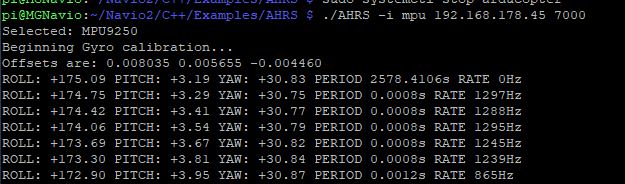
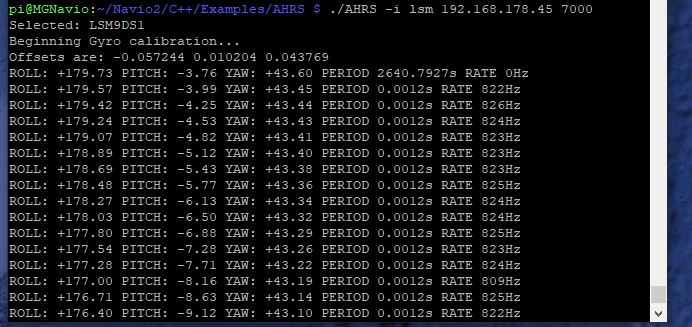
Could you please run the AHRS example from our docs and share the screenshot with the result? Also, hardware setup photos might help us to eliminate the hardware-related issues.
I’ve noticed that the barometer is not covered with foam. I recommend doing it as advised in this guide.
Also, could you elaborate on the conditions where you perform your calibration? With that, we can understand what might be the reason for the errors you have.
I hadn’t covered the barometer with foam because I thought that having a cover that closes the flight control board compartment the coverage was not necessary. In anycase today i’ve covered the barometer with foam.
For my test today i start in stabilized mode, take off withose problem up to an altitude of 5 meters. In hovering I only noticed a slight heel to the right. I then changed the flight mode to ALT HOLD. The response from the drone was good. It kept his height without too much effort.
In auto mode the drone flew well and return to home withose problem.
Finished the flight i downloaded the data log and the only errors I encountered was in compass offset and mag field.
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - WARN: Large compass offset params (X:61.52, Y:305.17, Z:-70.96)
WARN: Large compass offset in MAG data (X:61.00, Y:305.00, Z:-70.00)
Large change in mag_field (164.59%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = GOOD - Motor channel averages = [1260, 1266, 1298, 1304]
Average motor output = 1282
Difference between min and max motor averages = 44
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
The compass offset error might be caused by the surroundings where the sensor was calibrated. It is important to do it in the open area without large metal objects around. This guide has some valuable tips on this workflow. Please, check it out and try recalibrating the compass again.
Another reason for such behavior might be that the Navio2’s compass placement. Onboard electronics of the particular drone might affect the Navio2’s onboard compass performance. That varies from one hardware setup to another. In some cases, it is worth checking out the possibility of using the external compass.