



Hi All,
We are interested in using the Reach’s on-board our multirotor UAVs. One of the main applications will be coupling the Reach to a machine vision camera used to determine high frequency camera orientations via SfM for a push-broom scanner. We need to log the camera triggering at 20hz.
What is the maximum event logging frequency and minimum interval between 2 events?
Cheers.
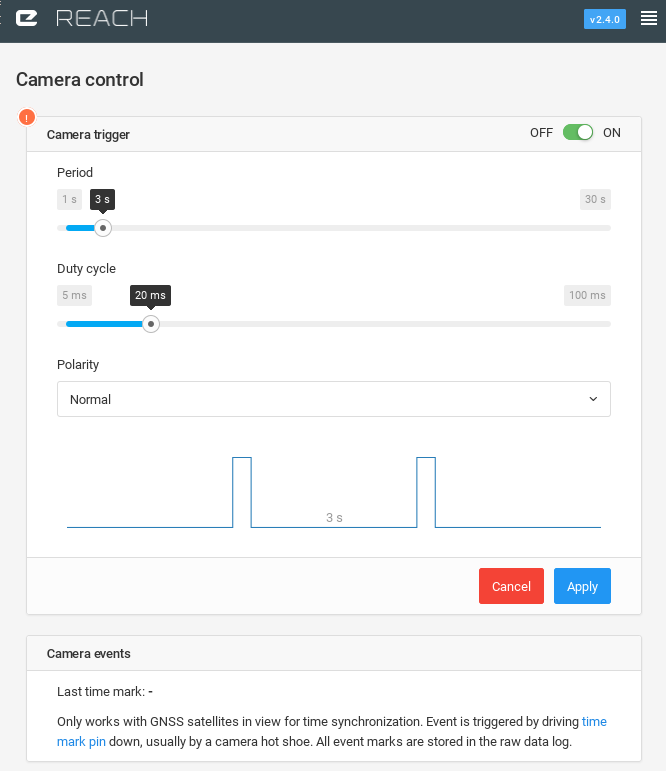
Since nobody else replied, I will say that in-app (version 2.4.0), the max camera trigger frequency is 1Hz, but I do not know know what the hardware limitations are.
Thanks for your reply bide.
I’m not really interested in camera triggering though, this will be set using the camera’s config software and will be started in the pre-flight set up. What I’m really interested in is the logging of camera triggering events, so I’d like to know the maximum event logging frequency of the ‘camera events’ in documentation you attached above, and what the minimum frequency between successive camera events.
Cheers
Triggering the external interrupt of the u-blox chip can trigger a time mark message to be output.
Unfortunately, I have read that the chip can produce only 1 time mark message output per epoch, and if you use the GPS constellation only, then the max is currently 14Hz. So 14Hz is the max speed for timing messages also.
However, the resolution of the time stamp within the time mark message is 21ns (or ~48kHz), so it will be very precise.
Also of note: I think the pulse needs to be held high or low for >50ns.
Maybe you could operate Reach at 14Hz, [divide the frequency](http://www.electronics-tutorials.ws/counter/count_1.html) pulse from your scanner in half to 10Hz, and then interpolate the resulting messages back to 20Hz? > t2 - t1 = delta-t t1.5 = t1 + (delta-t / 2)
1 Like
Thanks bide.
I think we can definitely work with a 14Hz frequency, 20Hz is the upper limit.
In the same way you suggest to interpolate the time marks to 20Hz, we thought we could do the same with the orientations of our pushbroom scanner determined from SfM. I guess we can try both.
Cheers