Hello community,
Can anyone please help me, how to get fix solution for drone ppk data processing as am using M2 as rover getting float solution n times.
Hello community,
Can anyone please help me, how to get fix solution for drone ppk data processing as am using M2 as rover getting float solution n times.
Hello, please provide us with some details to start helping you !
What is the base, is it yours, is it a CORS ?
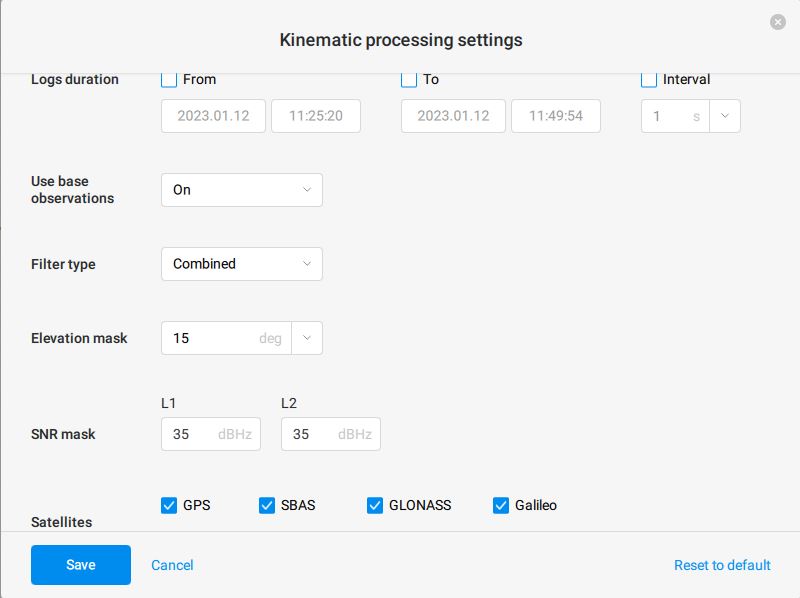
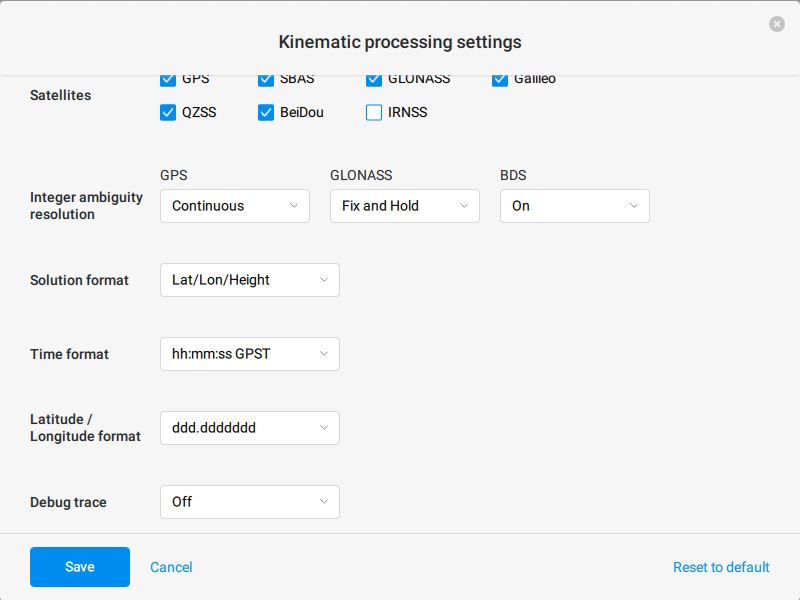
Do you use Emlid Studio ? What are the settings ?
How do the raw data look like in Emlid Studio when you drag and drop the obs RINEX file in the view window ?
Have you done a 5-min stationary observation session before and after flight to help fixing the ambiguities ?
Hello Florian Thanks for replying
Looking forward for the help.
Thanks!
Hi @parth,
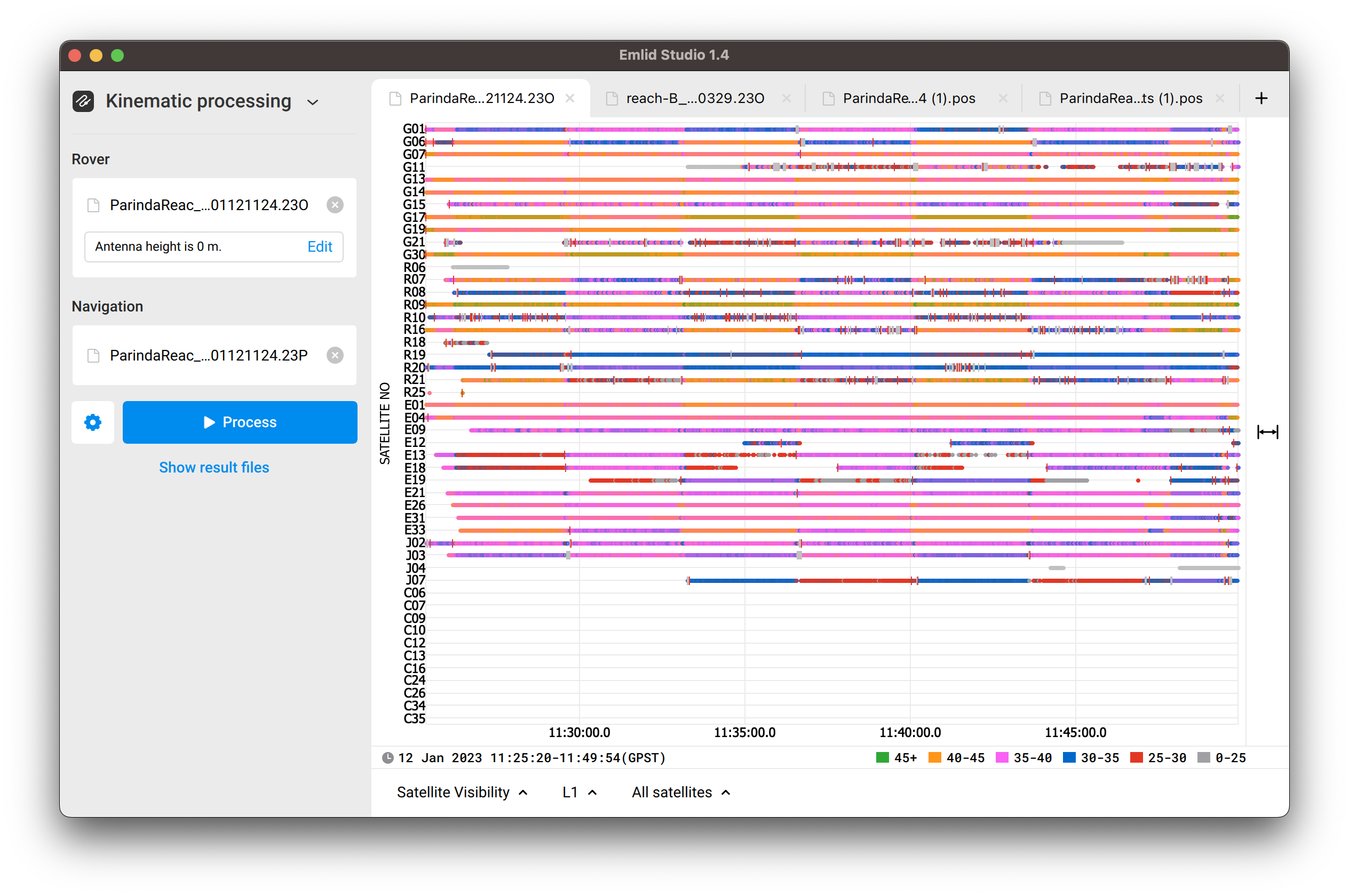
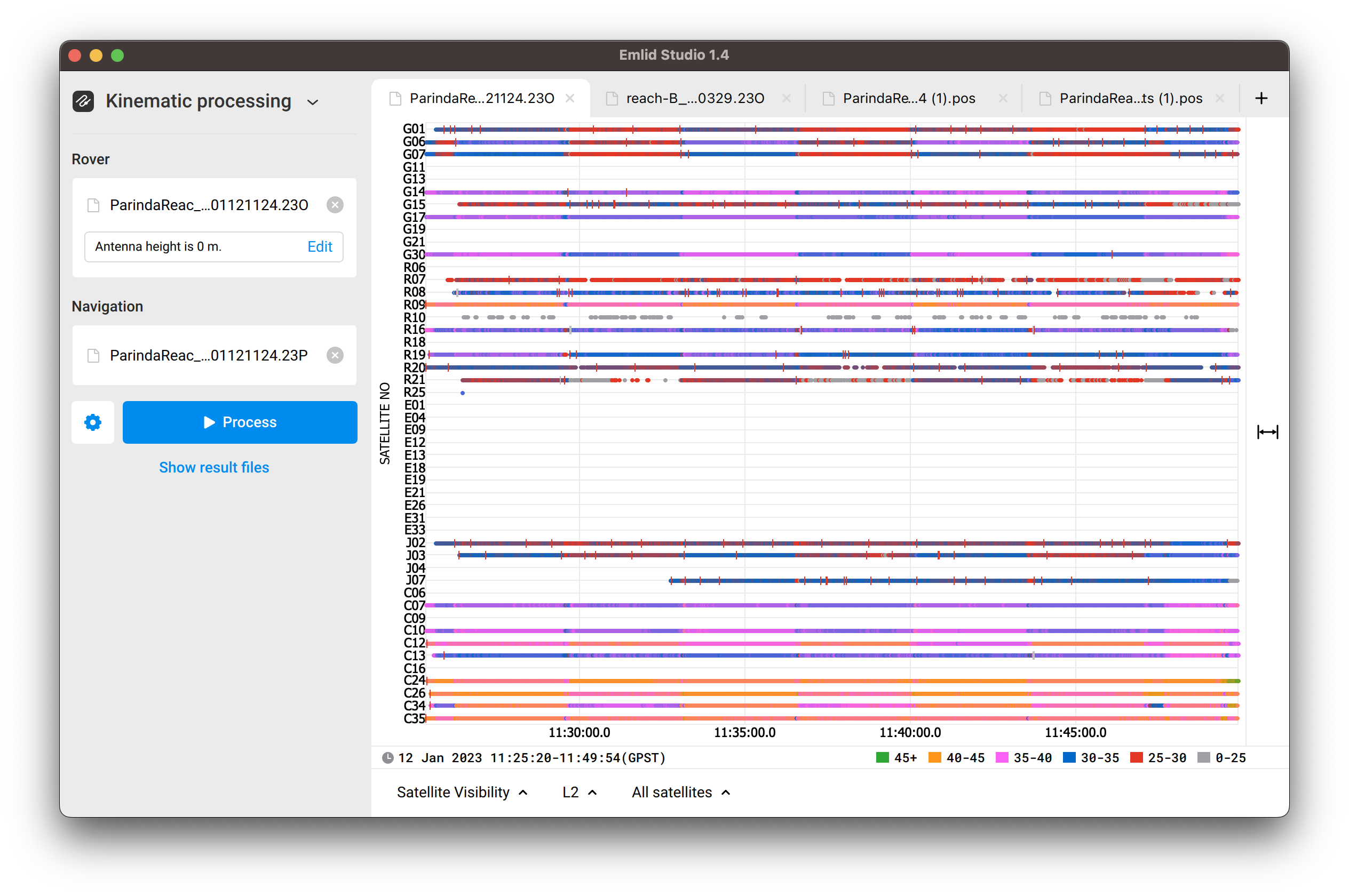
I’ve checked your logs, thank you for them! The reason for 100% FLOAT solution is poor quality of the rover log. Take a look at these screenshots below:
There are many red bars that mean cycle slips. Cycle slips appear in the log when the signal is interrupted or there’s substantial interference nearby. Furthermore, I see that SNR value fluctuates periodically during the whole log: purple string changes to blue string and back. It also shows that the receiver is affected by RF noises.
To reduce interference impact, you need to isolate Reach M2 from all potential interference sources as much as it’s possible. On top of that, you can wrap it in the aluminum foil.
Please share your hardware setup photos. I’ll take a look at them and will be able to provide you with more exact recommendations.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.