If you have restarted your base that would have triggered reaveraging and as a result change of base position. That would also translate to rover position shift.
Also, I see that you have disabled all GNSS apart from GPS. Using GPS+Glonass+Galileo you will get much better result.
No , After averaging setting I pressed (save position to manual button . so it turned to manual " No re -averaging"
Also the setting in the surveys were in the presence of almost all satellites.(Please see the pictures in the last topic i screened all setting (Different Fix Lat&Lng in the same Position!)
When I saw it was very bad and some users recommended that we reduce the rate and the number of systems to enhance the output , I limited it to GPS and SPAS .
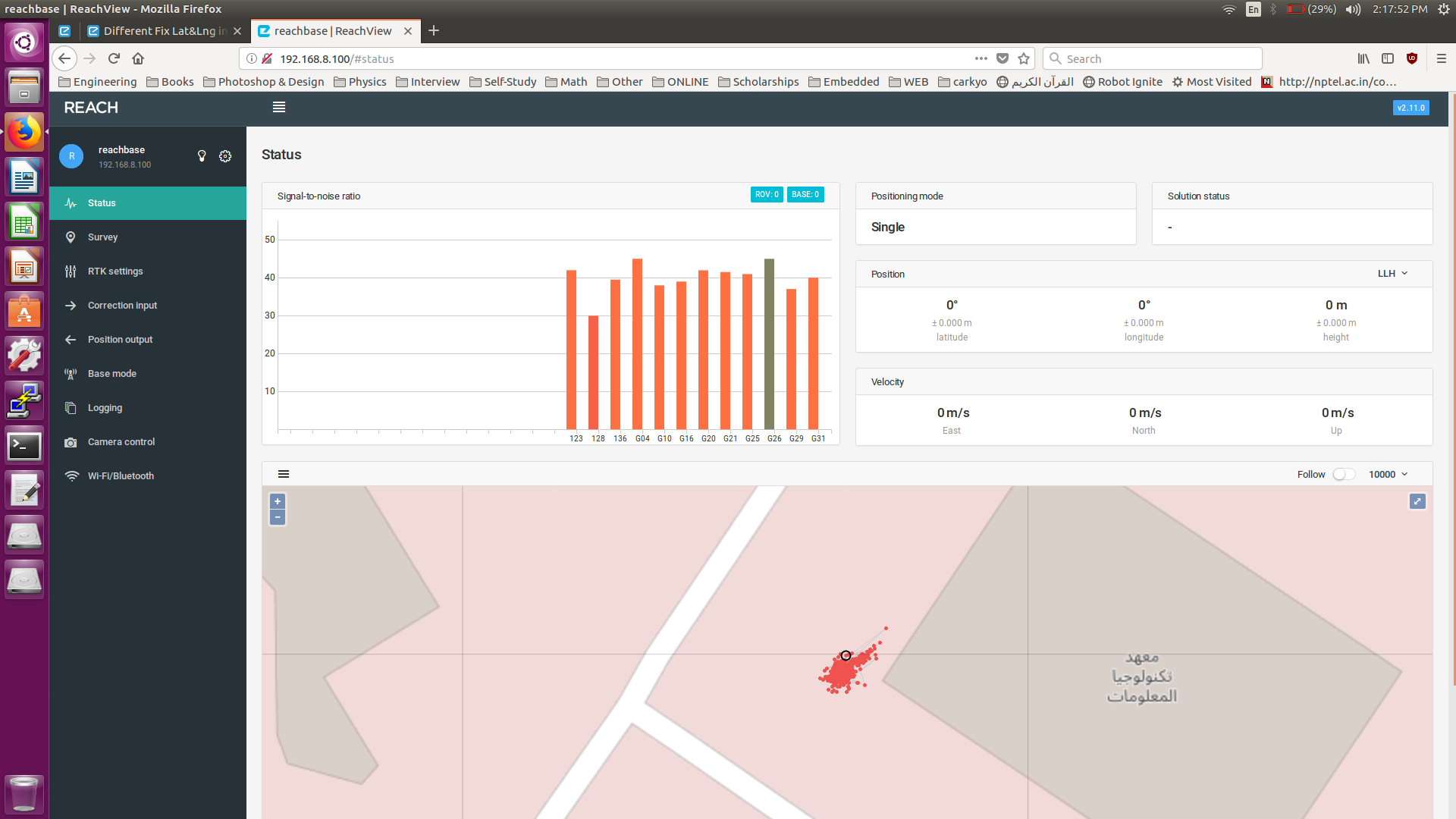
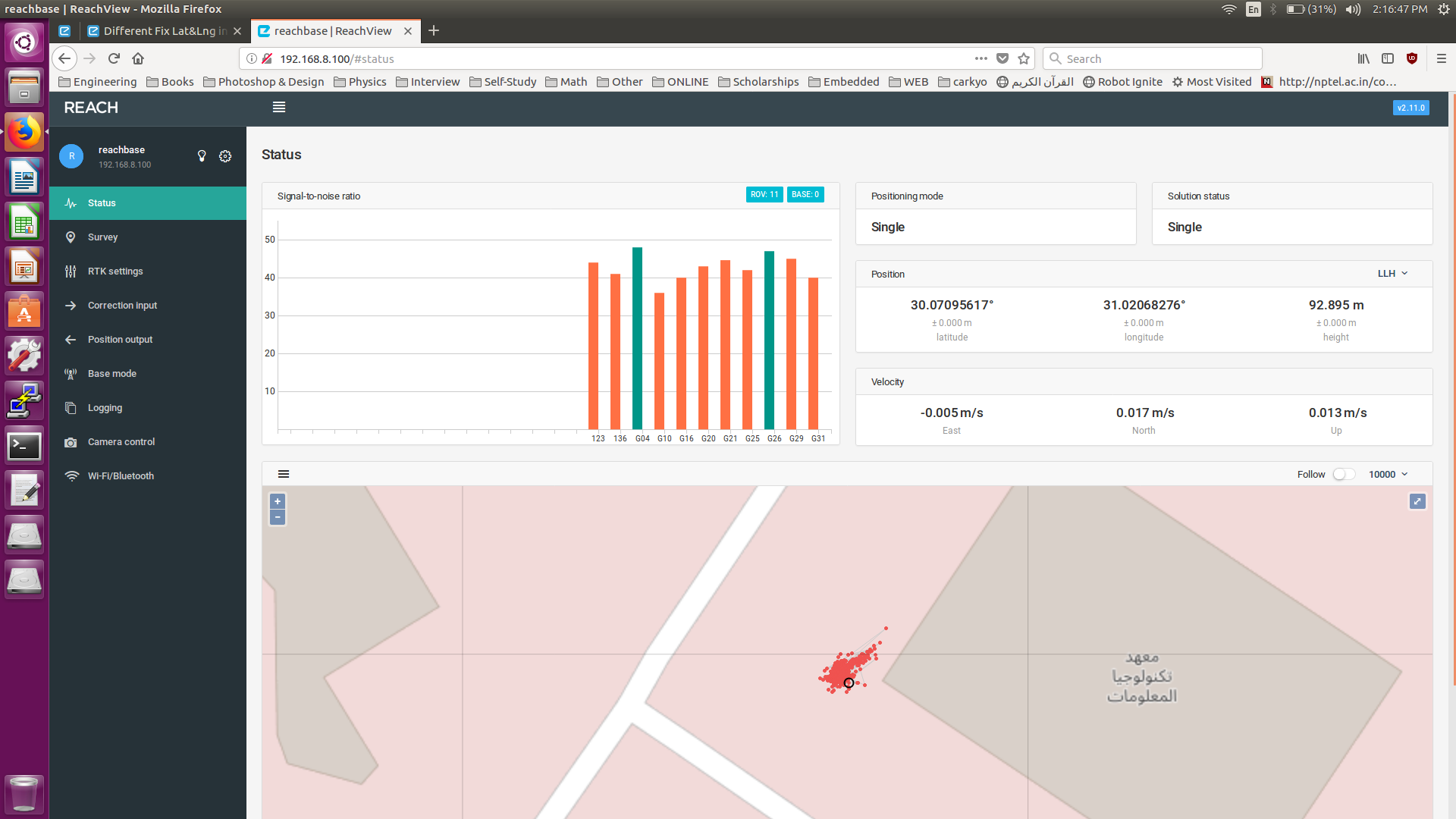
Also . I don’t know if my current base SNR good enough ??
These are screenshots of 2 samples in different time ( 5 minutes difference):