



I have done all the setup listed in emlids docs. My qbrain esc is connected to navio+ via the pins. But when i try to connect my battery to me setup my esc starts beeping. I looked it up in the manual and it said that it means that throttle signal is abnormal.
Also the esc and the power module started getting a bit hot when they where powered.
I calibrated my esc with a servo tester and it worked just fine but when i plugg into navio i get all these errors
picture of my setup:
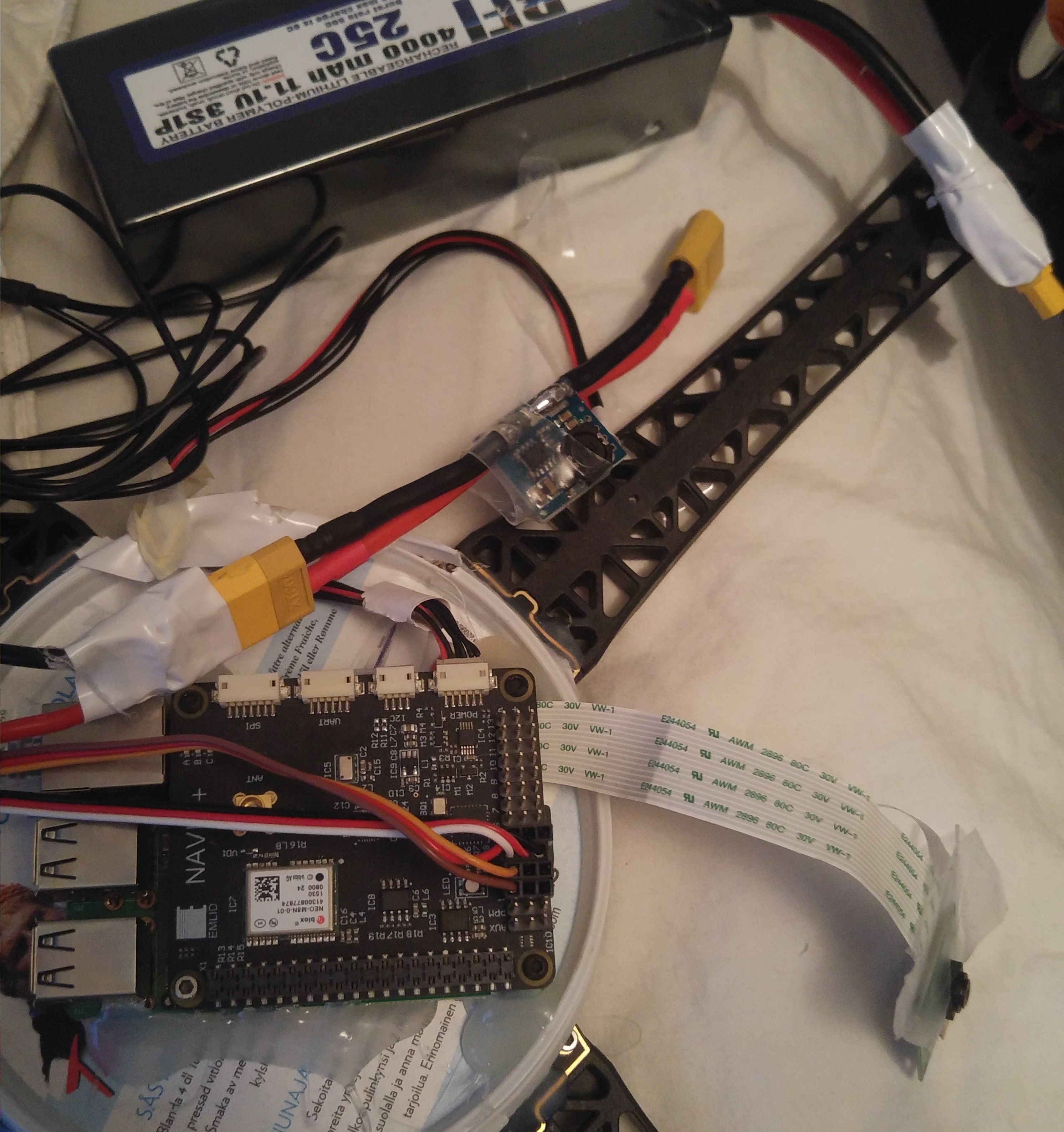
btw the connectors are soldered underneath the tape
Have you calibrated you radio?
I notice tape on the connection cable between the power module and the Navio. Did you solder anything there? If so, how did you isolate the individual wires? I also notice the clear shrink tube on the power module is partially removed and there is tape on this side of the cable, too. Make sure you do not have a short between the wires. On the Navio side the rightmost wire connected to the power port, seems to be pulled out of the plug a bit. Check every connection for short circuits.
And please, use shrinktube to isolate the cables going to the XT60 connectors. Your tape does not even seem to stick to well. If you get a short directly on the battery wires, you might get a strange smelling bonfire, instead of a flying copter.
If you calibrated your ESC with a servo tester, it might be that the zero throttle PWM output from the Navio is to high. My servo tester has a PWM range from 800 to 2200us. I can´t look for it now, but I think APM default zero throttle value is around 1000us. The ESC will beep waiting for the calibrated zero throttle signal, which it does not get.
Thanks for all the replies 
I will try to recalibrate my esc but the problem with the hot power module and esc will probably remain.
FYI
i don’t think the soldering is the problem. Because it worked just fine with my servo tester, also i tested the output voltage and the resistanse between each wire and the seem normal
again thanks for the help 
Can you measure the output voltage on the power module? Between first and last wire in the connector.
If i put the wires into a servo tester i can controll the motors, that’s with the exact same setup except for the esc wires going to the servo tester of course. The output voltage is 11.48v.
I think the problem is that i did the wiring wrong. Which pins do mission planner use to output ppm?
It the output of the power module to Navio+ on the DF13 connector 11.48V?
Calibrating the ESCs with an external tester will not help you… the ESCs need to know what the lowest level of the Navio+ output is, that is why you should do the ESC calibration through APM.
When the calibration is done through APM and the board starts up, the output to the ESC are at a specific level. Since the ESCs know what that level is, they will startup correctly.
If you use an external servo tester, you do not know what the output for the low calibration really is, so when you hook them back into the Navio+, it is probably outputting a higher level and your ESCs think that the throttle is abnormal, thus they will not arm.
Dale
Thanks for all the replies. I will try to redo the calibration through mission planner. Also the output from my XT60 connector is 11.48v, which is going to the esc. I don’t know how to measure the DF13 connector output.
But i still don’t know what pins on the navio board mission planner uses…
FYI:I have a radio but i don’t want to use it, it’s supposed to be a 4g drone
what do you mean?
I posted a response in the wrong thread…
Dale
i still don’t know what pins on the navio board mission planner uses…
It has nothing to do with missionplanner. All pins on the servorail are labelled. PPM/SB is for RX connection. Pins 1 to 14 are for ESC/Servo connections. Here is the page showing were to connect each esc/motor:
http://ardupilot.org/copter/docs/connect-escs-and-motors.html
I really would advice you to use a radio for first setup, it makes things a lot simpler. You can always fly your copter over 4g later. Also keep in mind, that you are required to fly within visual range and with a dedicated radio control as a backup in many countries.
1 Like