Hi all.
What settings in RTKPost would you recommend to “tighten” the solutions and get less false fixes? I would prefer to get more float solutions and discard them than to get fixes that are not correct.
Thanks in advance.
Hi all.
What settings in RTKPost would you recommend to “tighten” the solutions and get less false fixes? I would prefer to get more float solutions and discard them than to get fixes that are not correct.
Thanks in advance.
Increase your mask angle? 15-17deg maybe. What do you get then.
you could try switching from fix-and-hold to continuous
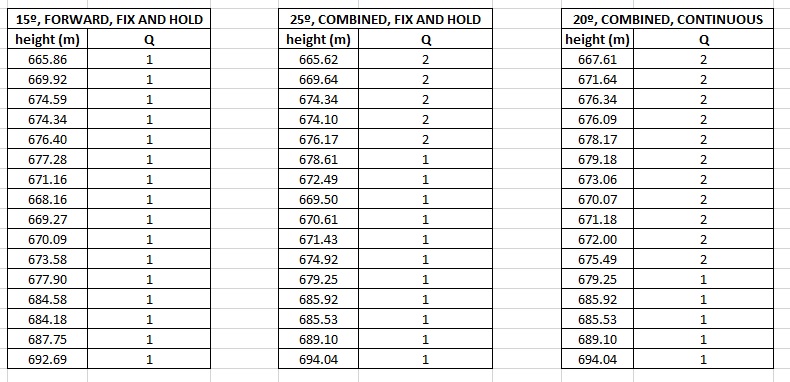
If I process with “Forward” I get all camera position fixes.
If I use “Combined” I get less fixes and for the same cameras that are fixed the coordinates are not the same.
If I use “Combined” but with “Continuous” in stead of “Fix and Hold” I get less fixes but the coordinates for the fixes with the previous process are the same.
I think I will use “Combined” and “Contonuous”.
The plane was 5km away from base. When the Rover is nearer, the results are better but for now It seems that I can´t get all Fixes at 5km or more.
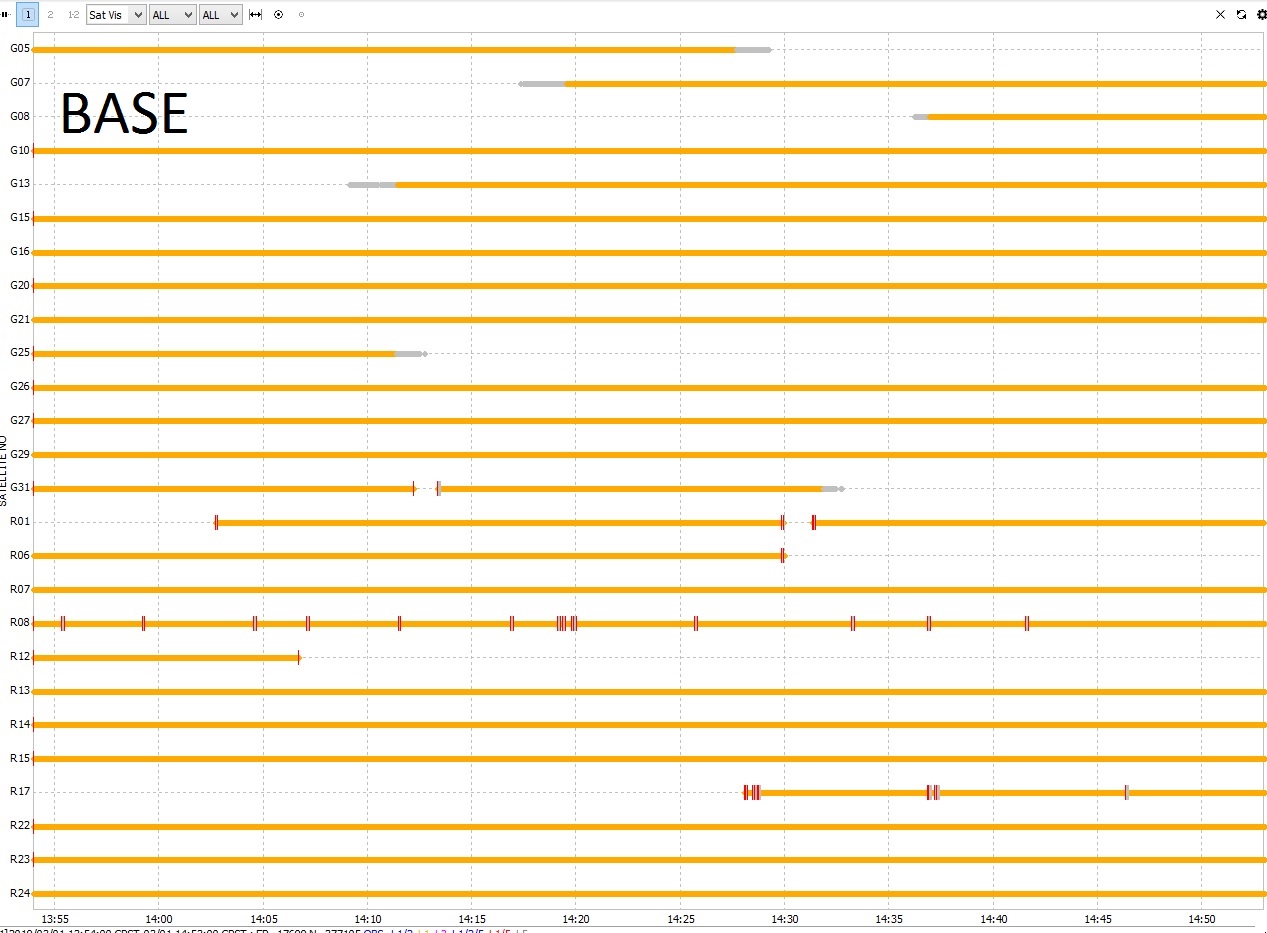
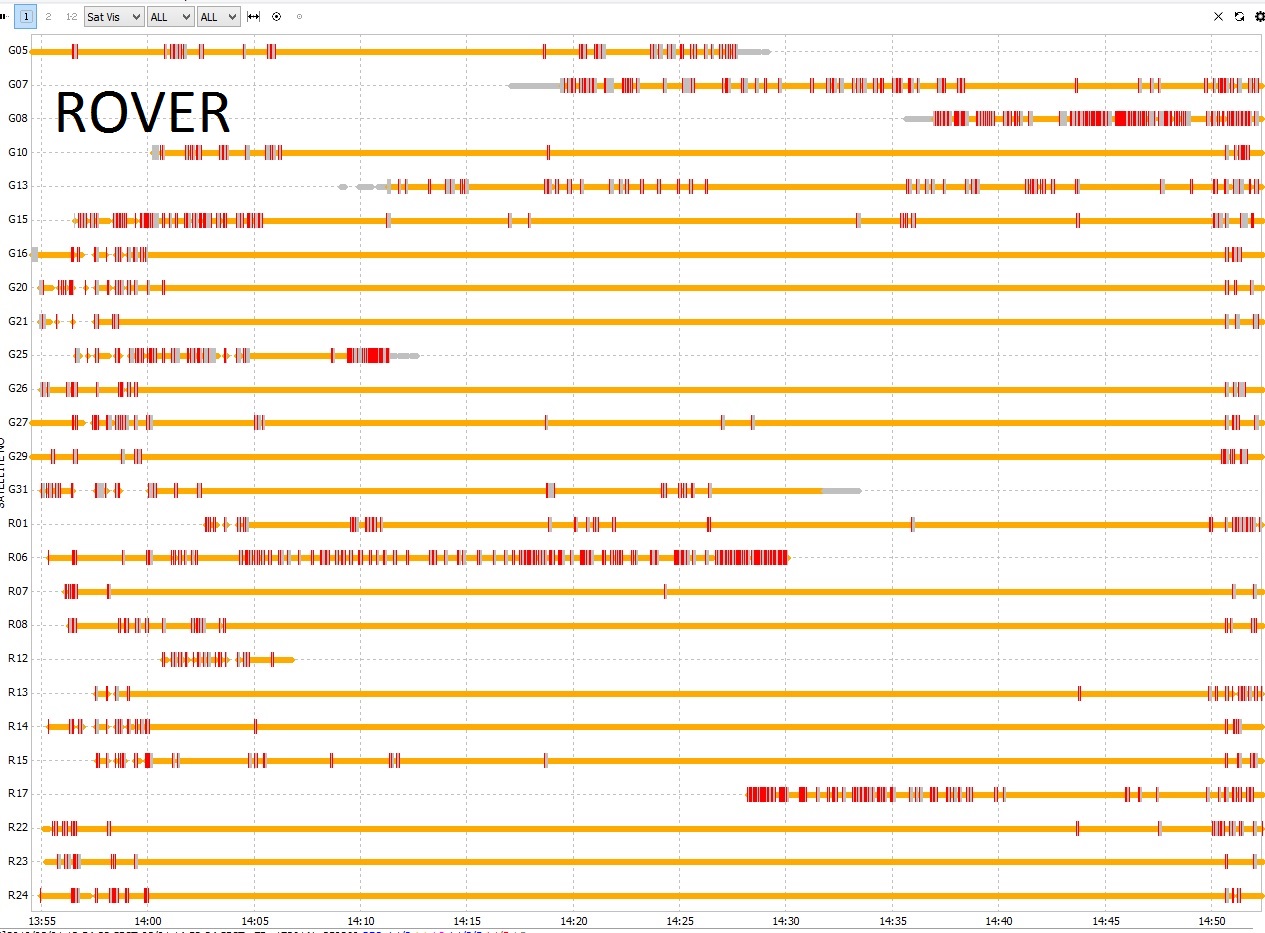
I notice that you don’t have any of the SBAS satellites in view. Did you have SBAS constallation enabled? If so, include SBAS in your processing.
What are your AR settings for Glonass? If “ON”, then try processing again with it “OFF” (or the opposite)
What model rover and receiver are you using?
Can you provide files for others to have a go with your data?
hi Michael how is it done to get a .pos file to read it from rtklib? I did it with PPP but when I read it I get an error and it does not process
Luis
I didn’t quite understand. Are you trying to create a POS, or are you trying to read in a POS for viewing?
I need to create a POS and then read to set the coordinates of the base in rtklib
If you have the base and rover OBS and the NAV from the rover you can run it through RTKPOST. If you just have the UBX you have to go through RTKCONV to get the OBS and NAV files.
I hope this helps a little.
if I understand that, but the language barrier is complicated for the question. Thank you
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.