



How would you precision in such a setup, where there is no central control?
1 Like
A large VRS or RTN requires a server with high bandwidth depending on how many users there are, and the VRS software. I doubt without a fee it would be doable. If you have a fee, you must also have support personnel to assist with problems. THAT IS A FULL TIME JOB! Have you noticed how many questions there have been since Emlid introduced their caster.
1 Like
Hey Seth,
Thanks for your request! We’ll note it. However, currently, we don’t have such plans.
Hi everybody, greetings from Chile.
I have a question about the caster.
Already bought two emlid RS2 receivers and I’m planning on using one as a base and the other as rover. Already connected the two receivers to the emlid ntrip caster, as base and rover, and the two appears “Online”. Now the question is about my baseline. On my “base” I have a baseline over 7000 km and on my “rover” I have a baseline about 10m (the distance between my base and rover, so that’s ok).
My doubt now is for the first baseline, between my base and the caster itself. It’s fine to have such a giant baseline (over 7000 km)? or should I need to buy an account on a ntrip caster near my area or a ntrip service specific for my country? … I mean, I saw several videos and your tutorials and specifications but in all they say that the baseline should be <100km for RS2 (Placing the base)
Need more info about this please, the corrections that I’m sending to my rover are really correct with a baseline over 7000km?
Thanks in advance for the reply.
Regards.
Luis.
2 Likes
7000 km is way too much, for multi frequency RTK 60 km is the limit.
2 Likes
Hi Luis,
From what you described your rover seems to be connected to your base properly and you are getting a correct baseline.
There is no such things as a baseline between your base and caster, caster does not produce any corrections, it just relays what your base is sending to your rover.
What is likely happening is that you have configured Correction Input on your base and you are receiving some correction there and this is why you see this huge baseline. It does not actually affect the operation of your base, but simply disabling Correction Input on your base should make everything look right.
If this doesn’t help, please post screenshots of how you Correction Input and Base Mode are configured on your base.
7 Likes
Hey Igor, thank you very much for the reply. I realized that you are right, by mistake I had the input correction in the base activated. When disabling it, the baseline of more than 7000km disappeared.
Have a nice day!
2 Likes
I see a case for this but it would have to be a select group of Mount Point Casters, this would be to for QA & QC and maintenance/trouble shooting of the positioning data being cast and GNSS system setup by the group of users(volunteers).
Was thinking in my mind you must have meant 7,000m…I see a possibility of receiving input correction from a national NTrip service at that distance to fix a local base point.
Cheers, enjoy your units.
1 Like
Hi support,
I was wondering it could be a good idea to check if the base in functioning well by typing as a URL in a web browser the IP
#####CASTER ADDRESS#####
Eg :
caster.emlid.com
159.89.145.103
So this is what I do:
in Firefox I type
http://159.89.145.103:2101/
Then I can see many MP.
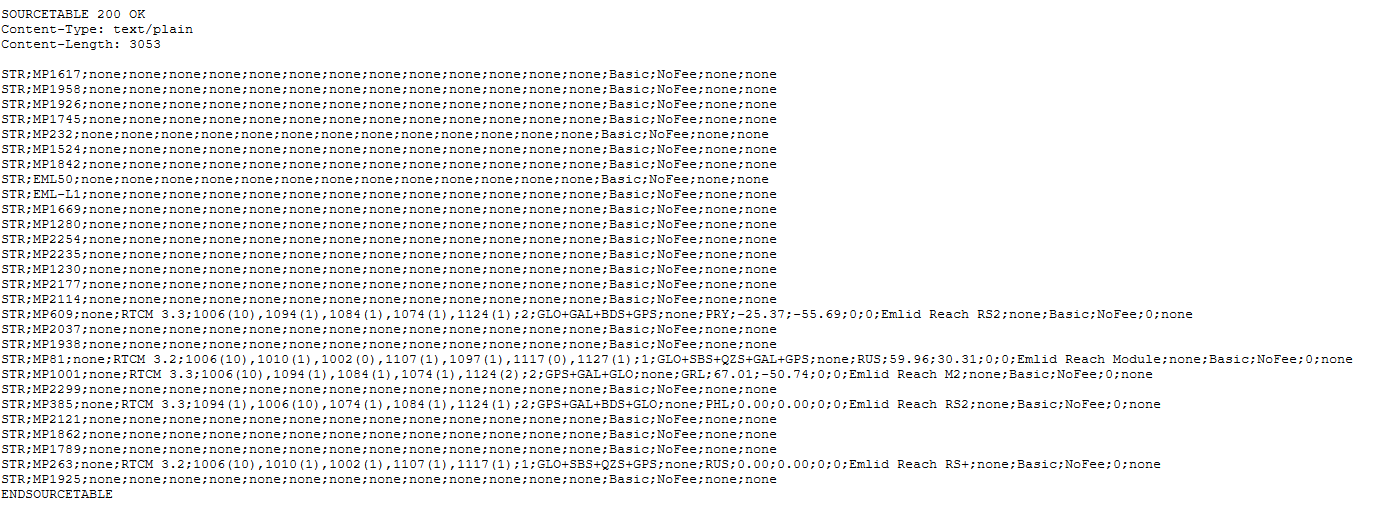
However mine is not active…
whereas on my personnal “sign in” Emlid portal I can see my base ONLINE ?

any idea why ?
thanks
Hi @a.billault,
The base showing up as online and being included in the stream table means that there’s an active connection between your base and the Caster.
If your concern is the “nones” showing up in the table, please pay them no mind. The receiver does not send all the required metadata to the Caster yet and a fully working correction stream will look like that too. It’s a known issue and the next major Reach firmware update will start sending all the required data to fill up the stream table.
3 Likes
Is there a bandwidth estimate for the caster? For example, how much bandwidth would a single rover use, per hour? Thanks
At max tilt, around 18-19 kB/s
I have never verified it but I was told running Ohio CORS 24/7 would use about a Gig in a month. Next time I connect with Lefebure NTRIP I will check what the data is in an hour.
Hi @AeriaPhoto,
Could you please specify the data you’re interested in? Do I get it correctly that you’re interested in the amount of mobile data you’re going to use while sending the corrections via the Internet?
I think he is referring to the rover with the client as it would most likely be using cell data where a server could be on your home network.
This is correct. Client side.
Hi @AeriaPhoto,
This will depend on the amount of data you’ll receive and their update rate. Also, the RTCM3 messages for single-band and multi-band receivers are different in terms of weight. However, we have some reference values for each message. Could you elaborate what unit you’re planning to work with so that I can give the relevant info only?
This topic was automatically closed 182 days after the last reply. New replies are no longer allowed.