



Epic fail this morning… still in mourning ![]() Epic fail this morning… still in mourning
Epic fail this morning… still in mourning
Thankfully the craft crashed near by and was easily found due to its motors that just would not shut off. I dumped the throttle as soon as it jumped, but as you can it did no good.
I’d be very happy to upload my logs, but I have no clue as how to do so; if someone has a dummies guide to log locating/retrieval and wouldn’t mind offering a hand, that’d be great.
Luckily the only real damage seems to be the GPS puck that got cut & tossed. 3 out of 6 broken arms… and that’s about it. Thinking that I’m going to replace the GPS puck with a 3dr gps/compass, but I am curious as to how one connects the gps with telm & osd already on the uart port.
It is always painful to watch a video like this. I hope you get your copter repaired soon!
First thing I noticed is, your copter seems to have a lot of vibrations. Balance your motors, your props and both together, it will help a lot. There are plenty of tutorials on youtube etc. where you can see how to do it.
Dataflash logs are written to the SD card under /var/APM/logs. I use WinSCP to download them to my PC. If you zip them you can upload the logs with no problem.
You can always use an USB to UART adapter to get more UART ports. They are cheap:
@jlrogers2 logs are located in /var/APM/logs directory on your Raspberry. Please copy them to your computer and then upload here, we’ll take a look.
1.BIN (145.3 KB)
4.BIN (181.2 KB)
3.BIN (233.2 KB)
2.BIN (773.4 KB)
5.BIN (964 KB)
6.BIN (1.1 MB)
So here’s the flight logs from yesterdays event. I would have uploaded them sooner, but I felt a need for a 24 hour break  I had reverted back to the 3.4-unstable after incurring too many flight stability issues with 3.4-rc1.
I had reverted back to the 3.4-unstable after incurring too many flight stability issues with 3.4-rc1.
While I’m certainly looking forward to getting the Navio 2 flight ready again, I will NOT be taking it up again until Emlid comes up with a stable solution for their flight software; everything was great up until the latest update, and after spending a week fighting with the 3.4-rc1 update, I felt that taking a step back to 3.4-unstable would be the answer that I sought. Given that it was not, is there a version prior to 3.4-unstable that I might be able to make use of? Or better question, is there an upcoming update in the works?
I’d be happy up upload the flight logs from the 3.4-rc1 installation if that would assist with understanding the issues that I was having that lead to my decision to downgrade to 3.4-unstable.
Hi Joseph,
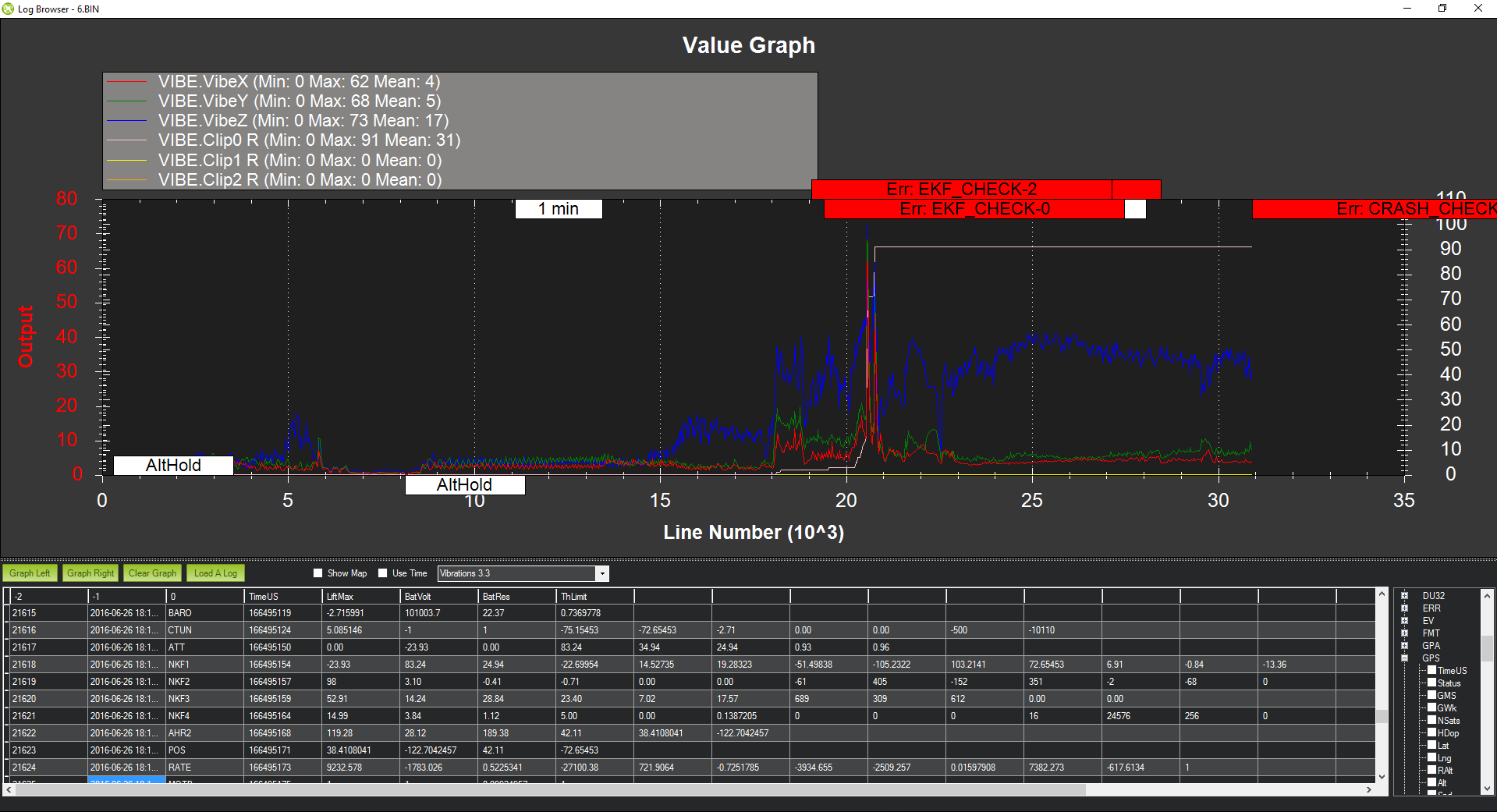
Sorry about what happened. We have looked through your logs today and noticed a few things that could have lead to the crash:
- You have really high vibrations and after takeoff accelerometers are clipping (hitting the maximum value). You should balance your motors, props and consider using anti-vibration mount. Related wiki.
- Two compasses do not match, which means that you did not set correct orientation for the internal one. While there is no need to set anything in RC1, in previous version you should set ROLL to 180 for compass 2.

It is very likely that high vibrations led to the crash, we did not find any other explanation so far.
1 Like
Right on! Thank you for taking the time to look over the flight logs. I thought that I had actually disabled the second compass. For an anti vibration mount I’m using Kyosho Z8006 Zeal Vibration Absorption Sheet, using 1/4" cubes in each corner of the RPi3 case.
Now here’s my next question, as a result of the crash I’m going to have to replace the GPS puck. I’ve read of other users having positive results with a 3dr gps/compass module. I’ve read that having the compass on board the FC can be a bad idea due to EMF interference. What are your thoughts on this? Do you think that there is validity to having the compass off board as part of the GPS, or would you recommend just sticking with the GPS/GNSS antenna MCX?
First and foremost, get rid of the vibrations. Even the Kyosho foam cannot do magic. You need to balance the props and then the motors.
Then fly in STAB mode only, see if it flies stable, download the logs and check them for vibes.
NOW worry about the compass. Yes, getting an external compass (whether inside the 3dr puck or just the compass like this: Compass Module - HMC6352 - SEN-07915 - SparkFun Electronics is essential.
Disable the onboard compasses, make sure the external compass is mounted on top of a pole (10cm is usually fine), make sure you have the orientation correct in MP, run the calibration AND run a CompassMot AC3.0 CompassMot Setup - YouTube
Finally, make sure your barometer is covered properly with foam.
Now you can go for a test flight and try loiter.
3 Likes
Thanks for the feed back @markvanhaze. While I totally agree that vibrations were a key factor in this crash, I’ve actually had many successful flights with this craft over the last few months and have covered well over 200km in AltHold, Loiter & Stabilize modes. Hell, a week before the update I had finally achieved a top speed of 95km/h, which for the F550 hexa I was quite impressed. The root of my problems started with 3.4-rc1, hence why I had reverted to 3.4-unstable.
I have a larger quad that I plan to move the Navio2 into; one which I’ve previously had many successful/stable flights with a Naza M V2. I think that I am going to order the 3dr gps/compass and proceed from there. This time around thought I’m going to take my time and not force the craft into the air if it seems to be having issues.
Thanks again everyone for the very helpful feedback & support. Looking forward to getting the Navio2 flight worthy again.
Good recommendation! But, external compass is not essential, it would never hurt, but there are plenty of builds that fly well on the internal ones. It pretty much depends on a build.
1 Like