



I would appreciate Emlid Help on this log.
This is an existing build that was flying with a DJI wookong and decided to upgrade with an Emlid Edge.
ESC’s radio and all other calibrations were done and decided to run Autotune.
It was taking took long and decided to land the copter and be done with the procedure and find other way to make initial tune, only during landing and with the throttle closed it decided to flip over.
Any help would be appreciated.log_12_2018-10-24-14-18-03.bin (8.6 MB)
Hi @tonyantzoulatos,
Could you share your drone hardware setup photos?
Please also describe precisely the moment it starts flipping over. What was the weather conditions? Which altitude did it happen?
Dear Tatiana this happened during touchdown. No issues with setup. No problem either to send you pictures but this is an Aeronavics frame that a customer had and since he wanted to have your controller we installed it.
We mostly build PX based machines so setup was not a problem. I am trying to review logs and find out why it happened (It touched down and we kept throttle fully closed) but then it spooled up the motors and flipped. It was a very calm day since this is what autotune preffers.
Do you still need the pictures? We made full repair and today tested again the the PITCH tune went fine, ROLL i had to stop because it felt strange on my hands and decided to copy settings and fix anything more manual. I simply ask to see if there is anything more you can tell me. Last but not least i have a serious problem with this edge and Greek FAA since they are requesting a serial number and i cant locate it on the board/Qground/MP or any other place. Can you help out?

@tatiana.andreeva Good morning.
I have send you pictures and details as also the autotune log, but finally i got to tune(without autotune) and once again on my landing i had the same problem. I am uploading once more todays log. Your help would be appreciated.log_17_2018-11-1-09-06-48.bin (2.1 MB)
Hi @tonyantzoulatos,
Thanks for sharing logs with us! I’ve examined it.
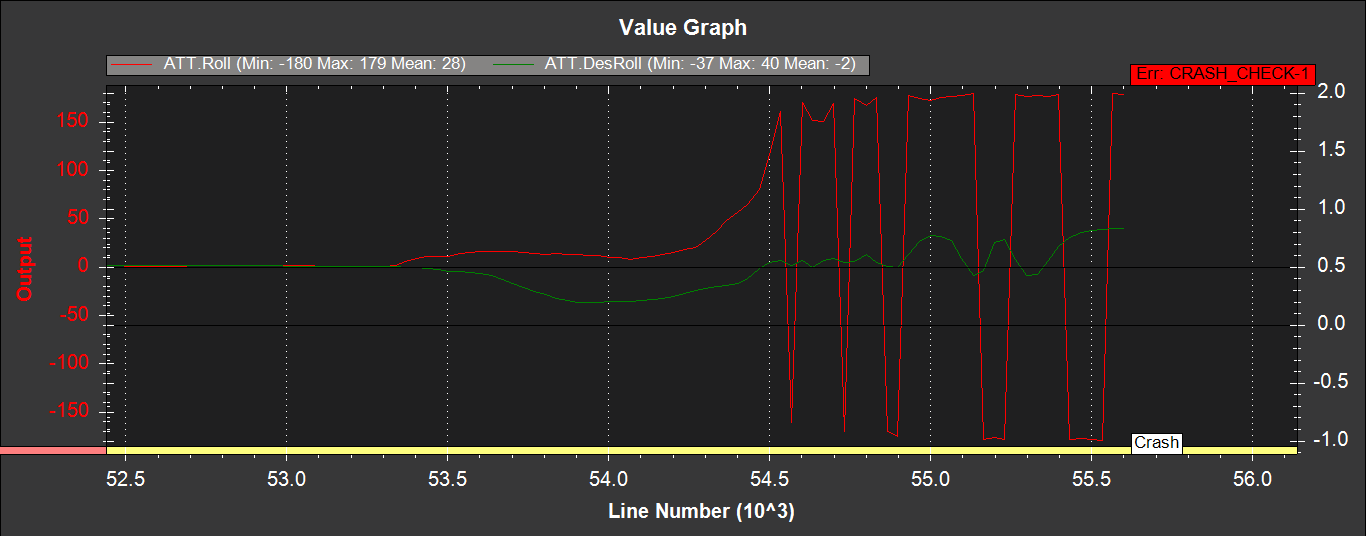
The green line is an expectable roll behavior. The red one is a real. As you can see, they differ a lot, and we need to understand why. Now it’s hard to say certainly what might cause the issue.
May I ask you to land the drone in stabilize and althold mode? Could you please record a video of these flights? If the issue persists, it helps to understand what can affect it.
Is it possible that this behavior occurs because of the ground effect?
Sure. You can find the serial number of Edge on its bottom side under the barcode.
Hello Tatiana and thenk you for your reply.
Which of the two logs you checked? 24th of October on November 1st?
On the 1st of November you will see that during the flight both P&R lines Rdes+R and Pdes+P are fine which means that PID is most likely spot on. On both flight GroundEffect was disabled and also PILOT_THR_BHV was set to zero (even though i am using a mid stick radio with return spring).
Problem seems to be that even though it touches down it keeps motors on and actually pretty high. I just return MOT_SPIN_MIN&MAX to the lowest possible proper working values to see if this helps.
I would appreciate your comments on review of PID and ATT_rates so that we can solve this and help offer more of these FC’s. PS…it is mandatory that Serial is also included in the FW/Software as you can see on the Pixhawk Cube2.1 board since review of the bottom side of the FC on an assembled Multi will not be easy by Greek FAA since they fiscally have to take out the board.
P.S.: you can see that through the flight on Nov1st when checking ATT on DesP/P vs DesR/R the P line are perfect on top of each other and the R lines the same and only on Land there is a problem. As you will also see that since YAW is not yet 100% tuned through the flight there is overshooting and correcting.
Hi @tonyantzoulatos,
I’ve checked both.
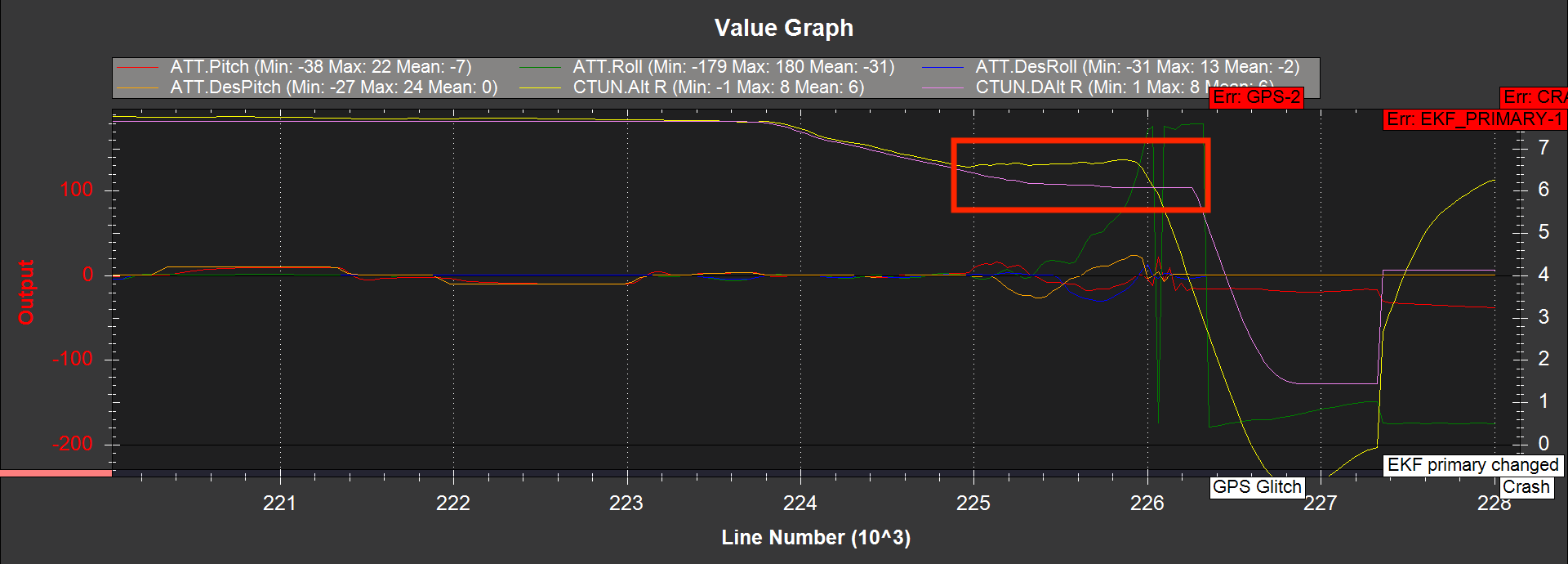
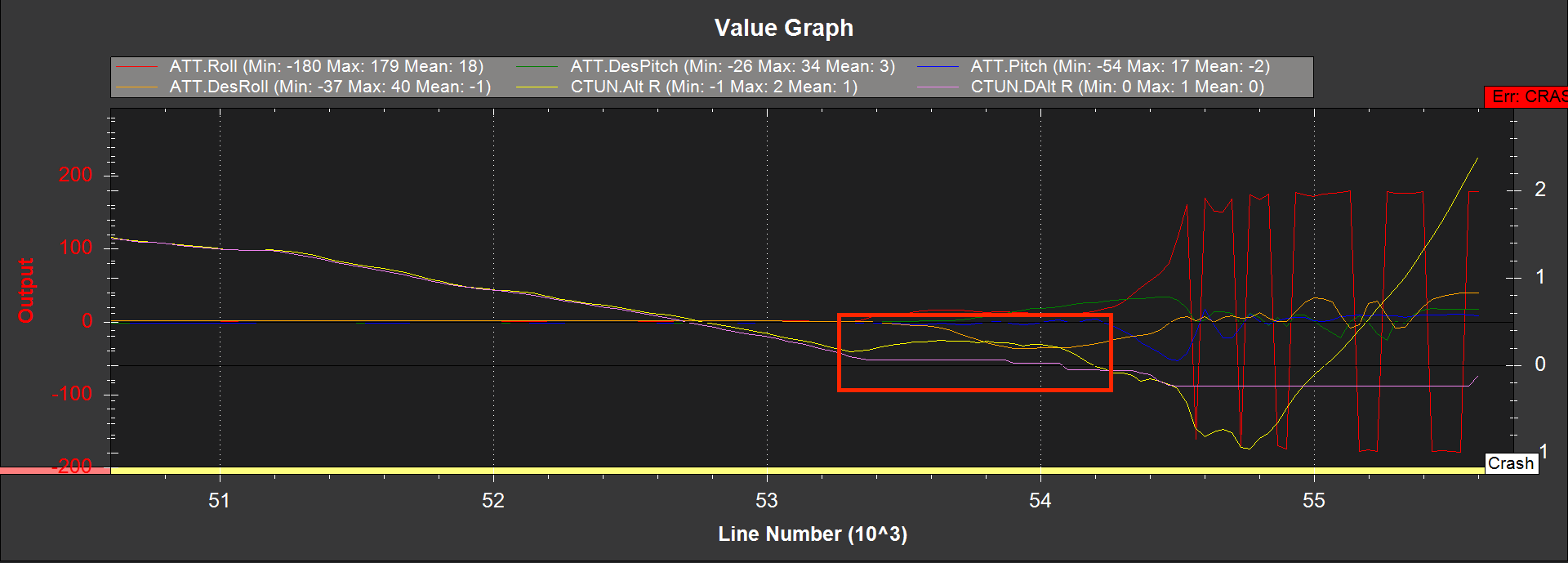
As you can see from these screenshots, there is a difference between CTUN.Alt R and CTUN.DAlt R parameters before landing. That’s why I think it might be a ground effect. So I’d recommend trying to compensate it.
Keep us updated regarding your tests.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.