I am having difficulty tuning my Navio2 Hexacopter for flight. After arming and advancing throttle to ~10% I experience near maximum motor spin – while in Stabilize mode. Additionally, I am experiencing a short delay (~500 ms) while rolling-off the throttle after this.
I feel that my problem is almost certainly related to the ArduCopter parameters.
My Configuration:
Hexa, T-Motor 400 MHz ESCs and Motors
Navio2 + Pi 3B, latest Emlid Raspbian and 3.4.6 firmware
Started from default ArduCopter parameters – i.e. did not import any
Using QGroundControl (Android) and APM Planner 2 (Linux)
The reason I don’t think the problem is related to anything in hardware is because when I reboot the controller in ESC calibration mode the throttle input is linear. It advances in the fashion that you would expect – and also don’t have the roll-off delay.
Hopefully an ArduPilot expert can suggest some parameters that might cause these problem(s) to occur. I can upload a video of the incident if it helps, but I think that the description is clear.
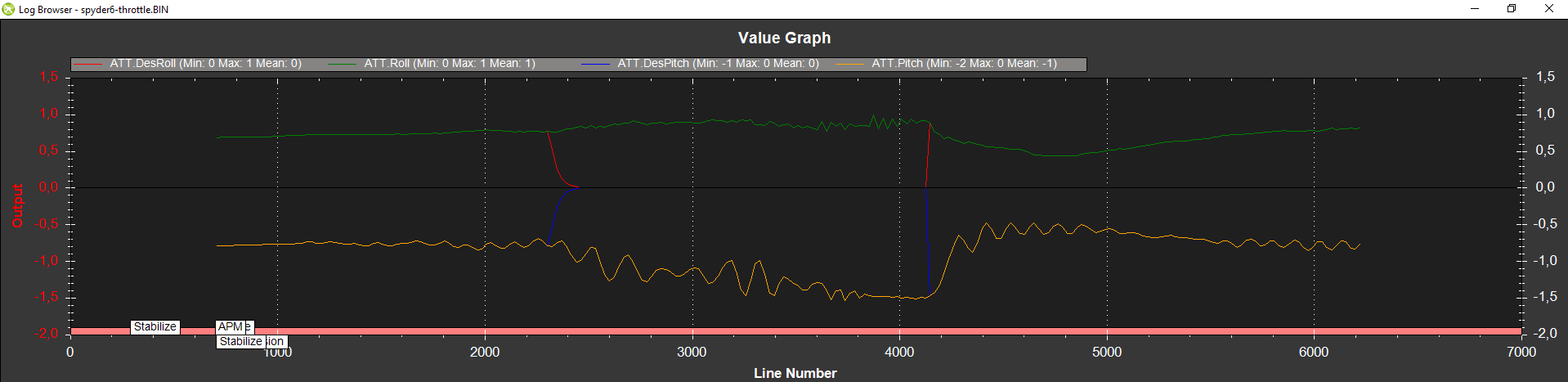
The following graph shows the issue that I am experiencing. There are three plots in it: blue for voltage; green for throttle input; red for servo output.
The voltage is probably not important, but it does show the expected sag while the motors are running. The servo output is limited to servo_1 to keep the graph cleaner – they all seem to be synching anyway.
From left to right the graph shows: 1) copter disarmed; 2) copter armed; 3) three tiny blips of throttle input; 4) copter still armed – but no input; 5) coptered disarmed again; 6) full throttle input during disarm – just to show you what full looks like.
What this graph is showing is that with ~5% throttle input the motors are spinning at over 50%.
The following is a video of my drone in ESC calibration mode and “good” throttle / motor control. This is followed by non-ESC calibration mode and “bad” throttle / motor control – like you saw in the graph.
(Note: I apologize for cutting off the throttle input during the video. I shot it with a GoPro and you cannot quite see it. You can trust me that I move between 0% throttle and 5% throttle during the times that you expect.)
The following are the ESCs that I am using – in case that matters.
Thank you for the report, but we still need a log file to deeply analise the issue. May be your copter has a normal behavior. Do you think that the copter will take off without the fixture with low throttle?
The following is a log file of brief run-up of my copter. It consists of power-on, arm, light throttle, throttle off, disarm and power-off. It exhibited the problems described previously.
As for your will it take-off question: I feel that it is possible that it would flip. I’ve used this copter (frame, ESCs, motors, props) before with a Pixhawk and it never felt this out of control prior to lift-off.
Hopefully you see something out of the ordinary in the logs.
Are you sure that ESCs are connected correctly?
I have one assumption. On the video I could see that the copter was fixed very strongly. And log shows that copter is trying to stabilise itself, but can’t do it. As a result it try to increase rotational speed of motors.
You may try to fasten the copter more freely, for example with 2-3 cm clearance.
If the ESCs were installed incorrectly then I would imagine the ESC calibration portion of the video would have showed a problem. Just in case they are the source of the problem I will describe my ESC connection setup below.
The ESC motor-power is connected via a harness down from the Emlid power module.
The ESC data is connected to the Navio 2 servo rail: #2, #3, #4, #5, #6, #7
The ESC data-power should be coming from the receiver. It is a PPM converter on servo rail #1.
(As an aside question, QGroundControl seems to refer to the Emlid power module as “Power Module 90A”; is this correct?)
And log shows that copter is trying to stabilise itself, but can’t do it.
The attitude indicator in QGroundControl shows the copter as very close to neutral in all attitudes. This is the first reason that I feel that the problem is not the copter attitude.
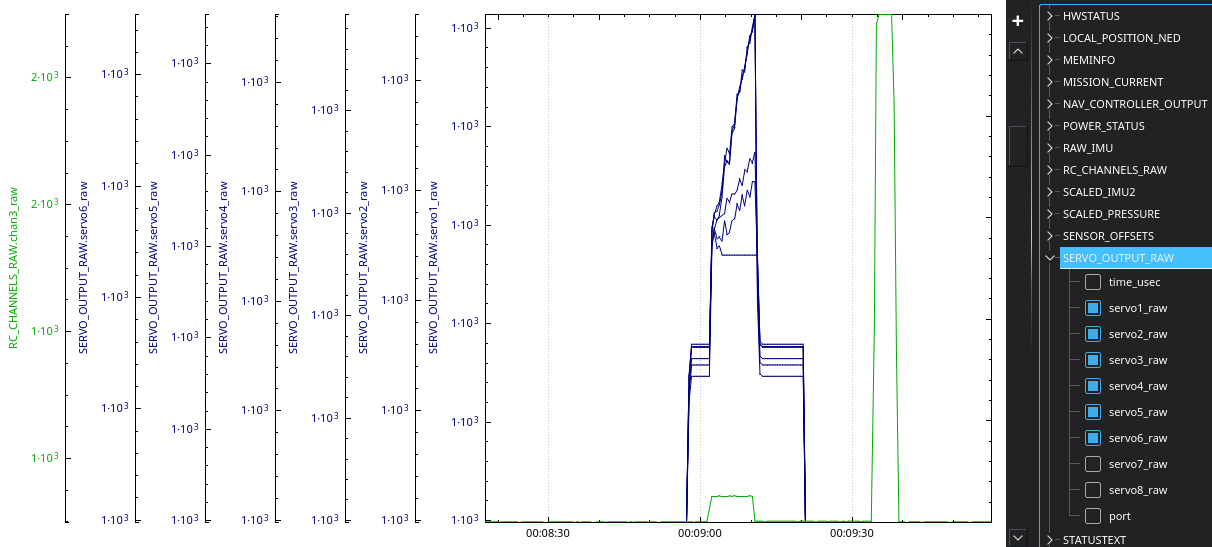
The second reason is that all props appear to be spinning at the same speed. If it was attempting to right itself they would not all be synchronized. Below is a graph of throttle versus all six servo outputs – which is showing that they are all pretty active.
I feel like there is a gain parameter somewhere in ArduCopter that I have accidentally maxed. Something like MOT_THST_EXPO seems like a candidate, but it didn’t help.
Because I was getting nowhere on this issue I took all of the electrical components off the drone apart and reconnected them. I reconfigured the ESCs while I was at it. I also setup a fresh Emlid-Raspbian with default parameters.
Early (but NOT comprehensive) testing is positive. I’ll get back to when I get time to test it further.
(The unfortunate thing about trying to solve things this way is that I have no idea what wasn’t working.)
I finally got a chance to test the drone and it appears to be running fine now. I don’t know what I did differently in the re-build, but it made a huge difference.
It is unfortunate that there is very little to learn from this thread, but sometimes that happens. Thanks for all of your help.