Would you please give some idea on how to resolve the issue with quad copter not taking off? How do I configure PWM pins on Navio2 in Mission Planner? I checked my motor direction and props and everything looked correct. The props are spinning but drone is not taking off (Leans to one side). Is this because the PWM pins were not configured correctly?
Check the physical orientation of the Navio2 (position within quad copter/horizonal/pointing forward), then check settings within Arducopter and run calibration
Please share a video that shows the drone’s behavior when you set it to take off. Also, I’d need to check the dataflash logs from Navio2. You can download it in Mission Planner.
I’ve built this drone using Navio2+Raspberry4 and am using Flysky FS-i6X RC transmitter with FS-iA6B receiver. I have Hobbypower SimonK 30A ESC Brushless Speed Controller BEC 2A and Emax MT2213-935KV 2212 CW CCW Brushless Motors installed.
Would you please look at the dataflash log and let me know what is causing this issue and how to resolve it to fly my drone? Also, I was NOT able to fly this drone from Mission Planner so, I selected “Compass and Motor Calibration” menu from Mission Planner and used RC transmitter to try to fly this drone, but it crashed as shown in the video. I did Acceleration, Compass, Radio, ESC calibration, and tested motors successfully. If I missed any other configuration, would you please let me know?
Hi,
had a brief look at your .bin file.
Your FC suddenly changed to guided mode. This is not suitable for a first flight.
Also noticed some odd mag-field and vibe readings.
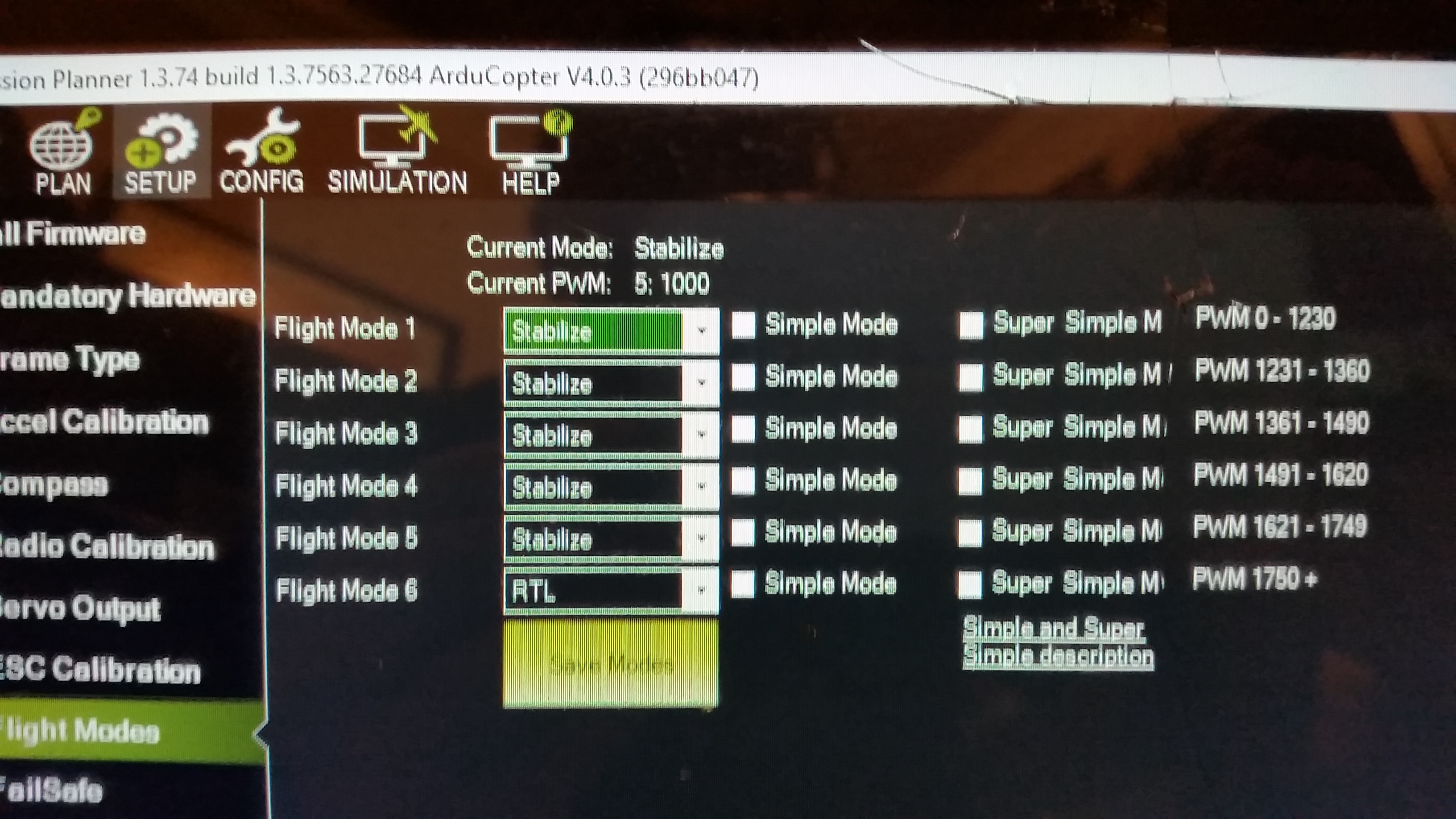
Have you done basic calibration? Have you set up rc signal in MP ? Have you set up flight modes to suit?
There must be a reason why FC changes suddenly to guided mode. - Hence check and if necessary repeat basic calibration.
Just noticed there is also a rather unusual change in FC processing speed at time mode change occurs.
Any faulty contact somewhere? Do you have dual power supply setup correctly as per instructions? I.e. not just using the power adapter but also a power supply to servo rail? https://docs.emlid.com/navio2/ardupilot/hardware-setup/
Whilst there is no sign of voltage drop that doesn’t fully exclude an issue with supply to FC. ( a micro second drop in voltage which may not be recorded by system).
There have been cases where a faulty micro-SD card prevented or delayed saving of data and hence delayed the FC in processing data. Is your SD card new? is it a fast 10 rated card?
I have a new 128GB SD card installed. I wish I could answer all your questions, but I am another newbie to Navio2+RaspberryPi and hardware in general. If you provide me specific instructions on what needs to be done, that’ll be great help.
Would appear it is likely to be linked to a poor performing micro sd card.
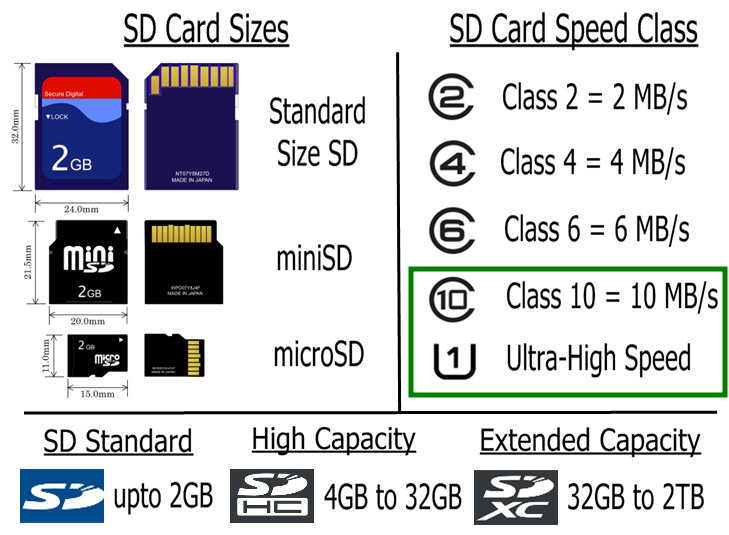
Not every memory card is the same. The basic ones (usually the cheapest ones) have a very slow read/ write speed and hence take longer to retrieve and write data. - have a look at below table.
A good sd card has usually 10 or U1 written on it whilst cheaper / slower cards often don’t have a number (other than storage size) written on it so it doesn’t give away how bad / slow the card is.
You definitely want a very fast card in order to avoid delays in the read/write process during flight. Keep also in mind that it is not just the FC requiring access to card but also the RPi as it also saves & retrieves certain data to card.
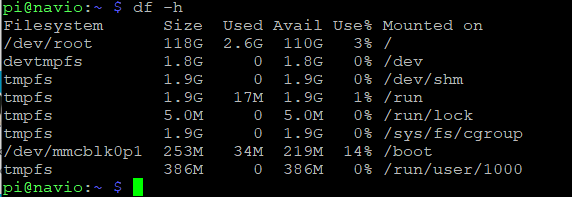
Another thing,…just to make sure, you have expanded file system on card with sudo raspi-config --expand-rootfs as described at the bottom of page: https://docs.emlid.com/navio2/common/ardupilot/configuring-raspberry-pi/
?
I have Samsung 128GB Evo SD card and below is the link:
Do you think this micro SD card might cause an issue with my Drone not taking off?
By the way, I already ran the command when I set up RaspberryPi+Navio2 at the beginning to expand the rootfs file system on card as directed and have uploaded the output from “df -h” command:
But assuming that card formatting is all good then we need to find what is slowing the FC down. Any additional software you are using ? Changed RPi settings? Any additional software for WiFI communication?
If I was in that situation I would start drone without flying and just spin propellers slowly and give some simple yaw/ roll and pitch commands over a few minutes. Then check the .bin file in order see if any further delays are encountered.
I had a similar problem earlier this year and couldn’t find the cause at first. But after re-installing the Navio firmware the problem was gone. So somehow the system files or something got messed up after an update or a failed data write attempt and only after a complete re-install things got back to normal.
After re-conducting compass calibration and ESC calibration, I was able to fly my drone first-time. Also, I noticed that two screws in the #2 wing were missing and I screwed them tight and I think that resolved the issue with learning to one side.
I’m pleased to hear that. Good news.
But if I may suggest keep an eye on the response time of your drone during first few flights as the time delay in FC processing still isn’t explained.
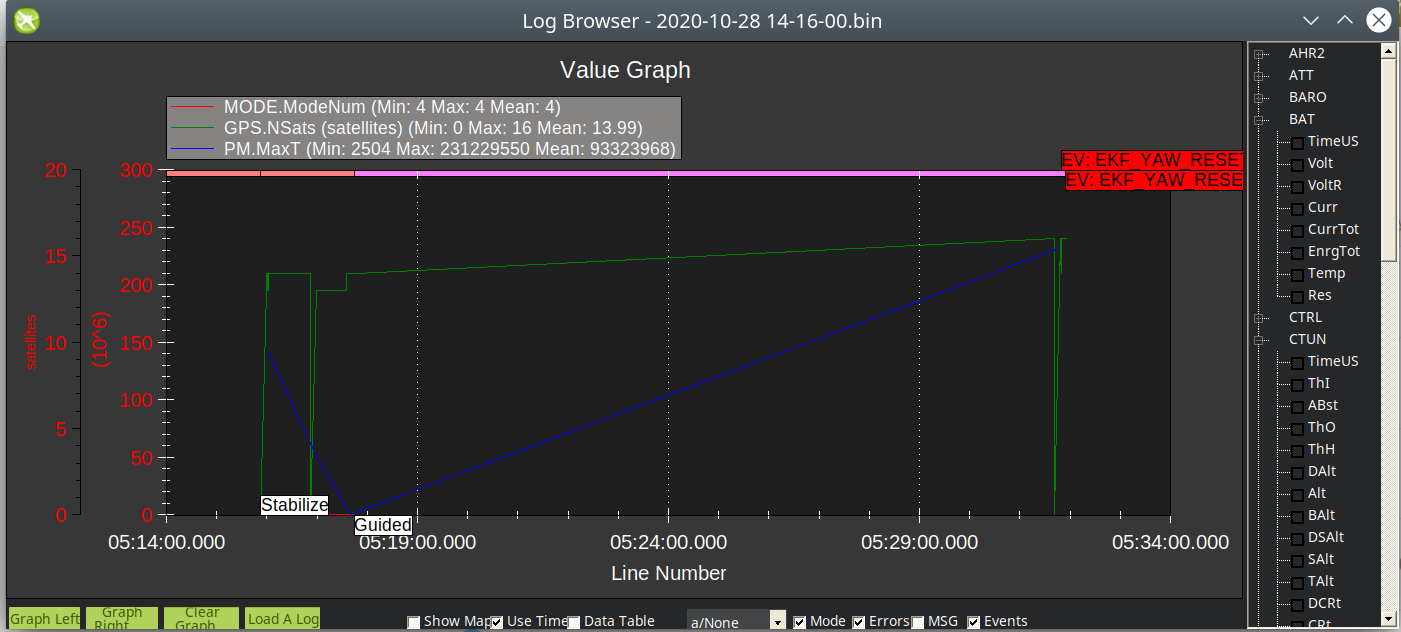
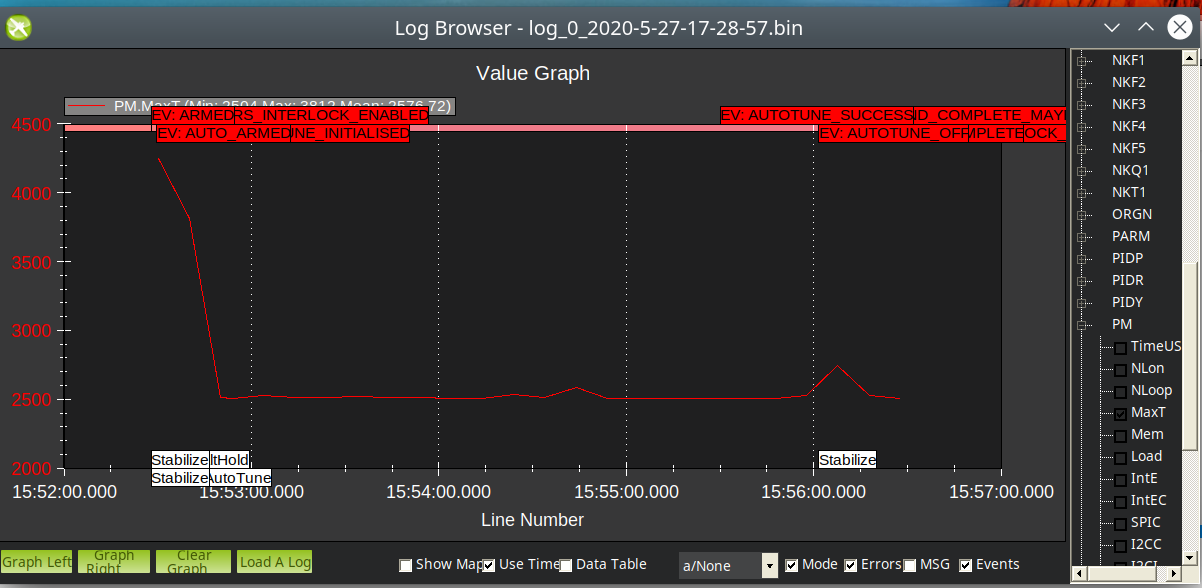
With a bit of luck it was just a glitch caused by excess vibrations (sensor overload) and now with everything in place it may be all back to normal. You can check yourself by looking at the .bin file using MP and the “Review a Log” button in the “Dataflash Logs” tab.
Then on bottom right hand side select “PM” and then select the "MaxT’ field.
You should see straight, steady line with only minor changes. The sudden change at the beginning is normal startup of FC. (see an example below)
-Happy and safe flying-
I had my first flight a few weeks ago but am trying to understand as to why I have to increase the pitch/roll (right stick) as well as the throttle (left stick) when it takes off. I thought that I only needed to increase the throttle (left stick) to take off, but I have to increase little bit of pitch/roll to take off in a no-wind condition. Is this normal for drones to increase pitch/roll as well as throttle to take off? Likewise I mentioned, I was able to conduct compass and ESC calibration successfully.
would appear you may have to do some advanced tuning.
You can do that manually but requires more advanced understanding of how the control system works: https://ardupilot.org/copter/docs/tuning.html
Another option is the Auto-Tune function which works best for most people. However, I would recommend to read through the initial instructions first to get the most out of it (and also avoid a potential crash ): https://ardupilot.org/copter/docs/tuning-process-instructions.html