I had a try with Mission planner once and my parameters were corrupted. I had to redo a fresh installation (copy a fresh .img with Etcher on the Edge). So, now, I stay away from Mission Planner when using Edge. I only use mission planner to analyse logs (downloaded with QGroundControl).
I was able to connect the Mission planner to Emlid but after connection was set-up, different parameters were missing such as- Sensor Calibration, Motor test, etc. When Emlid is connected to QGC all parameters were present and I tested them with Quadcopter.
I want to ask that when Mission Planner is connected to Emlid does all the parameters were present and are all these parameters tested with any system?
@mlebret
Have you managed to program survey mission with auto take off and auto land on Edge QGC?
Because on MP is very simple to organize but on edge QGC i cant seem to find auto take off and land.
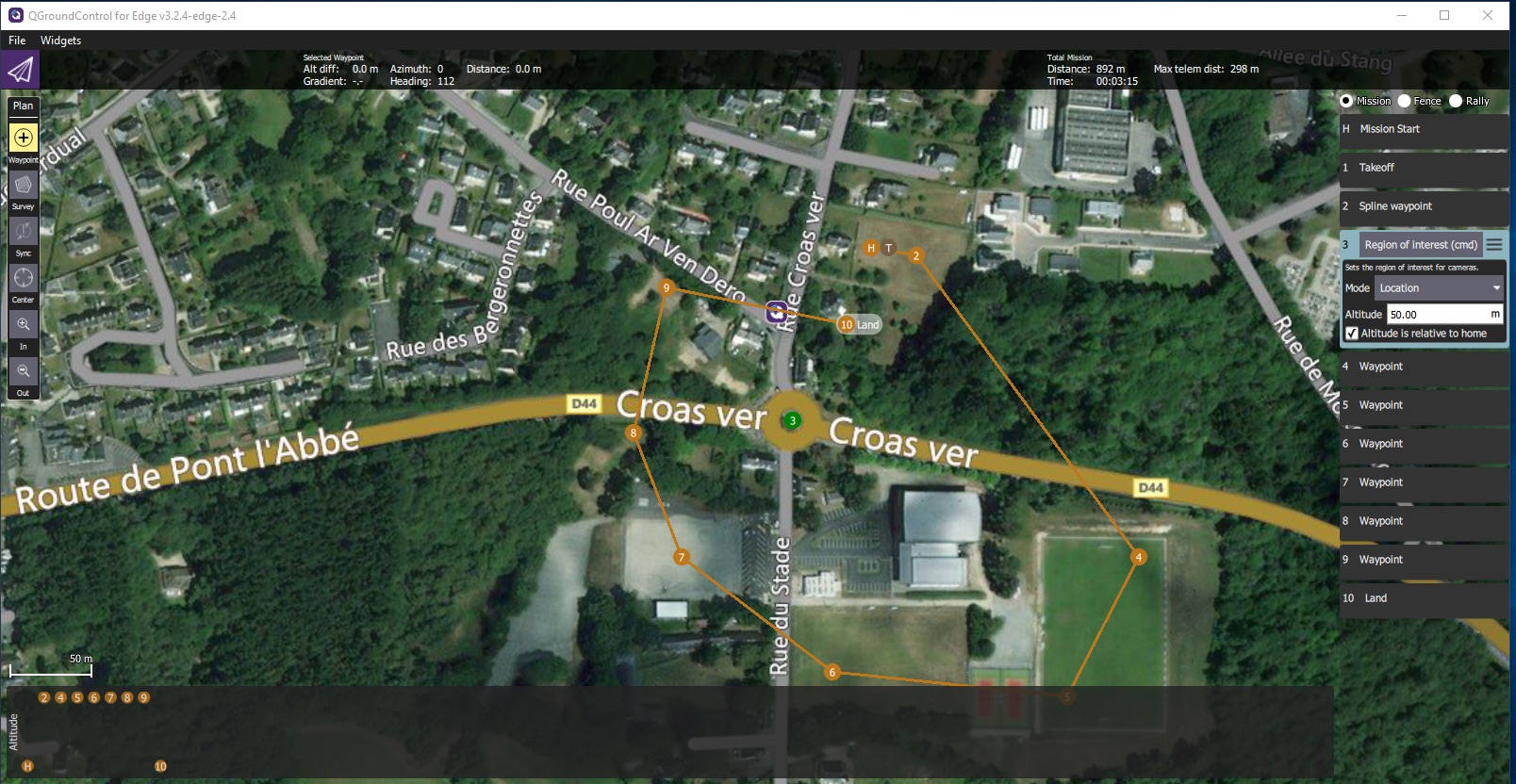
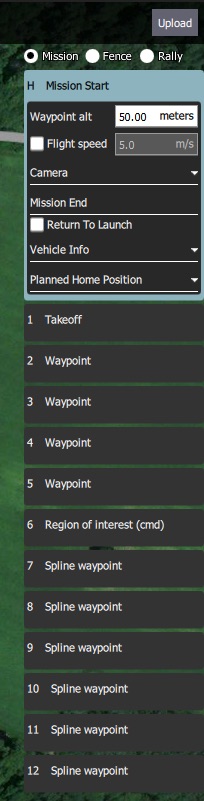
Left side, with the Plan options (Waypoint, Survey,…) and right side with the list of waypoints and what to do at each one.
To create waypoints, you select waypoint button (highlight) in the left window. Next, on the map, you place your points, first to be the take-off point, latest to be the landing point. if you need to have a region of interest (to point the camera to), you can decide it will be the point 2, (my exemple is the point 3. You place it on the map and later you can edit it with the ROI order.
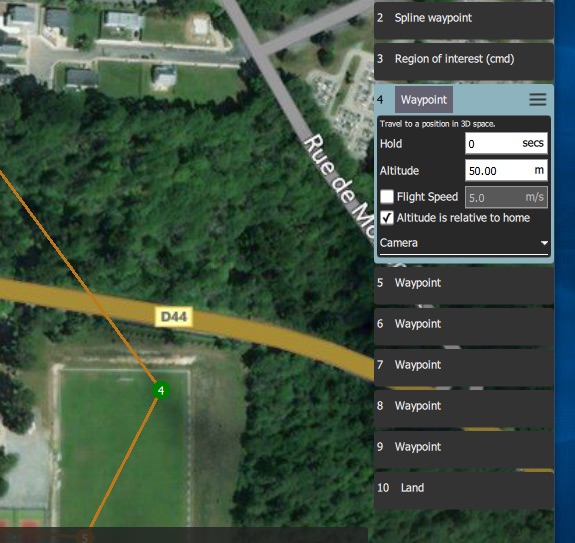
To edit a point, you click longer on it and it go green. Next in the right menu, at the right of the label waypoint,
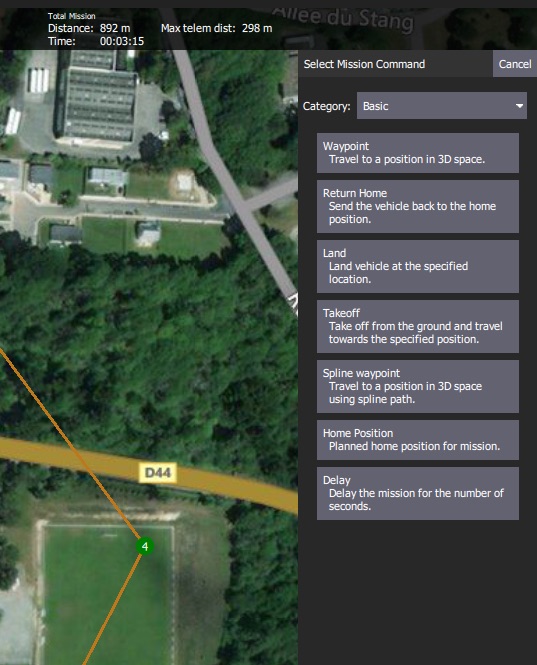
you choose change command and explore the options.
Thank you for reply.
Documentation is crap but I am trying to create survey with auto take off and auto land at end. I understand that I must insert by hand waypoint for take off and land but what I noticed is that I go to plan and hit survey nd instally on the right is generates new mission and 1? Asking me altitude and if I wish rtl. I hit survey and create area by dragging and I can see on right 1 as new mission and 2 as survey. I add on top of survey take off and below a land. But then I have: 1. New mission, 2.takeoff, 3.survey and 4. Land
I am simply asking to see if this is how it should be so I can test in the morning a small auto survey mission.
I would like to be able to arm and flip switch to auto and have uav take off, survey, return and land on its own
Thank you for sharing with me your experience, soon I am waiting an edge of my own for extensive testing and part of it will be MP. So to see if I got it correct. Misssion with RTL-> take off action-> we, Roi or other-> land. You arm motors, switch to auto and all of the above happens? Right? Have you tested to have TAkeoff and land on the same spot as you arm the motors? Because I try to make on top of each other but it did not allow me
RTL instead of land? Or do you mean that after WP instead of land I add RTL and then land? QGC is way too complex for my taste. Or do I make takeoff, wp, and then simply rtl with zero altitude?
It’s so confusing. Says rtl on mission start but nothing on land command.
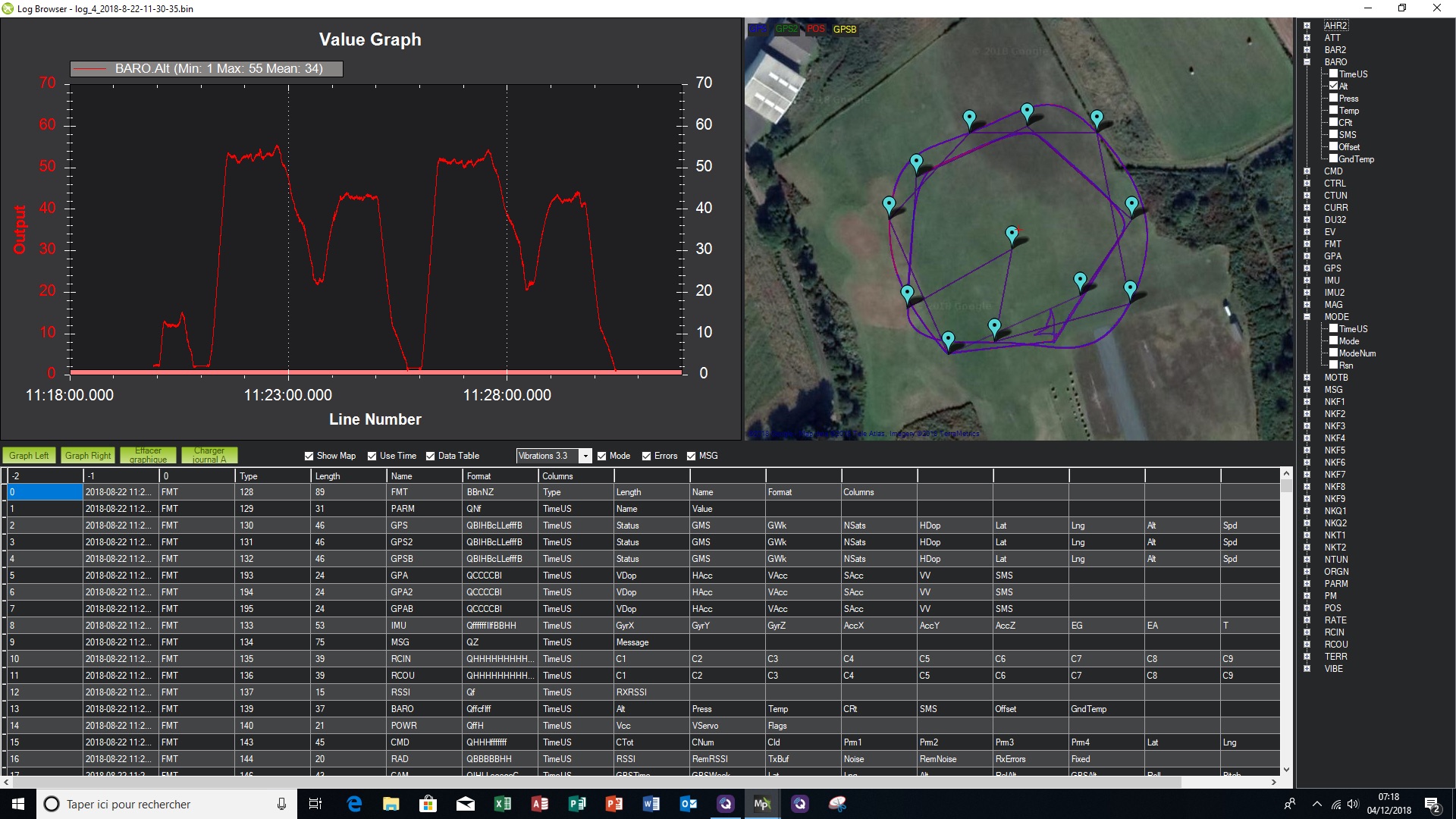
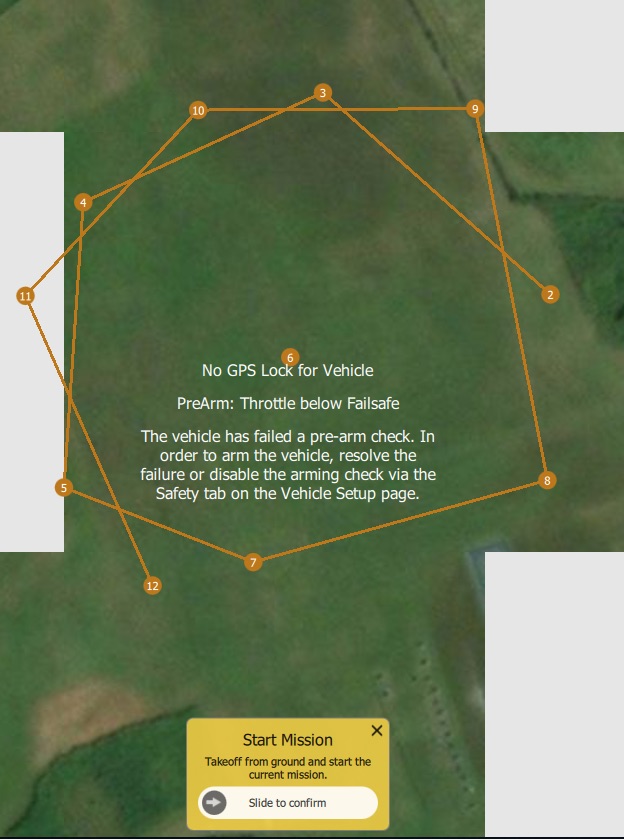
During this flight, planned mission is executed twice. There is a short stabilize part to check the bird, with Arm, Flight, Disarm.
Next I proceed to Auto Flight. For it, I didn’t arm the motors, I just slide the Start Mission “button” on the GCS Screen. You can have the same result when manually arming the motors and switch “Auto mode”. Spline waypoints part of the flight is with variable height (descend then climb) while looking the ROI.
In the Mission End line, Return to launch is checked (not on the picture).
No need to add a RTL order after waypoint 12 or to specify a landing height (ref your question)
I have a question: with QGroundControl, Flight plan is saved to the Edge (Upload button). When connecting for next flight, flight plan data is downloaded to the computer, but I see no option to save a flight plan to computer for archive or mission preparation. It is possible to do it with Mission Planner.
apologies for my late reply but from 9am until 2.30pm i was out flying and testing the build along with the owner.
a) on QGC, if you plan mission with RTL checked (i only did survey) it will fly the mission and return and land on its own. So i would gues officially you only need to add a takeoff WP only for takeoff (but still not sure), since the owner wants to only start mission from the air.
b) on QGC when you design a mission you have the option to save the mission to file and save it for later date, same with MP. I have never needed when a mission is “downloaded” from edge/pixhawk to save into a file but i promise i will check with a pixhawk available since i am starting today tuning on a hexa and i will be able to see and come back to you.
Since i have descided that i would like to have additional testing on edge, i am ordering one at the moment for inhouse testing and soon i will be able to do alot of "“problem” solving. I only hope that they will soon make full intergration with MP for everything as also go to 3.6+ since the new battery failsafe options are 10times better than 3.5.5.
The Sync tools are used to move missions between the ground station and vehicle, and to save/restore them from files. The tool displays an ! to indicate that there are mission changes that you have not sent to the vehicle.
Before you fly a mission you must upload it to the vehicle.
The Sync tools provides the following functionality:
Upload (Send to vehicle)
Download (Load from vehicle)
Save to File
Load from File
Remove All (removes all mission waypoints from Plan view and from vehicle)