My drone is assembled and right now I’m dealing with calibration and tests. There is one thing that doesn’t convince me too much … is the estimation of absorbed current that I see in the .bin plots.
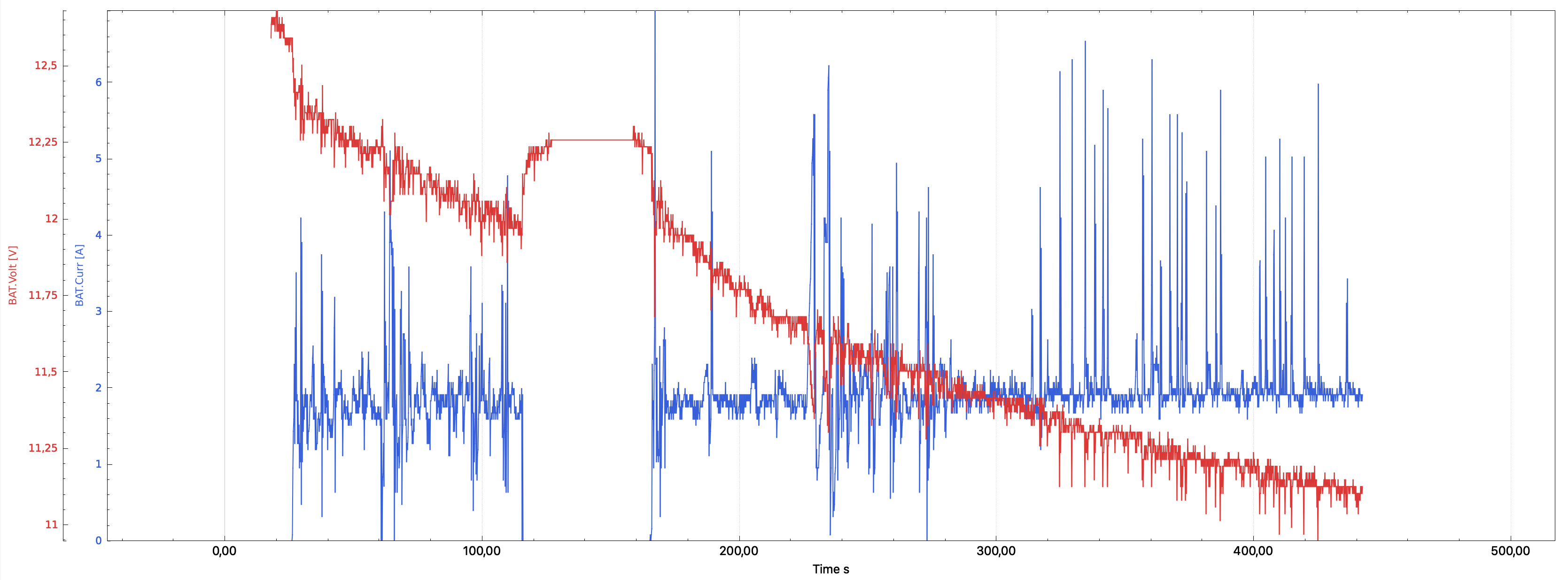
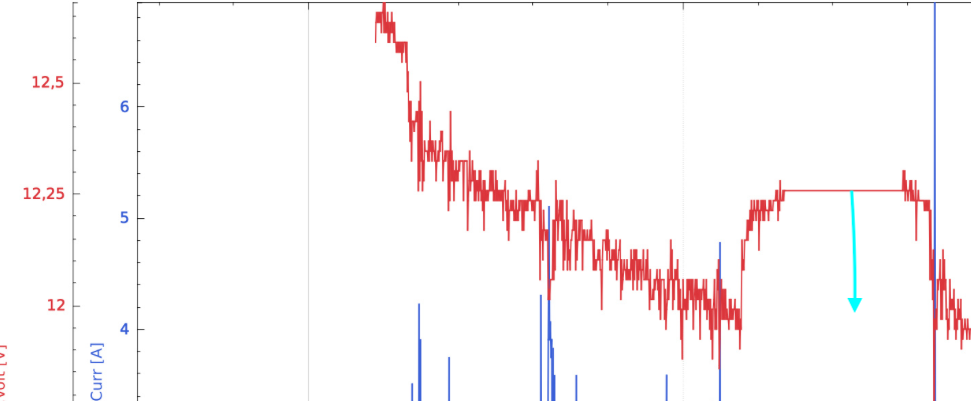
You can see the attached picture, where the BAT.Volt and Batt.Curr are shown from the log file .bin. The plot is very rough because I was doing calibration here … but as you can see the average current value is around 2A. This is the same current that I need to hover in AltHold mode.
If I understood correctly, this current info is sent to the NAVIO2 via the same plug that I use to power it up (via connections A0 and A1). This value of 2A should be the overall current drain from the battery … so by using a 1500mAh 3S battery, I thought the drone should fly ideally for 45 minutes (1.5Ah/2A=0.75hrs=45minutes)
In practice, I expect some losses but so far the battery cells go from 4.2V to 3.6V in less than 8 minutes. That doesn’t convince me too much …
The drone weight is 510 grams. Can you tell me what do you think about the picture below? Where is the mistake in the estimation?
Voltage calibration is easy, you plug, you do a voltage measure on the battery, you check if it is the same value in the Mission Planner HUD and you adjust the multiplier coefficient. (around -10%)
Amp calibration is more tricky with low values. If you do not have a way to measure the real Amp value, do a flight test with a fresh charged battery (6 or 9 or 10mn flight in hover), land, charge the battery and check how much Amp you put in it. Compare with your flight log and adjust. Multiplier coefficient for Amp is quite hight, so do not expect accurate reading with your configuration. A good time monitoring is better.
Your voltage drop is quite low (I experienced around 0.5 volt drop per cell with my larger configuration and 10C batteries).
Hello Marc
Interesting suggestion, thanks! I’ll do that on my next flight …
About your last sentence … what do you mean exactly? Do you mean the voltage is dropping too fast from 12.6V to 11V?
I did the test today … I flew for 6 minutes then charged the battery and I needed 1014mA to charge it back from 11,4V to 12,6V. From the ratio I derive that I need 170mA to hover each minute. So with a 1500mA battery used up to 80% (1200mA) I can basically hover for 1200/170=> around 7 minutes.
This is really low compared to what I was expecting …
The drone weights 550gr, motors are 2204 2750 kv with 5030 props and 35A 4in1 ESC.
What am I doing wrong? Could be that if I tune the drone in a better way I can achieve longer flight time? Or it’s just a matter of components that are not ideal for longer flight time?
Have you tried to calculate your drone configuration on eCalc that Marc shared above? It should help you in understanding how long you may expect the flight to continue.