



I have just been using Reach-view for most of the configuration, but now I am ready to start using my GPS coordinates. I had another code(attached) from an Arduino sample using the tinyGPS library that I am retrieve and parse the NMEA strings. I figured it would be just as easy as hooking the TX(white?) pin from the Emlid to the rx pin i had set on the Arduino using software serial.
Reach & Arduino are being powered by USB from my computer.
Reach position output settings
UART
57600
NMEA
Reach Firmware: 1.2
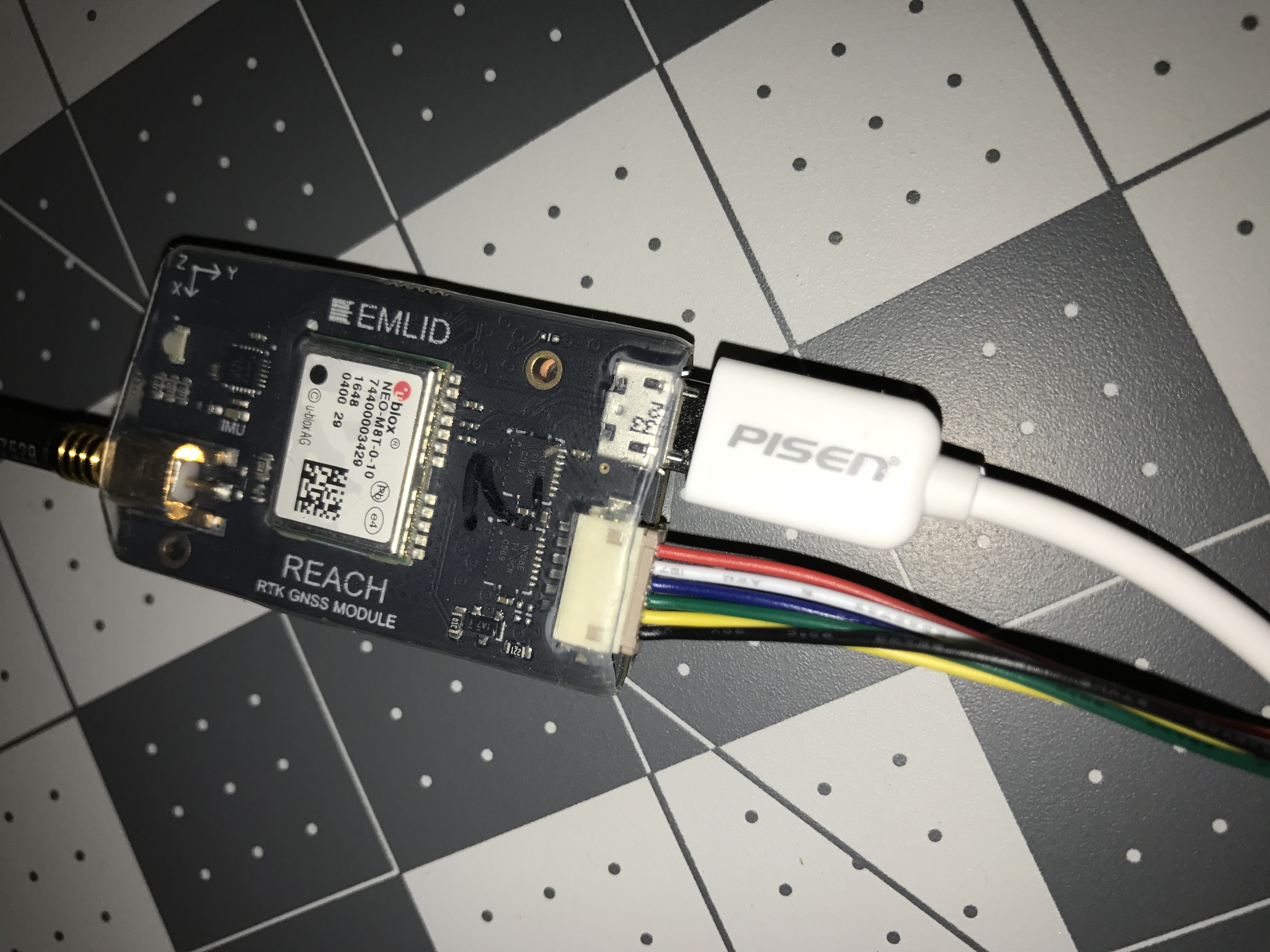
I have the TX pin from reach(white?) connect to pin 4 on my arduino.
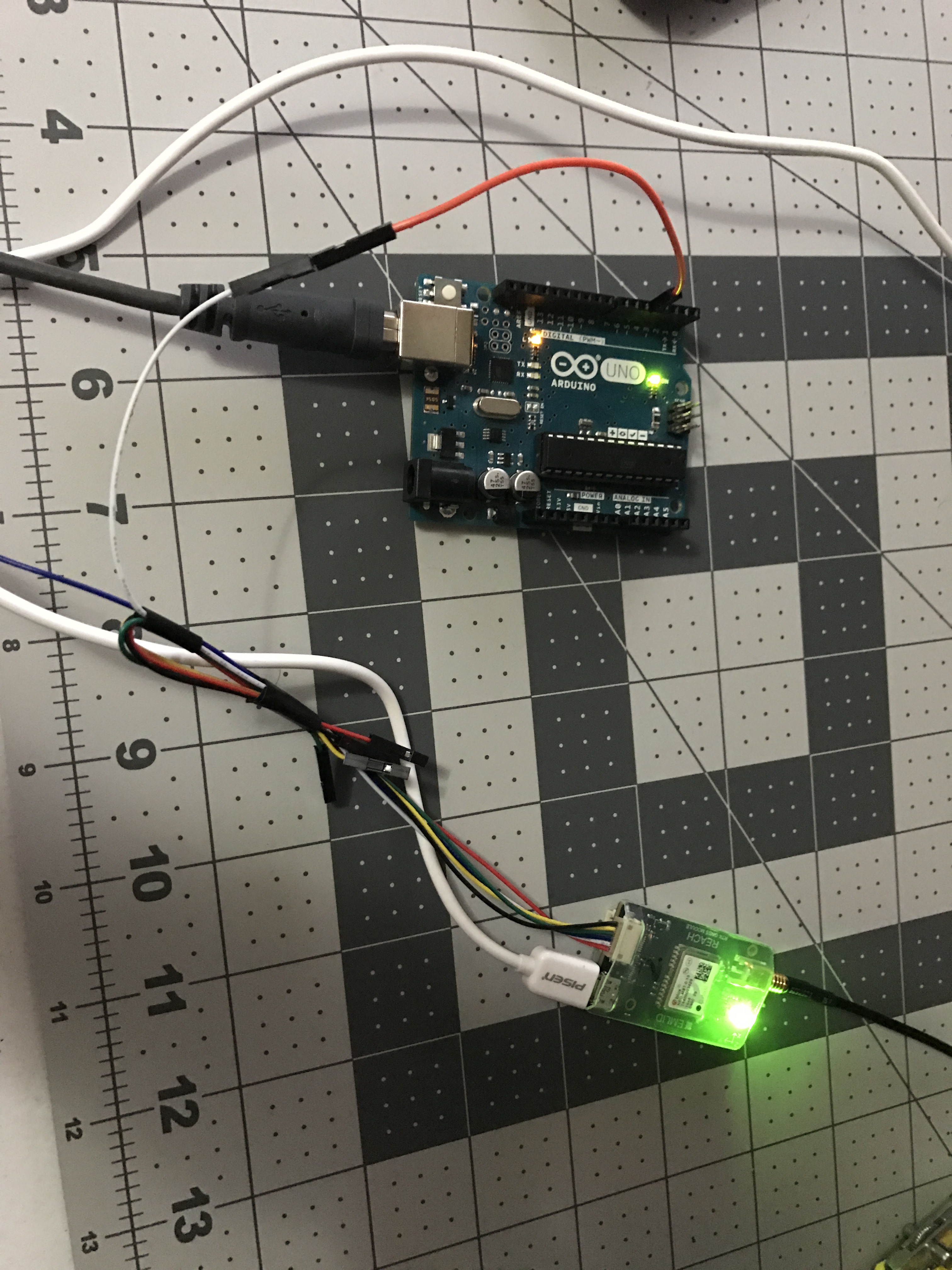
Could there be something with the logic voltage? Doesn’t Arduino run at 5v logic and reach is at 3.3v? I don’t know if that make a difference or not.
CODE:
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
/*
This sample code demonstrates the normal use of a TinyGPS++ (TinyGPSPlus) object.
It requires the use of SoftwareSerial, and assumes that you have a
4800-baud serial GPS device hooked up on pins 4(rx) and 3(tx).
LC20031 pinout(Top View *pins down* L to R 5 to 1
GND-5
GND-4
TX-3
RX-2
3.3V-1
Emlid Reach
Power Reach Via the USB cable
White-GPS RX
Blue GPS TX
*/
// The TinyGPS++ object
TinyGPSPlus gps;
int i=0;
// The serial connection to the GPS device
SoftwareSerial ss(3, 4);// GPSTX to 4, GPSRX to 3 // this part go switched around and may be the issue k
void setup()
{
Serial.begin(9600);
ss.begin(57600);//GPS Baud Rate
Serial.println(F("GPS SatsLatLong"));
Serial.println(F("Outputs Latitude and longitude"));
Serial.println(F("Jake Falck"));
Serial.println();
}
void loop()
{
while (Serial.available() < 1) {} // Wait until a character is received
char val = Serial.read();
Serial.flush();
if (val == 'g'){
Serial.println(F("Sats Latitude Longitude"));
Serial.println(F(" (deg) (deg) "));
Serial.println(F("-------------------------"));
printInt(gps.satellites.value(), gps.satellites.isValid(), 5);
printFloat(gps.location.lat(), gps.location.isValid(), 11, 6);
printFloat(gps.location.lng(), gps.location.isValid(), 12, 6);
Serial.println();
Serial.println();
i++;
}
if (millis() > 5000 && gps.charsProcessed() < 10)
Serial.println(F("Error: GPS data received(check wiring)"));
}
// This custom version of delay() ensures that the gps object
// is being "fed".
static void smartDelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
gps.encode(ss.read());
} while (millis() - start < ms);
}
static void printFloat(float val, bool valid, int len, int prec)
{
if (!valid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i<len; ++i)
Serial.print(' ');
}
smartDelay(0);
}
static void printInt(unsigned long val, bool valid, int len)
{
char sz[32] = "*****************";
if (valid)
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i=strlen(sz); i<len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
smartDelay(0);
}
static void printDateTime(TinyGPSDate &d, TinyGPSTime &t)
{
if (!d.isValid())
{
Serial.print(F("********** "));
}
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d ", d.month(), d.day(), d.year());
Serial.print(sz);
}
if (!t.isValid())
{
Serial.print(F("******** "));
}
else
{
char sz[32];
sprintf(sz, "%02d:%02d:%02d ", t.hour(), t.minute(), t.second());
Serial.print(sz);
}
printInt(d.age(), d.isValid(), 5);
smartDelay(0);
}
static void printStr(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i<len; ++i)
Serial.print(i<slen ? str[i] : ' ');
smartDelay(0);
}