After countless hours and multiple systems and Edge hardware systems, we have come to the conclusion that the GPS/Mag system is not robust and should not be used! There appears to be a GPS Glitch that occurs very soon after takeoff completely unannounced that will cause the system to have a large discrepancy between GPS position and EKF position. The aircraft will translate quickly and is completely uncontrollable. The most recent hardware was a $25,000 multirotor that crashed because of this glitch. After going through the log files the best estimate is the compass and GPS glitch very soon after takeoff causing a large variance in the EKF estimates. This glitch is not handled well, as it should be in the firmware, leading to the instability.
We have also had power modules fail by simply plugging them in, and constant dropouts of GoPro streaming.
We will no longer be using such products from Emlid, as a $800 should be far more reliable out of the box.
I can not share publicly, but would be more than happy to send it via email. Please send me an email and I will send the log file from the most recent incident. My email is fieldstd@umkc.edu.
If you have a video that would be great. We are diligent about our calibrations and failsafe checks. What we have found is that once this system gets the glitch, we can not get rid of it thereby rendering the equipment inoperable.
On RCinput graph I see that you pushed down throttle stick at one moment (blue line - RCIn3) and after that copter fell. What was this action for? Can you describe actions of copter at this moment with more details?
GPS glitch appeared only after the fall. There are also warnings about ground mag anomaly. Do you have some high voltage cables or steel structure near/under flight area?
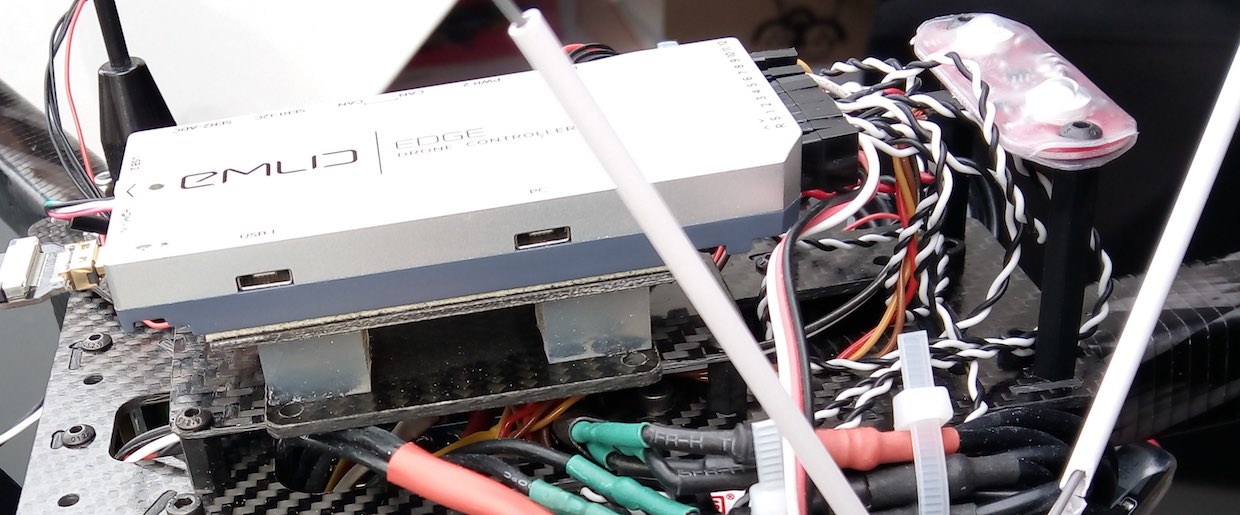
The autopilot is isolated with thick foam tape for mounting, although we have also tried fully isolated vibration dampers.
I had to force the copter into the ground as it was translating in a direction at full speed and I had no control authority to change the systems direction. Rather than let it continue out of control I forced the system into the ground quickly.
After we spent many hours going through the log file it appears the single mag that is used had an issue during the in-flight realignment. There are no power lines or large structure nearby, and the GPS/mag were mounted well away from metal on the airframe.
Alexey,
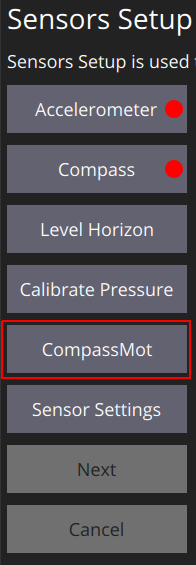
As far as we know this tool is only in Mission Planner, and we used the Emlid recommended QGroundControl. This is part of the problem I mentioned in the original post. At the price point of the Edge system and the documentation provided, it is expected to be a ready to fly system. We have done immense reading in preparation for this system (beyond what should be expected of a traditional consumer) and there still these “gotchas” that are not necessarily easy to know. This is the frustrating aspect of this system. However, I do thank you for responding to try and help address the issue.
Marc, thank you for the suggestion. That is a cool isolation tool. We will look into that.
The problem happened in Alt-hold flight mode (acc + compass) ? or Pos-hold ? (Acc + Compass + GPS) ?
If the problem happened in Alt-hold flight mode, be sure, is compass orientation problem or bad calibration.
I will do a short video tonight, how to test on the ground, but I know how to simulate only using mission planner.
Other thing, when I tried the “Compass2” as primary following the DOCs , all my drones switch to safe-mode ( “fast” Land ) when I switched to Alt-Hold, I fixed this using Primary Compass = “Compass1”, I have no Idea if this configuration is different here in Brazil, but I never had this problem again. I have more than 5 drones using Navio2 without problems (but I don’t have EDGE).
Regarding the vibration, sometimes the vibration levels looks really low, but the frequency of the vibration is really bad for the board, try to change the “absorber”, maybe is too soft, five years ago happened with one off my drones, “absorber” too soft.
ops sorry, I forgot, other very good way to test without risk, is “invert the propellers” , your drone will stay on the ground, and you can test all the flight modes with motors spinning, but without any risk, only take care with the propellers anyway
But this is required only if you have interference on the compass from the motors, power wires, etc. I didn’t see your location of GNSS so I suggested that this may be a problem.
Wrong fly direction was because of incorrect heading? Does copter have circling (aka “toiletbowling”)? How do you calibrate compass (indoor/outdoor)?