I’ve been trying to use CH8 in PassThru mode (to check out undercarriage motors). As soon as I click Write Parameters in Mission Planner after changing RC8_FUNCTION the motors move randomly in jerky motions.
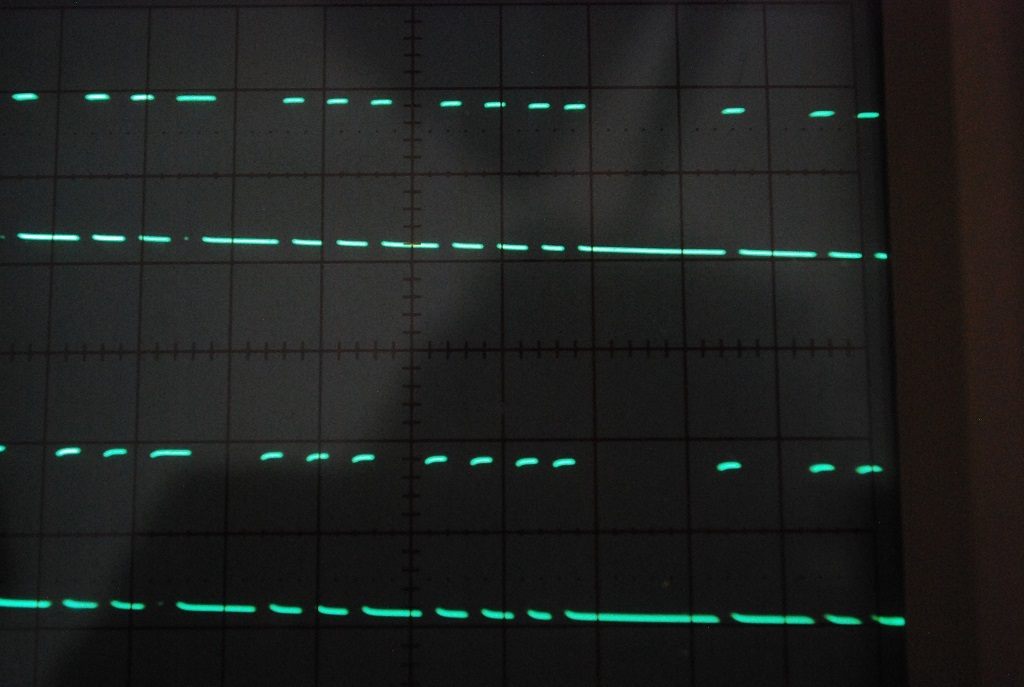
The chout numbers in Mission Planner are dead stable. Navio2 outputs for ch8(top) and ch4 look like
By motors you mean servos? If so, then the issue is that they are not 400Hz PWM compatible. We are working on an update for Navio2 that will allow 50Hz output on 10ch-14ch, that should be ready in about 2 weeks.
Sorry, I haven’t explained myself very well. I’m building a quad copter so when I said “motor” I meant the prop motors/esc, and the undercarriage is, as you say, a servo.
I now understand that the undercarriage servo may not be impressed with a 400Hz input - thanks for that, I’m on a very steep learning curve!!
However my original point was that the prop motors moved erratically when CH8 was enabled, and I assumed that was related to the PWM signal from the Navio2 having pulses missing (photo in previous post).
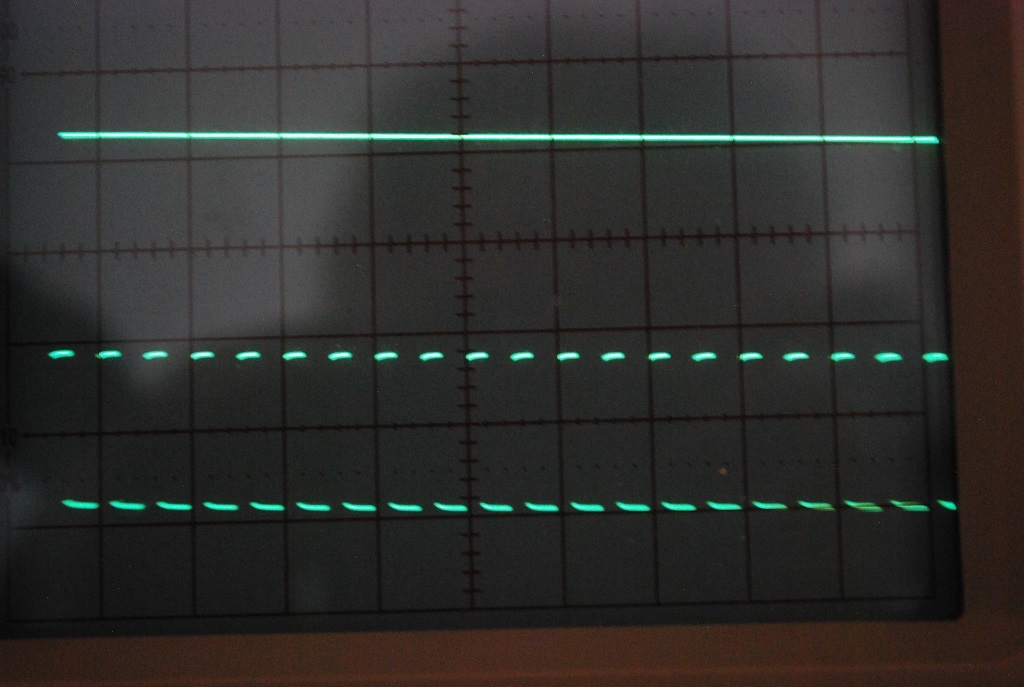
As soon as CH8 is disabled, the signals appear “normal” (photo below) with no pulses missing.
This will be fixed. We are currently focused on bringing out a new image that will support Rpi2/3 Navio+/2 and auto updates. After that we will get back to this issue and the one related to servo frequency.




 Thanks for the report, I completely understand that it was hard to find in the forums.
Thanks for the report, I completely understand that it was hard to find in the forums.