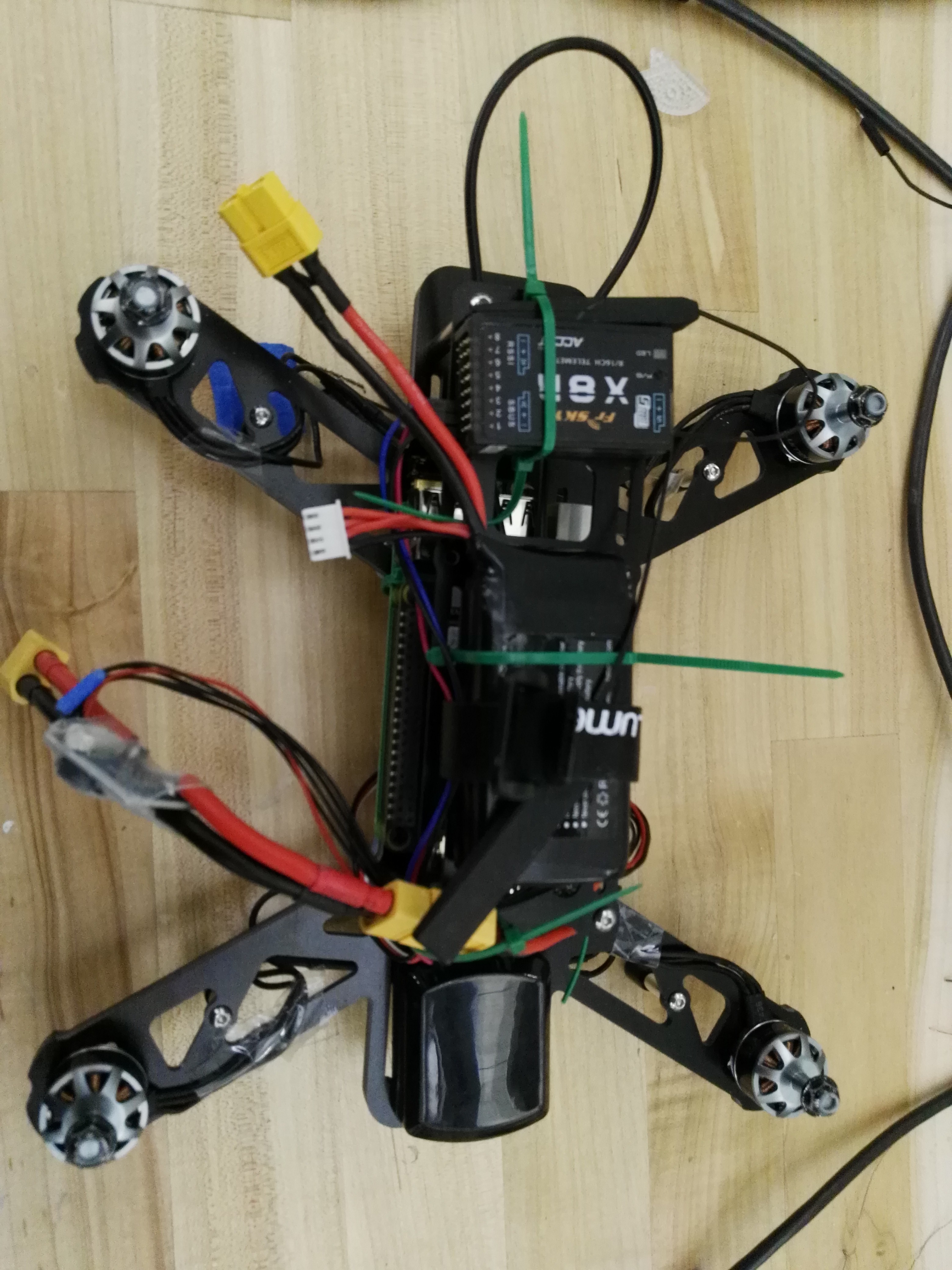
are you aware that your usb ports point to the front unless you change AHRS_orientation?
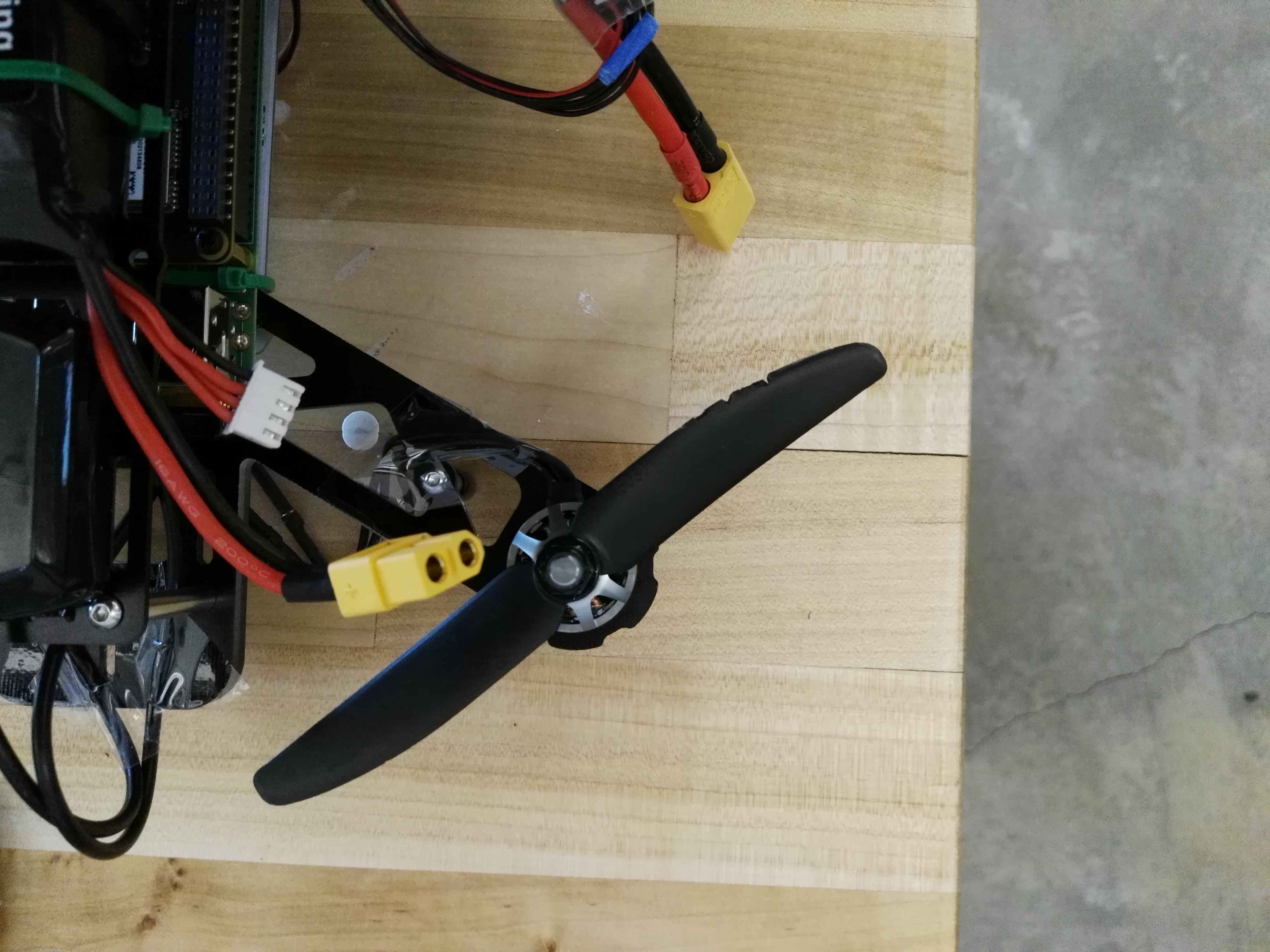
Did you recheck prop spinning direction? (motor left front and right back CW; motor right front and left back:CCW)
Would be great if you could shoot a video of what’s going on.
Also, please put the GNSS antenna on top, currently huge part of the sky view is blocked by other hardware.
connect it to mission planner with: ‘ArduCopter-quad -A udp:192.168.1.2:14550’
Pre-arm safety check, because I did it indoor, so only the GPS is unavailable. The other parameters are good.
Increase the throttle, at first the propellers spin with low speed. As the throttle increases, it flipped over form motor 3 and 4 to motor 1 or motor 2. Flip over from tail to head.
Both the spin direction and propeller direction are correct.
For pointing to front, the white arrow on navio2 points to the front, is that right? And the right motor is numbered as 1, the left is numbered as 2.
connect it to mission planner with: ‘ArduCopter-quad -A udp:192.168.1.2:14550’
Pre-arm safety check, because I did it indoor, so only the GPS is unavailable. The other parameters are good.
Increase the throttle, at first the propellers spin with low speed. As the throttle increases, it flipped over form motor 3 and 4 to motor 1 or motor 2. Flip over from tail to head.
Since I am just trying to see whether it can take off, does the antenna will affect the taking off? Actually I flied it indoor, so the GPS data is unavailable.
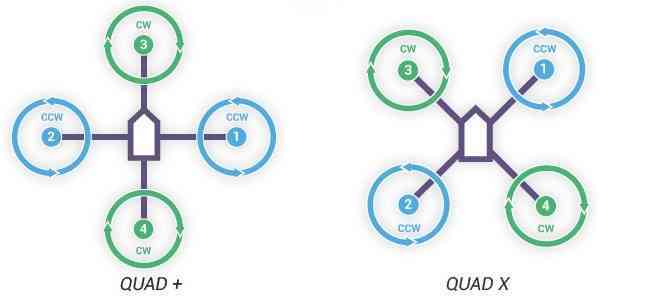
this is the configuration how it should look like:
port 1 on Navio should be front right motor (which spins ccw);
port 2 should be back left motor (which spins ccw);
port 3 on Navio should be front left (which spins cw);
port 4 on Navio should be back right (which spins cw)
[also you can do the “motor test” in mission planner (optional hardware tab) to check if motors spin correctly; they start front right and go around to front left]
as @mikhail.avkhimenia stated, a video would help if the picture above doesn’t clear the situation!
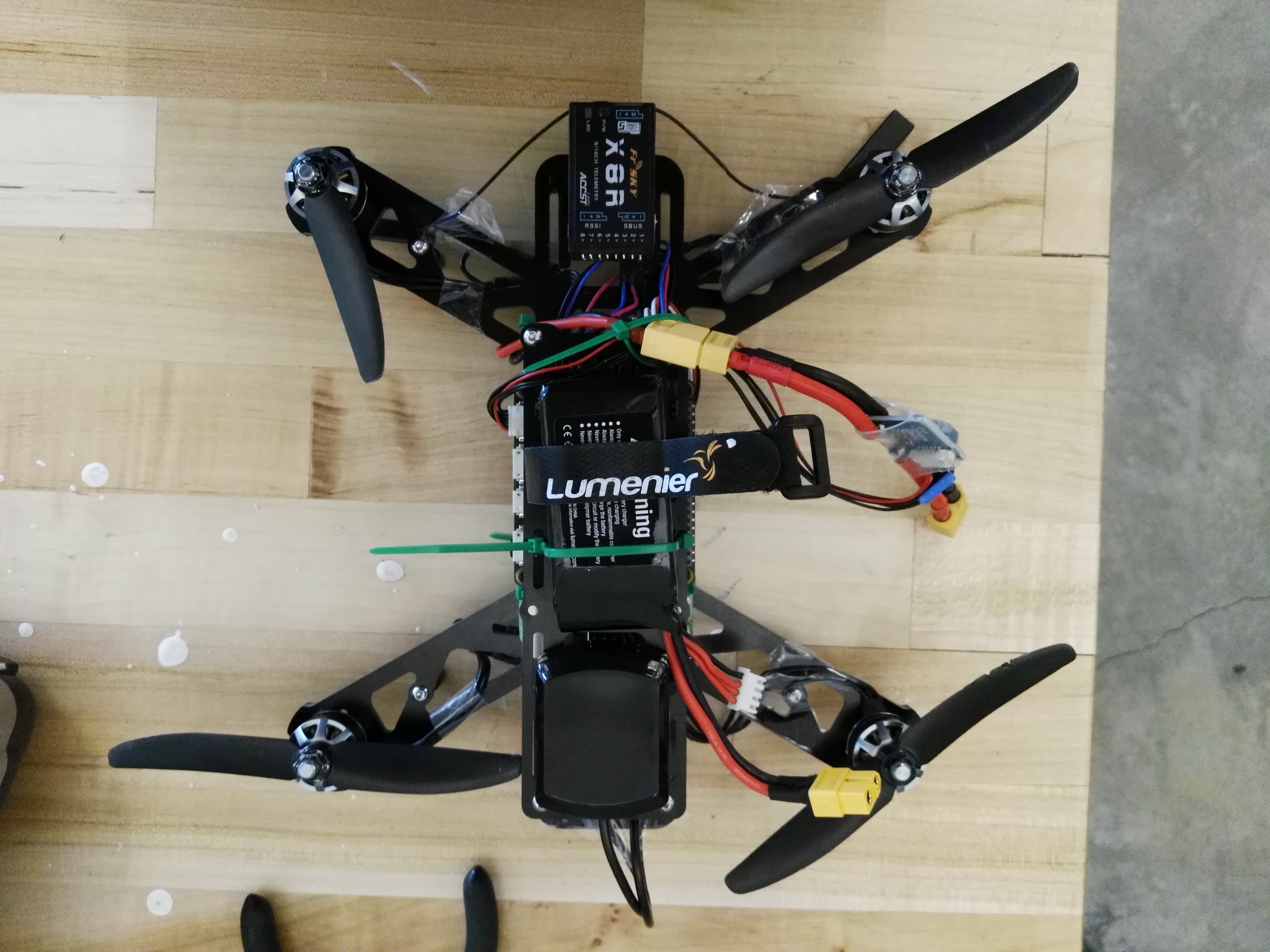
I did not arrange the port number as you stated. But the spin directions are exactly the same after I change the 3 wires of the motor. I am checking motor 3, seems it is does not rotate as smoothly as others.And the flipping over is 2 and 4 to 3 of “X” configuration. I will take a video next time.
The costumer service of this frame told me that it is “H” configured. The video is taken after I change it into “H” configuration. I have checked the motor and propeller direction for “H” configuration. I am sure the directions are correct.
i’m not really sure if i understand;
ArduCopter-quad -A udp:192.168.1.2:14550 does start the “autopilot” transmitting data to your gcs (eg mission planner)
a very easy explanation (not nearly the way it really is…)
your remote control controls your copter with 4 channels:
THROTTLE: climb or descend (all 4 motors increase or decrease rpm)
ROLL: motors on left or right decrease to roll on the desired side
PITCH: motors on the front or back will decrease or increase to tilt to the front or back
YAW: motor with ccw and cw spin decrease or increase their spin to turn the copter cw or ccw!
all in all your copter always try to stay level totally by its own; and also taking into consideration what your remote control tells him to do!
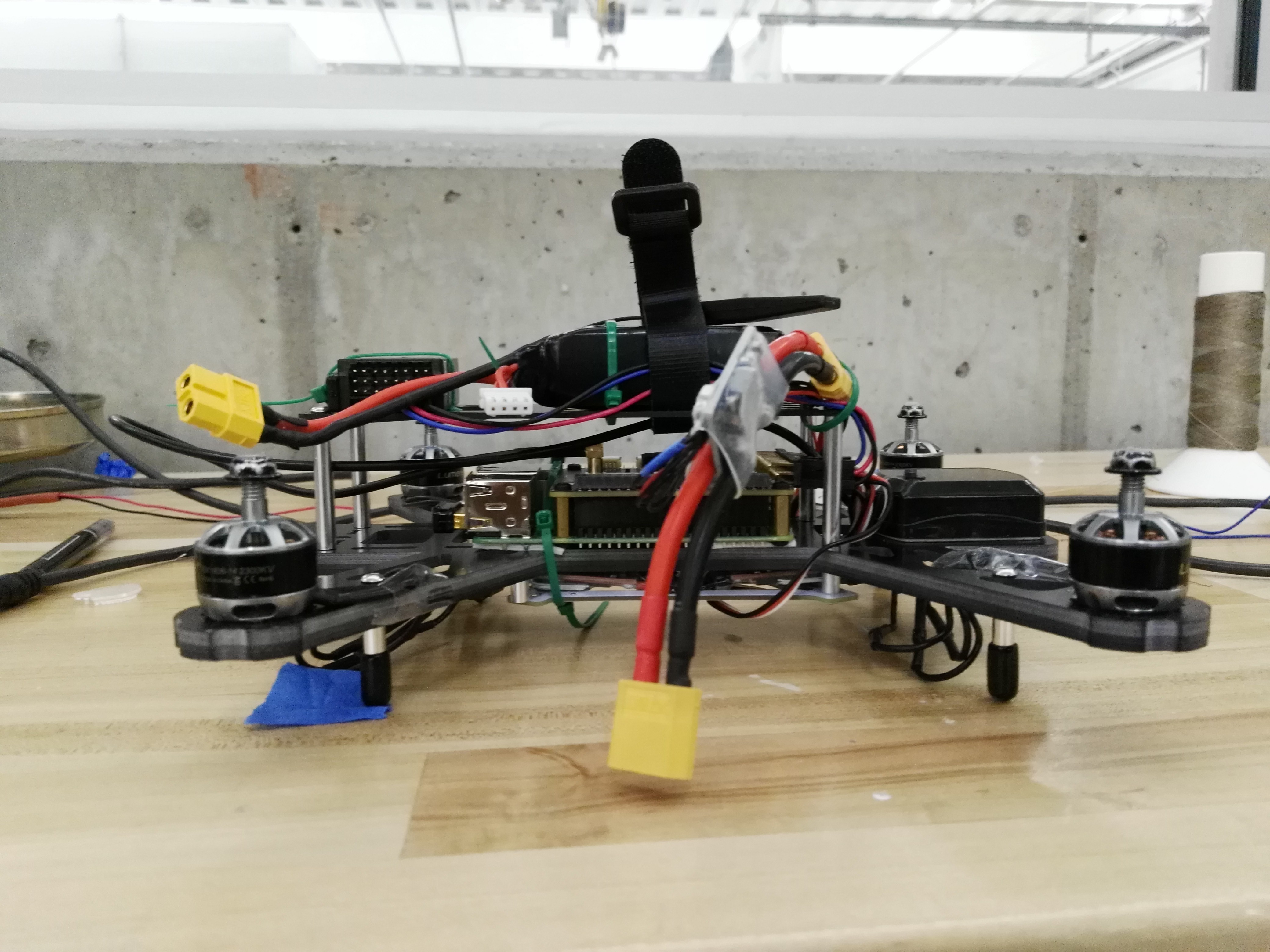
that means: if your copter tilts only by raising throttle, it’s most likely a motorposition or motorspindirection setup issue!