



Latest Emlid Navio installed. Using Arducopter 3.6.5. Mission Planner 1.3.63. The I2C interface is activated in the Pi.
Have an external HMC5983 compass module installed on top of a mast to keep it away from other electronics on the quadcopter.
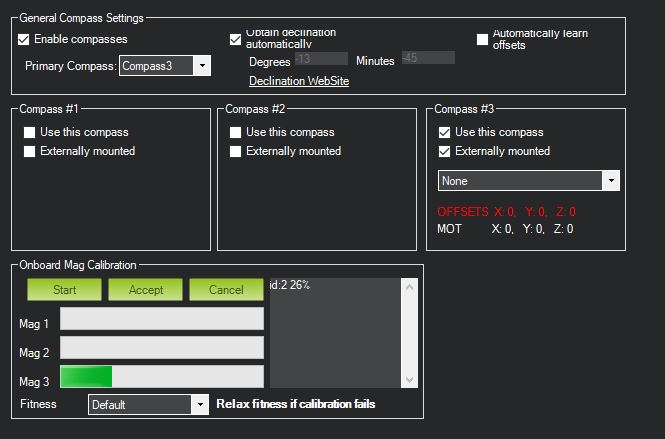
Selected Compass 3 (External) as the primary.
I cannot complete the compass calibration. Every time I try it begins normally but just stops updating midway through the process.
Is there any work-around for this?
Thanks,
Paul