I am totally new to building a drone, but I started working on constructing one with a Navio2 connected to the raspberry pi 3. Everything was working great: I could start ardupilot, connect to it through Qgroundcontrol and set up the sensor and motors that I had connected with no problems. I shorted the circuit at some point and messed up the Navio2. I ordered a new one and started setting it up again and ran into a few problems.
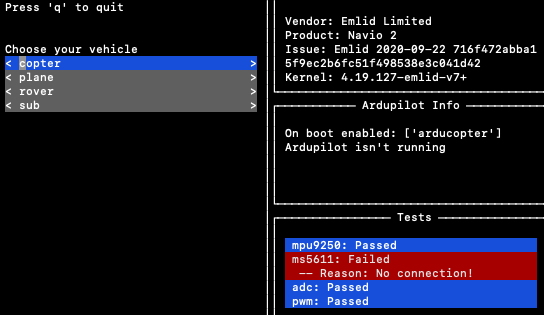
First, when I ssh to raspberry pi and run the “sudo emlidtool ardupilot” I get the error “ms5611: Failed-- Reason: No connection”. I don’t really know what this means but someone else on line had the same problem and reflashed the SD card. I tried that (a few times) and the problem persisted.
I then still tried to start arducopter and connect the raspberry pi to Qgroundcontrol. When I did so, I get the error “Vehicle not running the latest stable firmware! Running 4.0.3, latest stable 4.0.7”. I don’t really understand how this could be because the image I downloaded onto the SD card was the image on the Raspberry Pi configuration page of the Navio2 docs on the Emlid website.
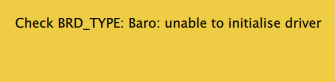
I can’t calibrate any sensors and sometimes there is some error about failing to initialize the driver.
You can disregard this message. It is relevant to other arducopter hardware users (like pixhawk family and you cannot update arducopter with the Ground station software). When accustomed to Raspberry/Navio/Raspbian there is a way to upgrade arducopter to latest stable version.
Check the seating of the Navio card other the Raspberry. You can apply manual pressure on the large plug to be sure all pins are really flush.
If you have a phone power bank available, use it to power the Raspberry when you are at home.
“Check the seating of the Navio card other the Raspberry. You can apply manual pressure on the large plug to be sure all pins are really flush”
I am not entirely sure what you mean by this but I checked that Navio2 was pressed down firmly on the pins (and tried with anther pin header and still had the same problem)
I tried powering it from a phone bank as well and still had the same problem.
This is the error get when I connect to qgroundcontrol (its probably the same problem… but I thought I would share in case it helps)
I reflashed the SD card again and have still had the same problem. I don’t really know what else to try.
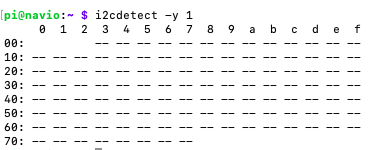
Could you please run the emlidtool test command in the terminal and post the output here? It might be useful for me to check the sensors’ test results once again.
I connected the Navio2 to a new raspberry pi and everything works now, so I think the problem was the Raspberry Pi not the Navio in the end… thanks for the help everyone though!