Hey, recently i’m trying to build new quadcopter on Raspberry Pi3 with Navio2.
And i have trouble with the distributed Navio2 Image.
I used Raspbian Jessie Image, which is “emlid-raspbian-20170323.img.xz”
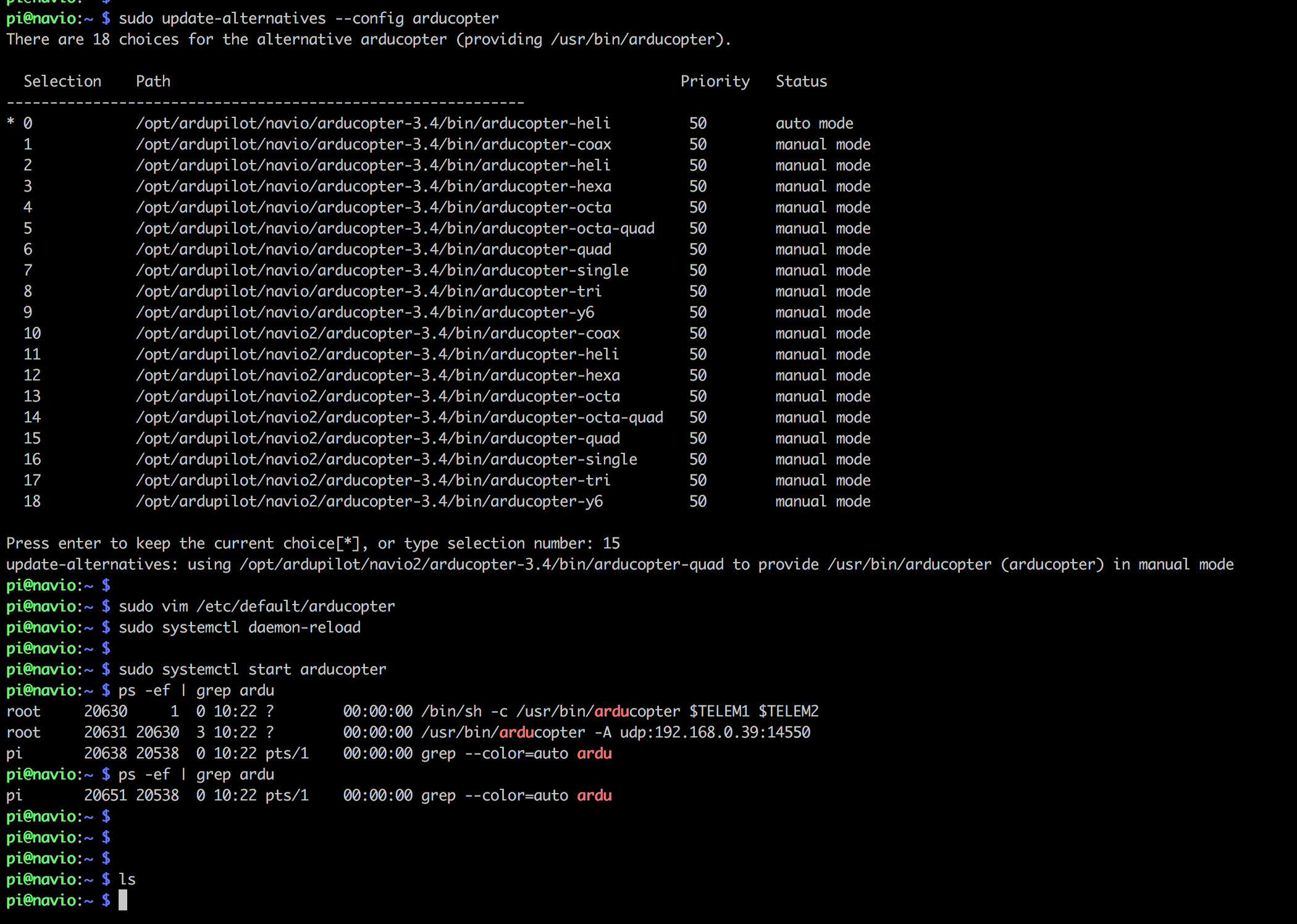
After i set my arducopter configuration and start the arducopter process.
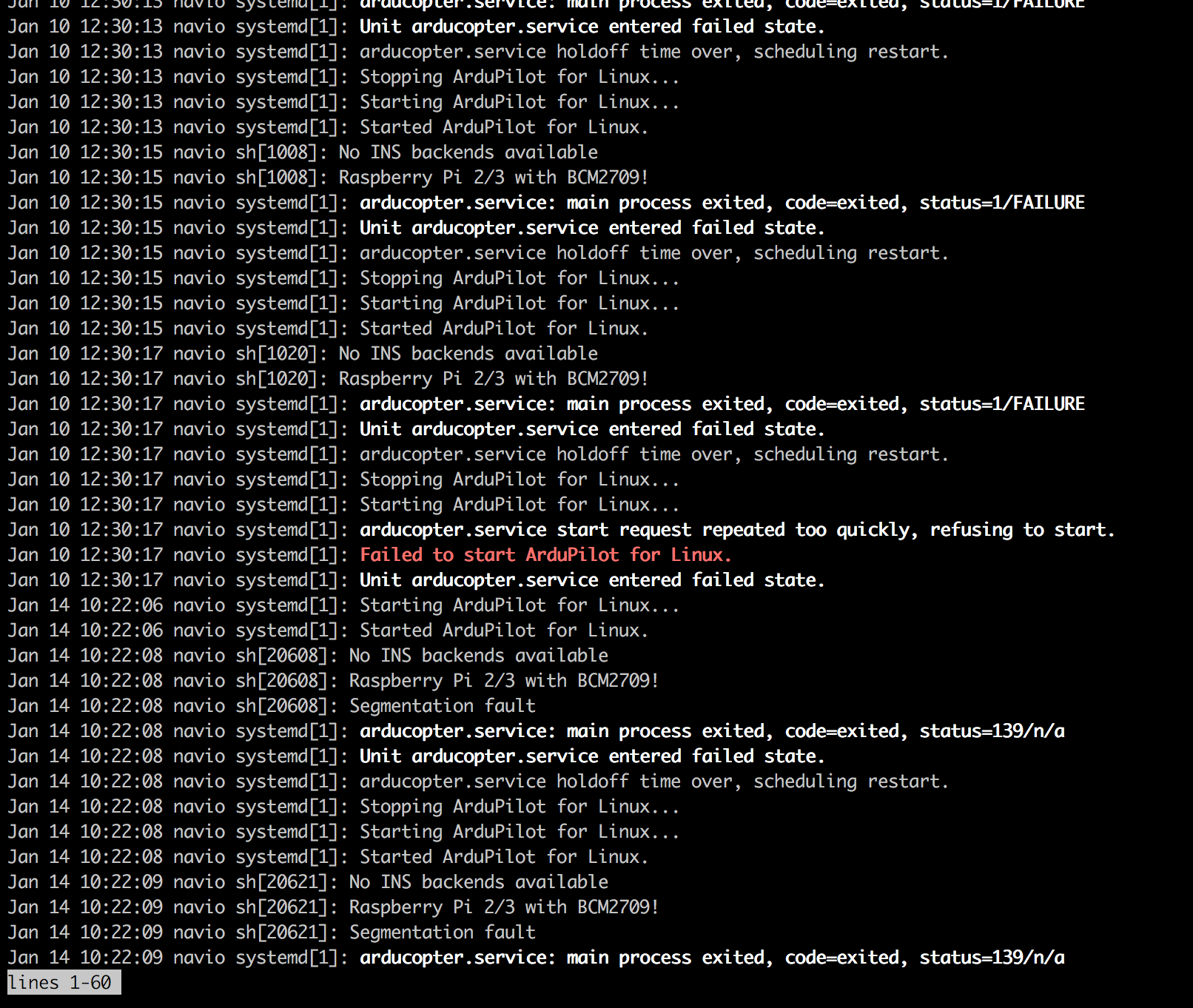
but then, after about 3 seconds later, arducopter process died.
I checked the configuration, but it did well.
I’m not sure what i should do with this.
Is this problem related to some topics about spi and rcinput in the other writing?
Is it okay with upgrading my image?
I saw the some writings here, but i can’t figure out the reason.
Yeah I connected the Receiver (D8R-XP) and ESCs to the navio shield.
But, i didn’t give power to the ESCs only to Raspberry Pi board.
Is that related to this?
I made several drones and it did well without power to the ESCs when calibrating.
Anyway, is there no problem with the image being distributed now?
I think it could be some hardware problem.
I don’t remember what INS is, but probably some sensors for the drone, right?
if the other guys have no problem in using the distributed images, i think it could be the hardware problem.
And i already upgrade my image with your advice on other article.
When i run sudo emlidtool , it just printed out the manual.
After i upgrade the board, i can’t access with ssh now.
Hello, Thank you very much, staroselskiy.
Due to your advice, i figure out the problem with our drone.
My colleague made new drone, and i check it out today.
As you said, No INS error message is critical.
So, i expect that there’s something wrong with the hardware part.
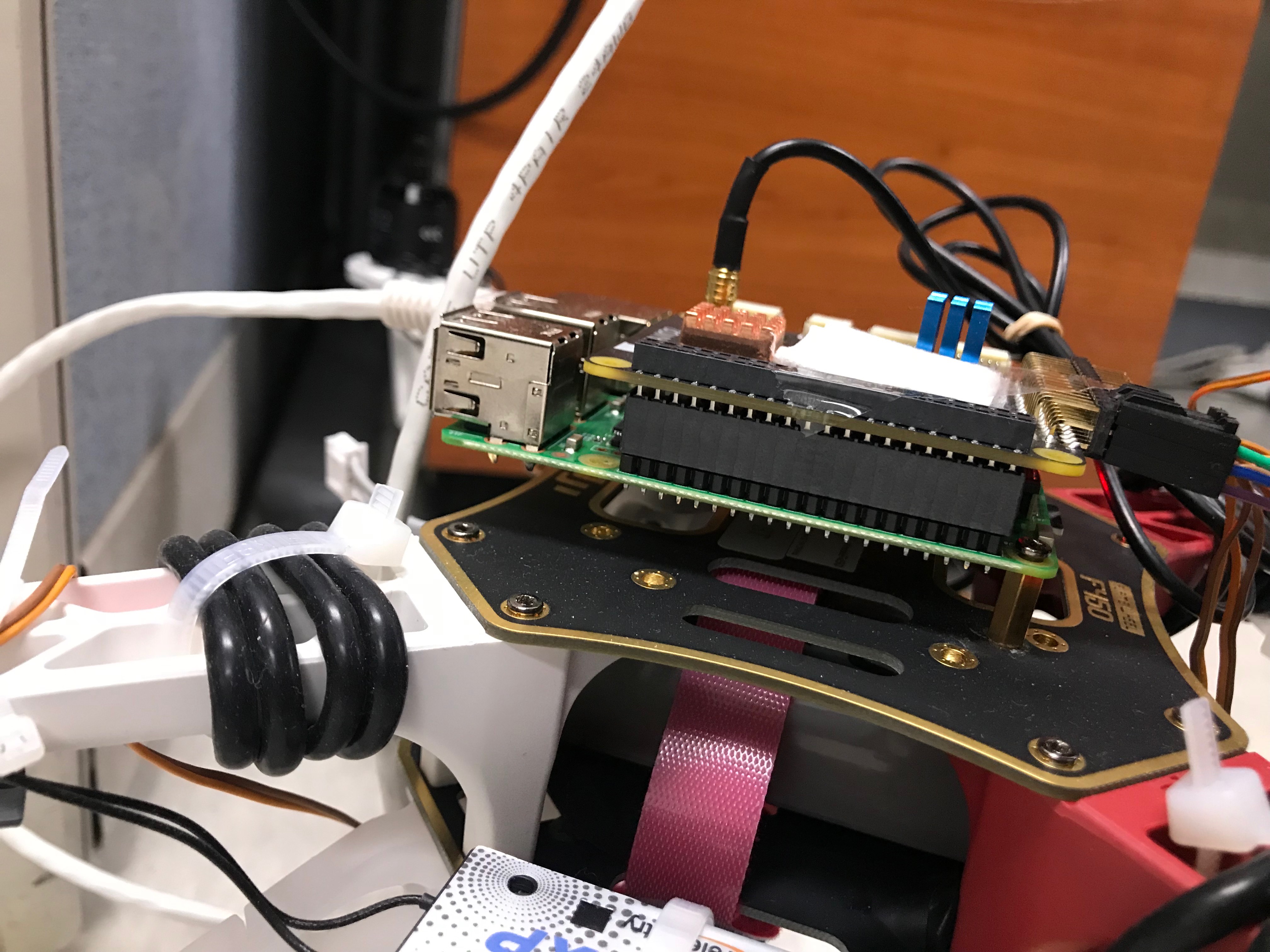
I checked the hardware my colleague made, and i found that the Navio2 shield was not locked hard.
After i made it correct, it works well now.
Thank you for your advice
I think after Navio shield changed to Navio2,
there are many issues with the hardware (People do not assemble the shield tight).
I think someone who are under the trouble with Navio2, check the hardware first.