I read the docs again and I think the problem is that the instructions refer to ardupilot instead of arducopter, arduplane or ardurover.
Here:
Running ardupilot
Let’s run ArduPilot in another pane as stated in here pointing telemetry to 127.0.0.1:14650 by modifying /etc/default/ardupilot:
sudo nano /etc/default/ardupilot
modyfying
Then type:
pi@navio: ~ $ sudo systemctl start ardupilot
This command launches ArduPilot (one-shot. sudo systemctl enable ardupilot to make it persistent). You’ll see your LED blinking.
In case you make changes in ardupilot while it’s working, you should then restart:
pi@navio: ~ $ sudo systemctl restart ardupilot
Continue watching the tutorial for this step.
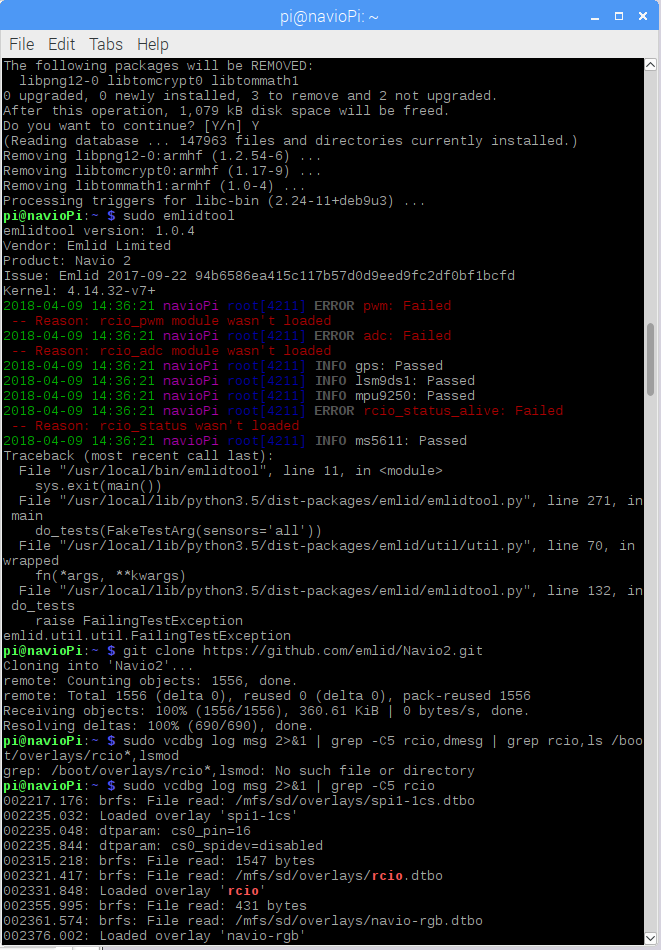
Sorry to bother again, it is not working again. This happened after I enabled raspberry pi camera as /dev/video0 using $ sudo modprobe bcm2835-v4l2 # to load it and create /dev/video0
then when I try running emlidtool or start arducopter it will not work.