



Hello,
My drone just continues to report these errors. When I first boot raspi, there is no error. However, after several rotations in my hand or a few seconds’ take-off and landing operation, these error occurs. And there is always no 3D fix even I am under open sky.

Hi Jason,
I would start from:
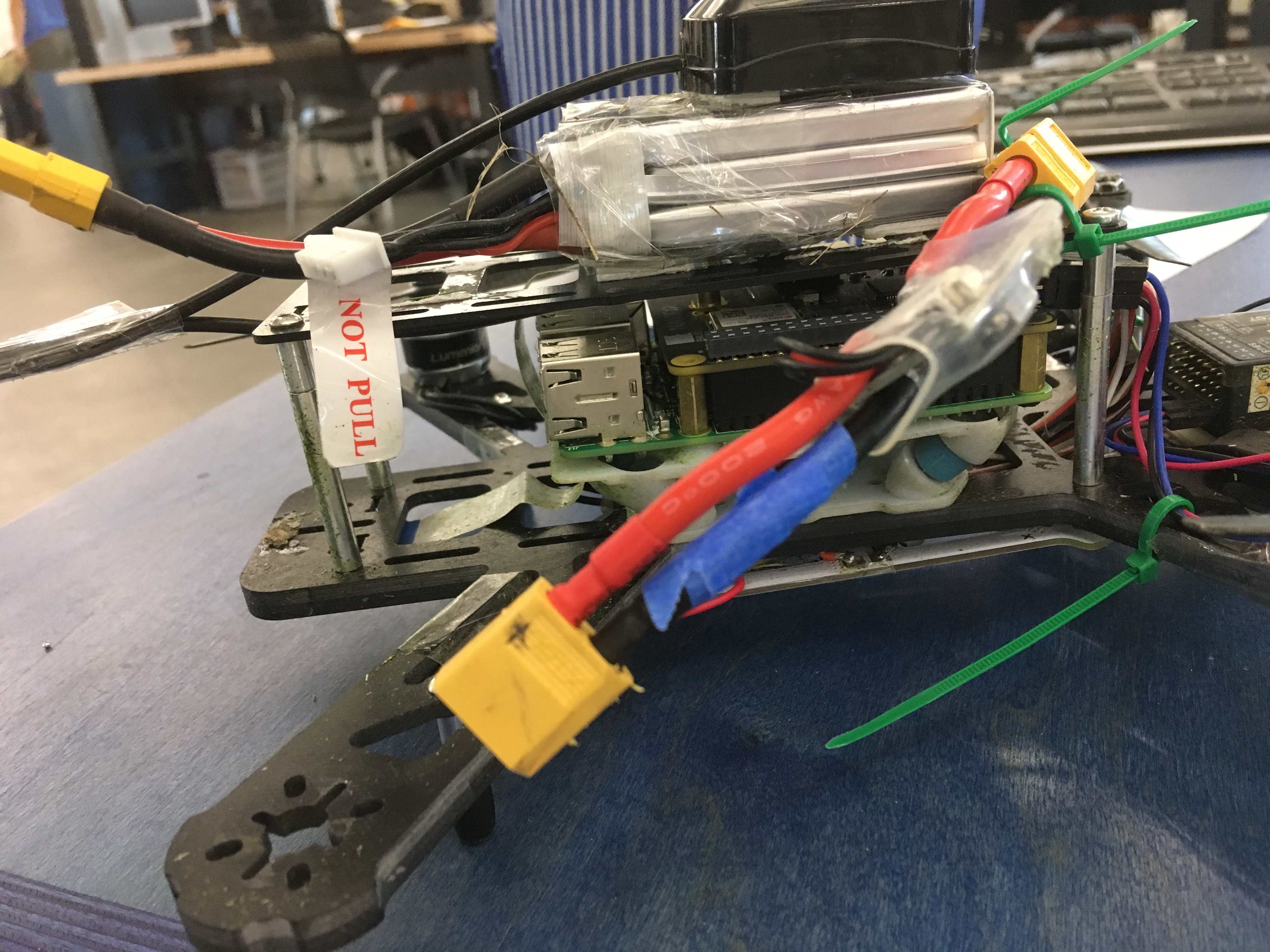
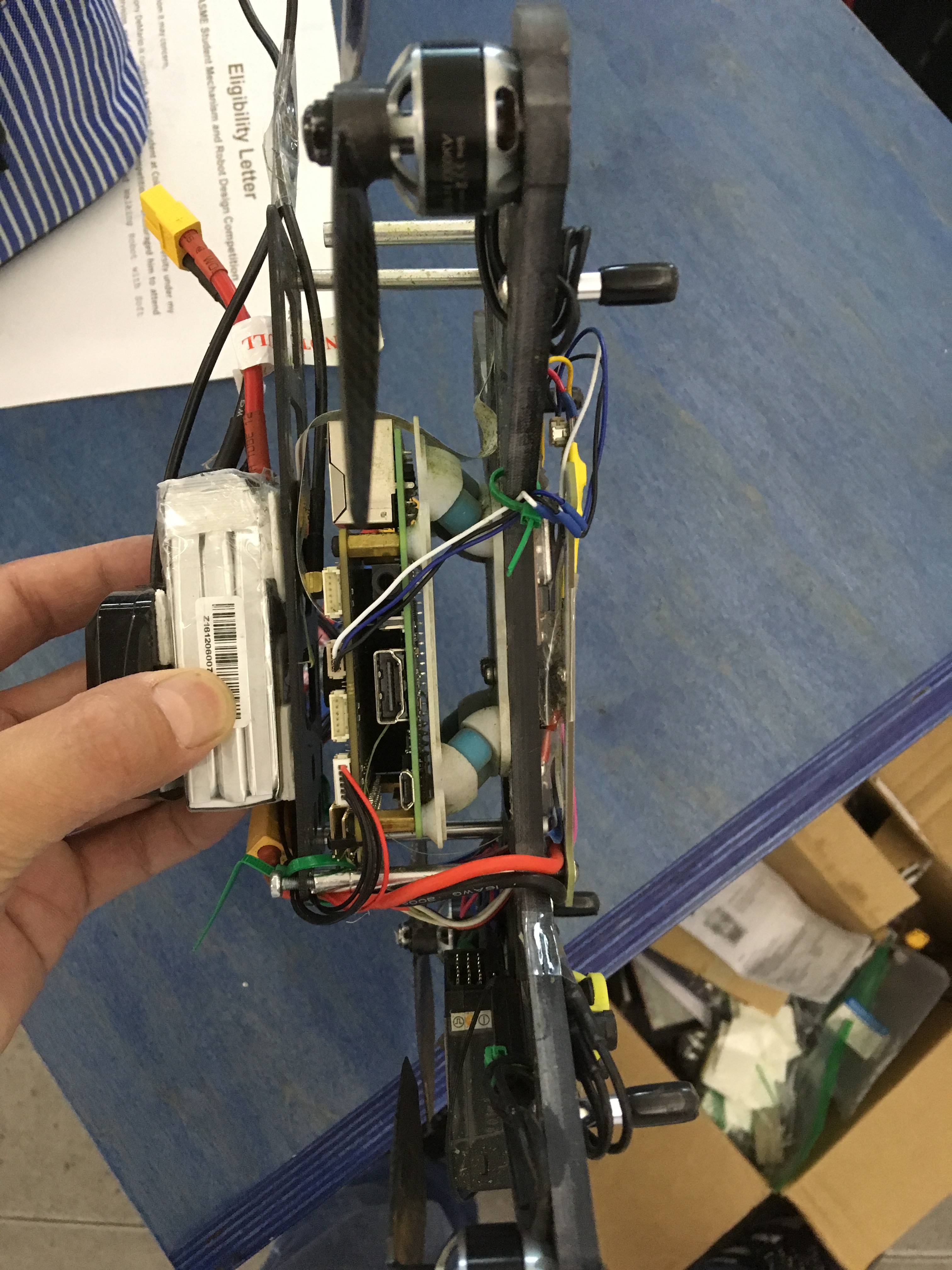
- Fix your Navio2 will all 4 screws, I can see from pictures that at least 1 is missing
- Shield RPi camera as it causes interference with GPS, there are many topic on this form on how to do it.
Thanks. I will try those