Only difference is I’m using CUAV V5+ flight controller and Neo V2 pro ( UAV CAN GPS).
your sending correction over lora radio .
Only difference is I’m using CUAV V5+ flight controller and Neo V2 pro ( UAV CAN GPS).
your sending correction over lora radio .
I believe you need to configure correction output, but I’m not sure because I not familiar with reachview3, I still use Rview2(ios) or use browser to config emlid…
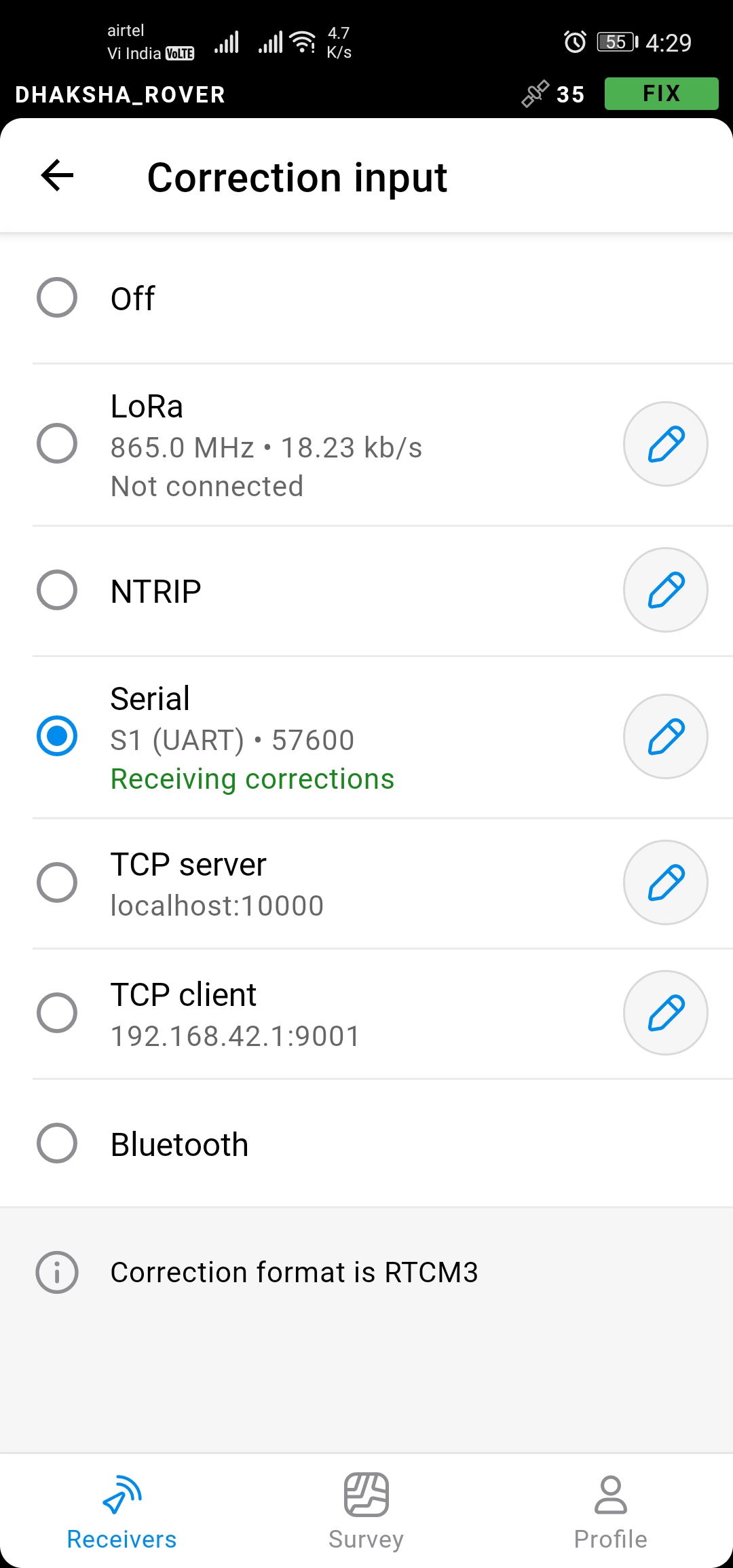
the only difference if use emlid lora or uav telem are at correction input option.
and why I use emlid lora, because my telemetry not fast enough and not enough bandwidth to inject RTK data when I use that feature, and that affects my UAV data becomes laggy.
Hi Kalai,
I can understand your feelings: we all want our hardware setups to work straight away with minimal adjustments. However, as we’re talking about the satellite-sensitive receivers, you have to analyze your own conditions precisely to make the receiver perform in the best way possible. This is correct for the different hardware setups as well.
What we list in the docs are the tested configurations that work for us 100%. The same goes both for the ArduPilot integration and for the RTK configurations. However, if you do any ArduPilot’s upgrades, they may change internal ArduPilot settings, therefore leading to the change on your rover’s configurations. That’s how it works.
We have a lot of users who are working correctly with the Reach M2 integrated to the autopilot. So the connection is possible with the settings we suggest. We’re working correctly with them, too, and running missions on our drones. Our main goal for us here is to find what blocks you from having a good experience with Reach.
For that, we need to treat one issue at a time. From what I see now, you are having issues with receiving corrections on your rover from your autopilot and you don’t receive the position of your Reach on your autopilot. This looks like the port issue. Have you tried going with another port and testing Reach with it? Lowering the baud rate to 38400 can also reduce the load on the port.
Also, if you’re configuring Reach as the primary GPS with the ERB position output, please check that your GPS_TYPE = 13 (ERB).
Please share your testing results with me.
I was tested with lower baudrate only until @fajarsptian suggest that 57600 baudrate works well and I had tried many autopilots including black cube,and CUAV V5+ autopilots.im sure my autopilot ports are working well.
Yes from the day1 I purchased emlid Reach UAV mapping kit I never successed RTK integration … definitely step by step I’m following emlid documents that’s why I’m getting lot of confusion over the document because no suggested setting were worked for me.you can just look my another my own thread I was created and very long discussion.
I was tried all the 3 possible GPS_TYPE = 13( ERB) 5(NMEA) and 1 ( AUTO) …nothing worked
Have you tested all at latest firmware like emlid Reach M2 and RS2 and also ardupilot firmware too … You getting success RTK integration .
Do you think document page is up to dates and cover all the portion of latest and case studies like soo.
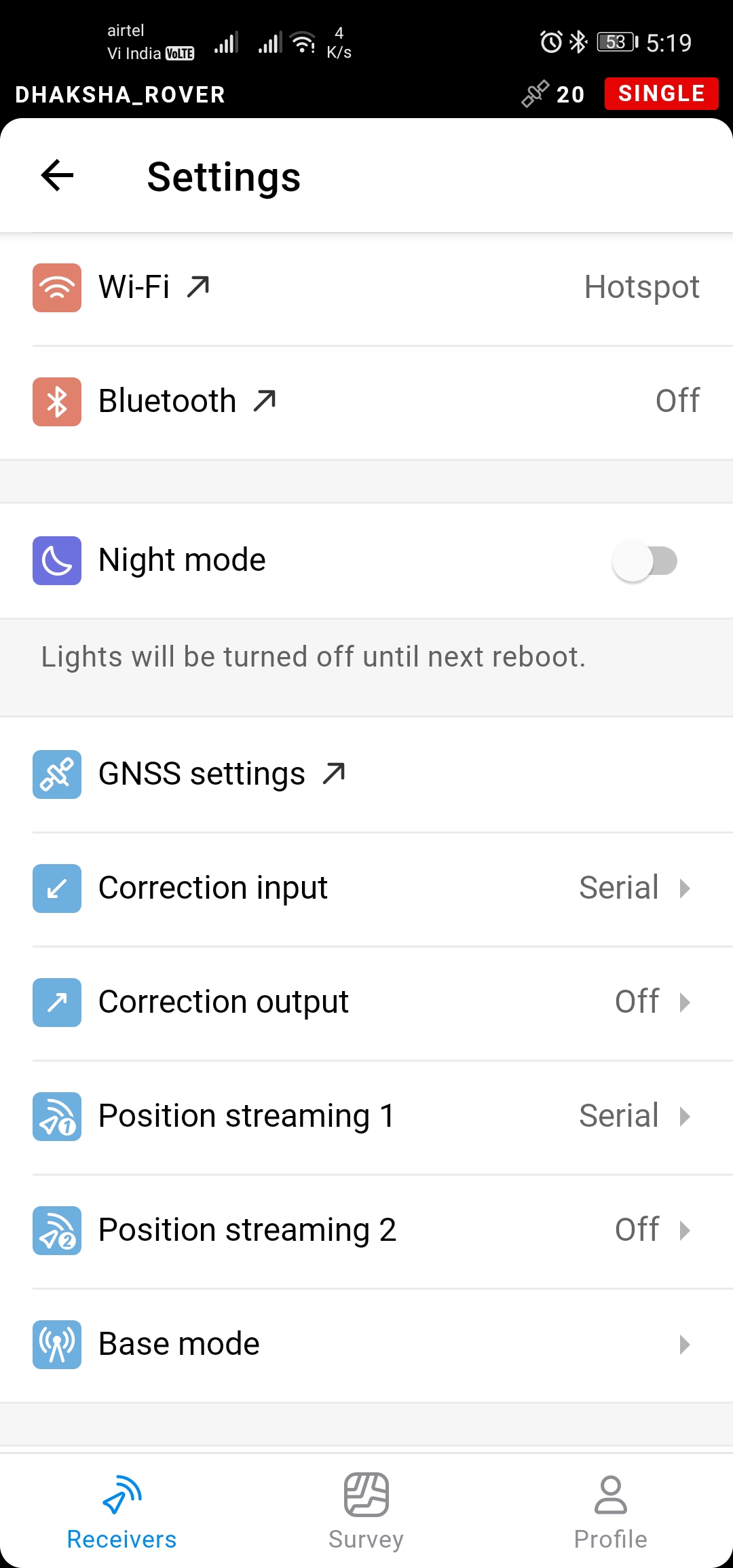
Above screen shot is Reach M2 configuration.im using UAV telemetry serial radio for both accept and send RTK correction.
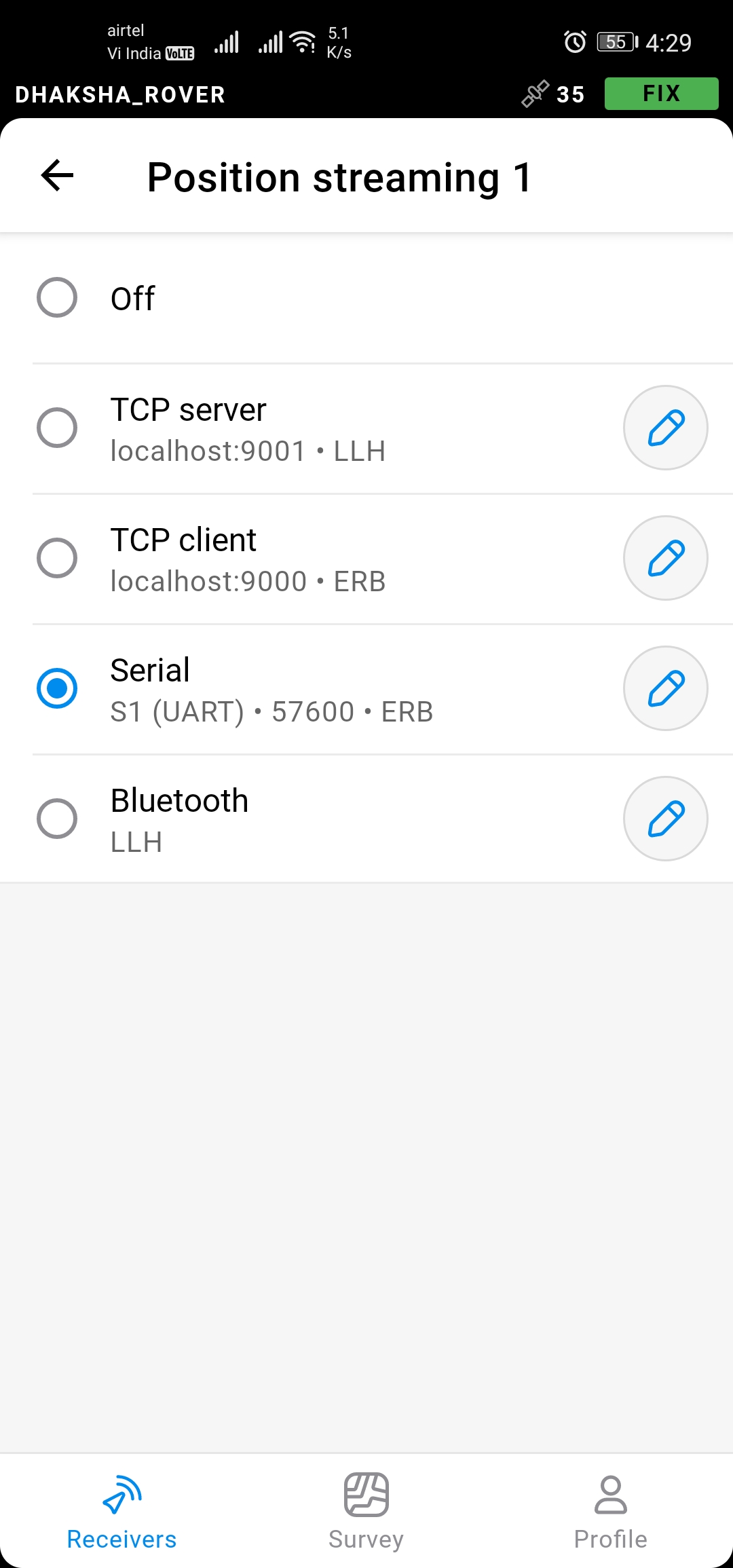
In that case I have to configure it on the correction input as serial that’s ok.but I’m little confusing on whather I have to configure correction output tap or position streaming 1 tap ?..
@fajarsptian thanks for the guide and successfully configured Reach M2 with ardupilot with telemetry link itself not with lora.
Configured protocol as ERB at 57600 at telemetry 2 Port of the CUAV V5+ Flight controller.
I was gone through the forum and most of them suggested NMEA protocol instead of ERB.
@polina.buriak what your suggesting ?
@fajarsptian as you said UAV telemetry radio doesn’t have enough bandwidth to send RTCM3 correctios over it. this you found in ground test itself or while flying and sending long range did you noticed this.
Hi Kalai,
Sure, we’re testing all of our equipment on the latest versions. With ArduPilot it can be a bit more difficult, but we always test your configurations on the version you report.
It’s great to know your devices are working correctly now! There indeed can be some difficulties with the bandwidth of the telemetry radios. I suppose we can add this as a note to the docs to avoid confusion further on.
Regarding the choice between NMEA and ERB, it’s all yours. ERB is now not being updated frequently. However, both of them should be working fine if configured correctly. So I suggest checking both and deciding for yourself which one is more preferable.
hi @Kalai_Selvan
glad you found the right setting
I already tested at ground and while flying, radio telemetry can’t work smoothly with RTK data pass through it.
from that I decide to use emlid Lora, almost 2 months the drone working good 
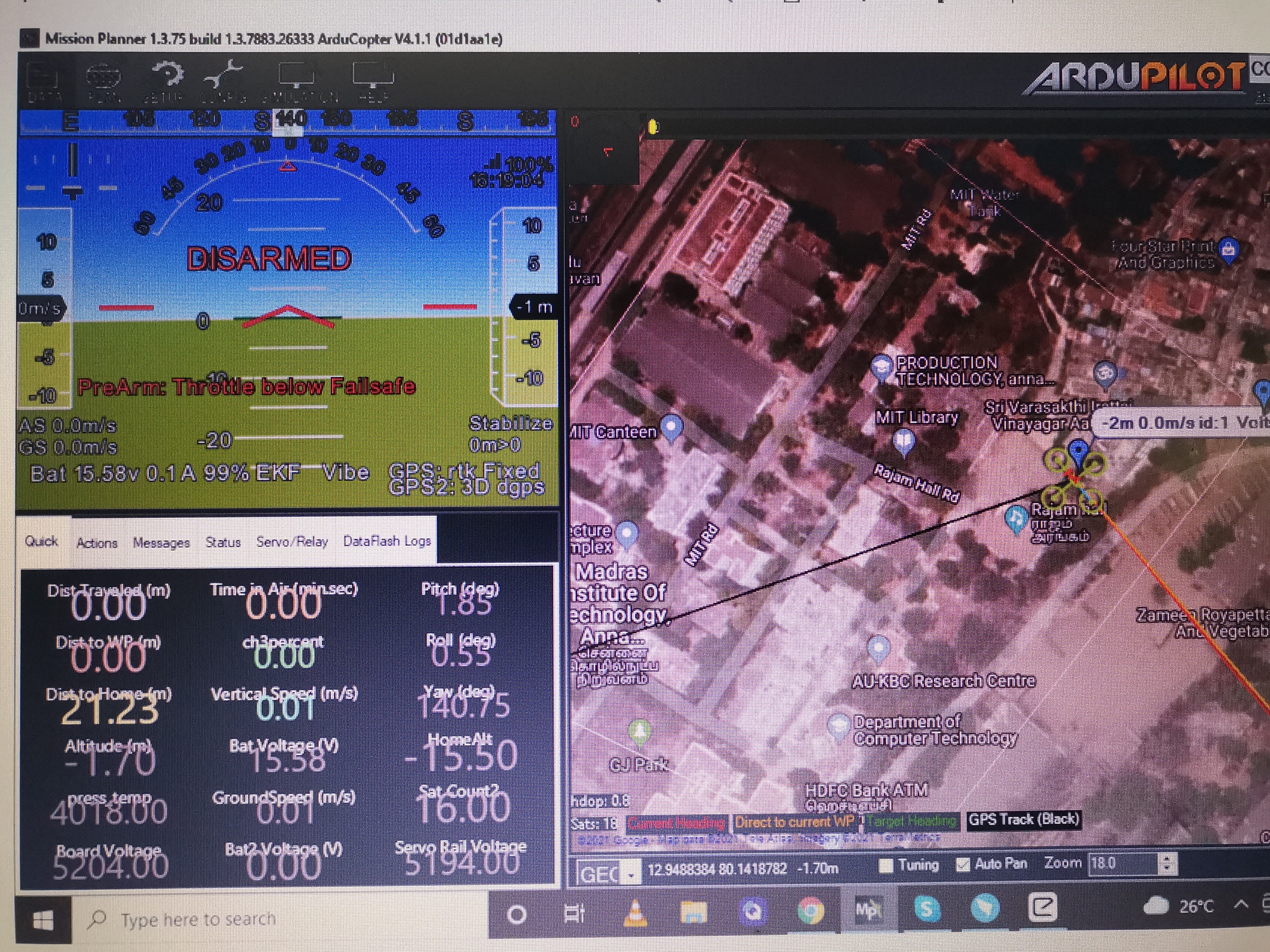
Today I conduct flying test after so many long days after configured successfully Reach M2 as primary gps to the Pixhawk CUAV V5+ FC.
I changed reach M2 position streaming as NMEA at 57600 baudrate but it’s gives me error as Bad GPS health and prearm arror for Gps.
But after changed reach M2 Protocol to ERB at 57600 error went out immediately and no more error message pop up from mission planner.
As you said it’s still confusing me and wonder about this because ERB not being in the update queue frequently and most user recommended to use NMEA protocol only.
Flying with ERB protocol in loiter mode and it’s performance was better and beautiful.looking for further waypoint mode check and flying performance with telemetry radio itself.
congratulations @Kalai_Selvan
happy flying brother ![]()
![]()
![]()
@polina.buriak need your suggestion and clarity on this .
If ERB is working in your configuration, then it’s great to go with it. ERB is emlid’s proprietary binary format for position information. And it requires the receiver to also specifically support the protocol. NMEA is a standard ASCII text protocol that lots of manufacturers implement for communication. But this requires conversion of the message to ascii text, transmission of the ascii text, and parsing of the ascii text on the receiver. All of this takes more processing overhead and likely more transmission bandwidth. Since Ardupilot supports ERB it’s likely working better because it is less demanding on your transmission link, but it is still sending all the information that you need. You might be able to get NMEA to perform better than it has been by customizing the “sentences” sent to the drone to only those you need, but it’s not going to give you any performance advantage over ERB.
I don’t use drones, but I use 2 RS2s for RTK surveying and I use ERB protocol over Bluetooth to field genius for android. NMEA works too, but I prefer ERB as it also transmits the location of the base so field genius can natively know the baseline. NMEA doesn’t do this (maybe it will be added in the future).
When emlid says they’re not updating the ERB protocol anymore, it just means they aren’t adding any features and creating newer versions of the protocol. If they update it, they have to coordinate with all developers who use ERB to also update their versions as well. But ERB is already transmitting position, fix status, base position, everything you need for your application. The only future updates I could see it needing are if they begin to output additional information from their products (like IMU).
Very interesting and detailed information you shared here…very much useful to me and very thankful to you.
Hey there,
Applauds to @Africawaterdoc for the great explanation!  I got nothing to add here.
I got nothing to add here.
It’s indeed a possible scenario to get NMEA working with the specific settings. You just have to search for them longer and test them harder. ERB can be a much simpler tool in that respect.
@Kalai_Selvan thanks for sharing your experience and sorry for being absent from the thread! Great you now have a configuration that works for you fully. We’re here to help further on if needed 
@polina.buriak Thank you for considering your future help too… please help me to calculate the offset of the M2 antenna with camera which is marked in pink circle to the antenna.
Hi Kalai,
This is a rather impossible procedure to conduct remotely. I can only give you some basic ideas here. One thing to understand is that this is a three-dimensional check. So it’s not enough to get the one-axis distance, strictly speaking. This is something usually provided by the drone manufacturer.
Sorry to confuse here I mean that where I have to enter the M2 antenna offset to get the exact value.
Hi Kalai,
Depends on the workflow you’re employing. I know that with Mission Planner, you can set them up as well when you’re preparing for the automatic missions. You can read more about it in their documentation.
For example RS2 there will be only Z offset that we can measure and feed it in the emlid studio as base antenna offset.
But here I’m asking about Rover M2 offset,here there will be offset in both Z and and X direction. These datas where i should I enter to get correct offset between camera and M2 rover antenna.