I am currently setting up a F450 frame, first time build, to support autonomous missions. I launch and run my missions out of VS Code using python and connect through telemetry. I use Mission Planner for configuration and tuning, but I also use it for troubleshooting.
I have noticed that my drone tends to read a negative altitude. This isn’t a little negative either, I will barely pick up the drone by hand and it will read -1, -3, -4, -5, -10, -15, -25. At first I thought the vibrations were screwing with it so I resolved that issue. I am doing all of my testing without propellers on. Right now inside my house the program works fine. I tried to get my data flash logs via Mavlink but I kept getting a timeout error.
Here is a tlog from yesterday that shows the altitude at the end of the run.
link to all logs available, not necessary to go through.
I have had this error in three locations. Right now at my house it is working in my visual code, correct altitude but throws that error sometimes. At school and at the park it shows the negative altitude. At school I had a lot of compass, mag and other errors as well. At first I thought it was the buildings, but I moved out into a field and had the same errors.
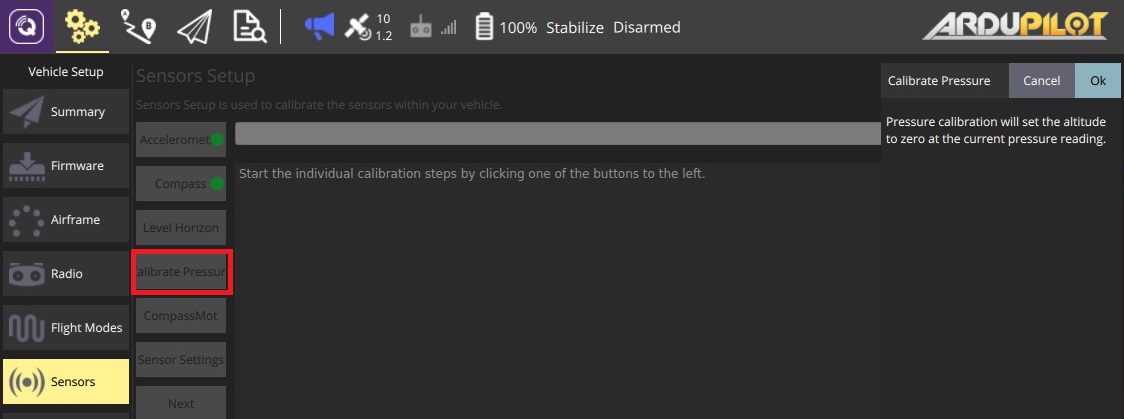
I am just wanting to know what some possible issues may be, some resolves, how I can get back on track to not having to worry about my drone shooting 25 meters in the air to offset the difference and then turn off at that height because it thinks it hit zero. I am on a limited time frame with this project and I would rather not swap to a different flight controller. Yesterday I did a complete reinstall, default params and new calibrations.
I setup my drone using this guide Introduction | Navio2 and I found out how to set things like not having to use an RC controller through community forums.
Current parameter list
Software:
Mission Planner 1.3.7
Arducopter 3.6.11
Hardware:
Raspberry Pi 3 B+
Navio2
Readytosky 3DR Radio 915Mhz Telemetry kit
Goldbat 3000mAh Lipo 30C
EMAX 2213-935kv
30A ESCs
1045 Props, currently not on frame