



I mean, could Emlid Studio shows info about the observation file like in other software:
Once you upload the log to the Rover section, you’ll see the corresponding start and end time in the Settings -> Logs duration. It helps easily crop the logs to the desired borders.
2 Likes
Could we do this crop thing with Base log file too?
If the Logs duration is set, Emlid Studio will process only the base and rover data related to the selected period. So, it’s enough to choose it once for all the data.
Hello, I’m attempting to use Emlid Studio for the purpose of PPK of drone imagery. The drone is an Autel Evo2 RTK. Along with the image set, it records 2 text files.
rinex.obs
timestamp.mrk
I have downloaded a rinex file from the CORS station for the epoch of the flight. In Studio, I can enter the .obs file from the drone, and the the observation file (.21o) from the CORS station.
Those are the only 3 files I have. Is the drone supposed to be outputting another (navigation) file? Or, is the .mrk file just not in a format that Studio can recognize? ( I’ve attached all 3 files here).
Thanks for your help!
Dave
files.zip (8.8 MB)
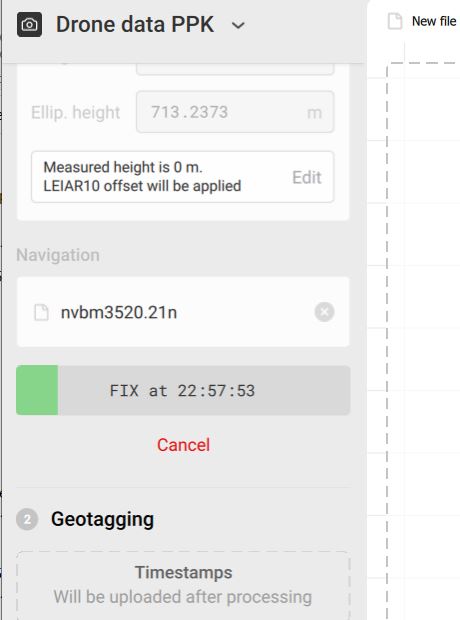
UPDATE I have found that if i add a nav file from the CORS station (.21n file) , then the process will run. Studio generates a .pos file which maybe takes the place of the .mrk ??
But, after that, it will not accept any photos and in fact asks for different files?
I understand this is beta software. Is there anything you can see that I’m doing incorrectly?
Thanks!

Hi Dave,
Our RTK modules save a time mark for each photo directly in the RINEX log. Emlid Studio uses these time marks in Drone data PPK to calculate accurate image centers. In your case, the time marks are saved in a separate file, so the software doesn’t recognize them.
As I know, some RTK drones support real-time photos georeferencing. If it’s possible to work with your drone this way, you can transmit base corrections to it in RTK. We’ve tested Reach RS2 sending corrections to DJI Phantom 4 RTK via NTRIP. Possibly, a similar setup will work for you and you won’t need to post-process the data at all.
Hi Ksenilla,
RTK is an option with the drone. PPK is desirable in rural areas and also if there is a interruption of signal to the drone and real-time corrections fail. PPK is always a fall back option. Maybe your engineers can add an option to read timings from the .MRK file as it is a simple txt file. (example in my previous post)
Thank you!
Dave
4 Likes
Hi Dave,
Well, it’s not a usual workflow for our devices, but I agree PPK with an RTK drone can be helpful in the ways you describe it. I’ll talk with the team about your suggestion. Thanks for sharing your thoughts!
3 Likes
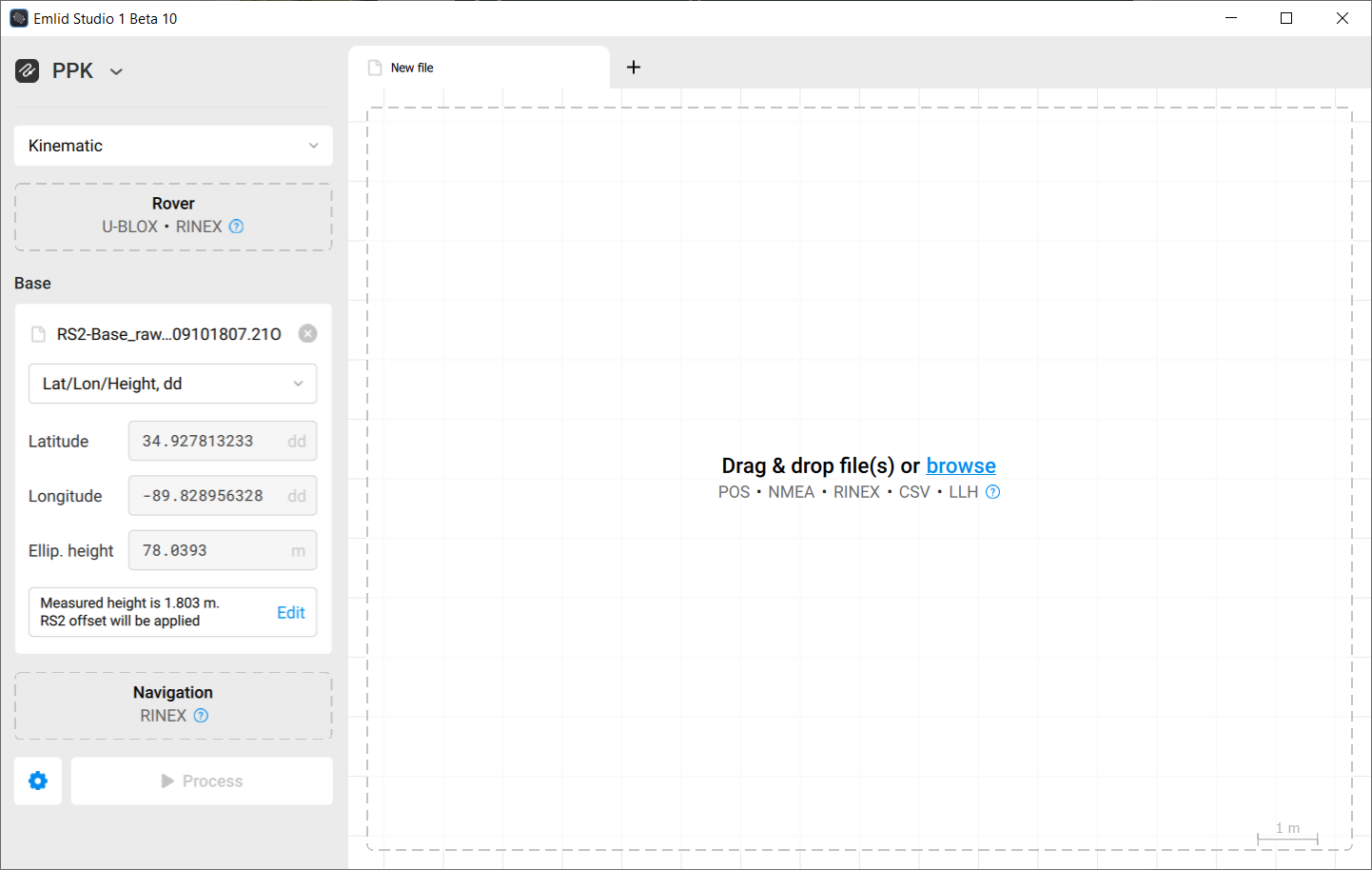
After Studio has processed my RS2 Base using a CORS log file, I then start a new process using the RS2 Base as the BASE unit for my RS2 Rover. When I change it from RINEX Header to DD or DMS, can someone tell me where it is pulling that data from? It is auto populating the updated PPK coordinates but I can’t figure out where it is pulling it from?? I thought it was the POS file but when I delete the POS file the correct data is still populated.
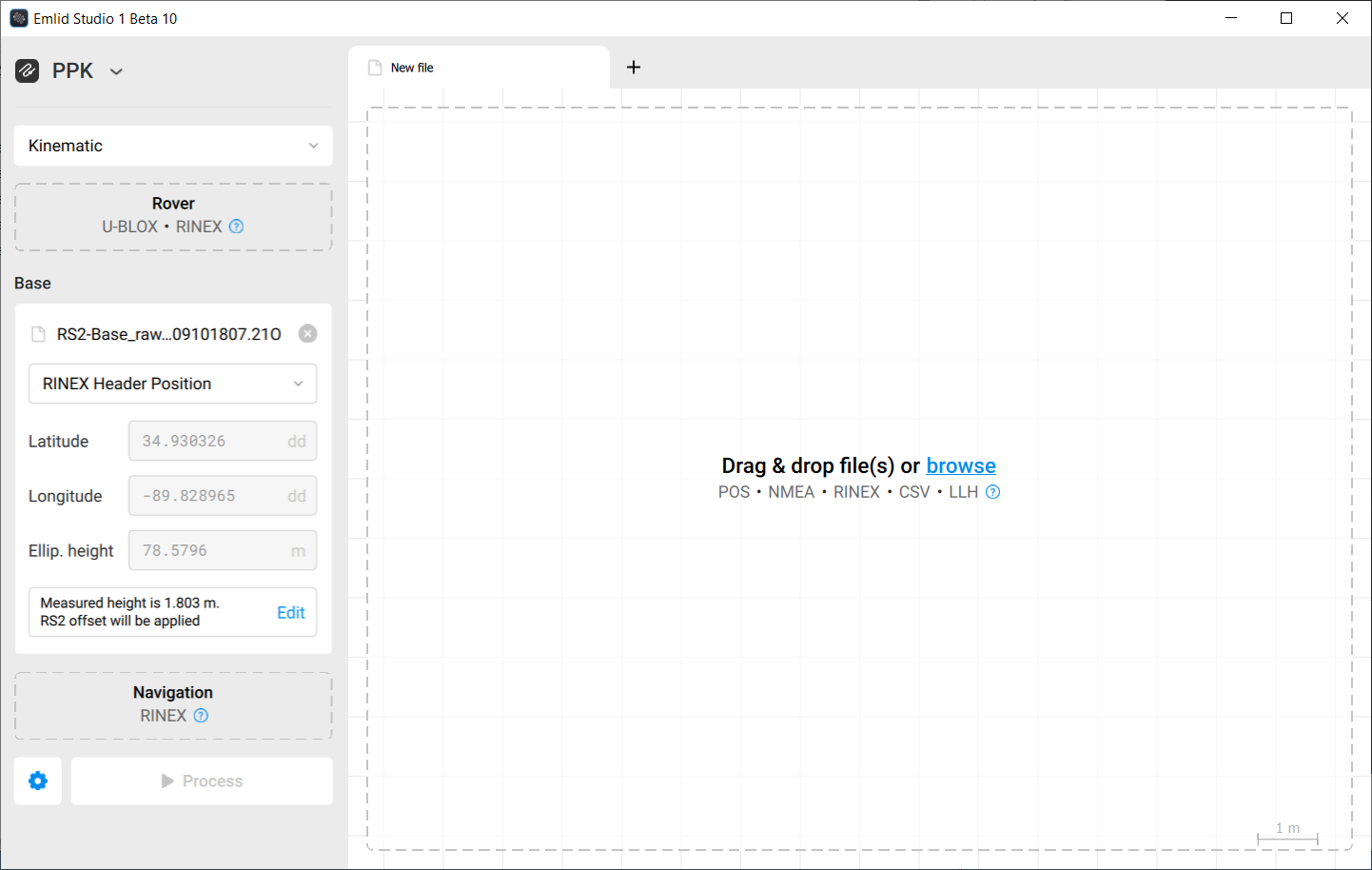
It is in the header of the Rinex obs file. These coordinates are usually only approximate, so never trust that they are correct from the beginning.
Christian, I now realize that when you change from Rinex Header to DMS or DD it simply populates the Lat/Lon fields with the last manually entered data. I mistakenly thought it was automatically populating the fields but when I added the base file from another survey which had not been processed, the same Lat/Lon/Height remained. It would be VERY nice however, if Studio would pull the PPK data from the .POS file that is generated when the BASE was processed using a CORS log file 
Hi @kseniia.suzdaltseva - I am having the same issue that @dpitman is. I would love to use Emlid for end to end processing here… but right now I need to generate the Timestamp_events.pos file manually (from the pos file, and my mrk file from the Autel Evo II RTK drone).
If Emlid could add this as an option it would be amazing. Happy to share data samples if it would help.
Hello Kseniia,
Can you provide me a sample .obs file that ES is looking for so that I can examine how it is formatted?
thank you,
Dave
Hi Jake,
Thanks, I’ve noted it! It’d be indeed great if you shared some data with us. You can send it to me via PM or support@emlid.com.
Hi Dave,
Please check your PM. I’ve shared the data there.
1 Like
Hi Tim,
It would be VERY nice however, if Studio would pull the PPK data from the .POS file that is generated when the BASE was processed using a CORS log file
Sometimes it appears to me that you guys can read our minds (or vice versa? ![]() ) We’re planning to add an option to upload a base position from a .pos file. It should simplify the workflow with CORS you described.
) We’re planning to add an option to upload a base position from a .pos file. It should simplify the workflow with CORS you described.
4 Likes
Hello, I have carried out the measurement of some Stop & Go terrain points, using the EMLID RS2, both in the base and in the rover. The transmission of the corrections were by LORA. Some points had fixed correction and others float. In the office make the adjustment with Emlid Studio and the option Stop & Go with RV3. Hoping to be able to adjust the float points, but by surprise that never happened and on the contrary the corrected * .csv file shows me that the points that had been fixed from the field measurement, are now in float. Why does that happen?

Hi @benefactum.xyz,
Can you please share the data with us here or via support@emlid.com? It will be easier to see the reason if we try to process the logs ourselves.