



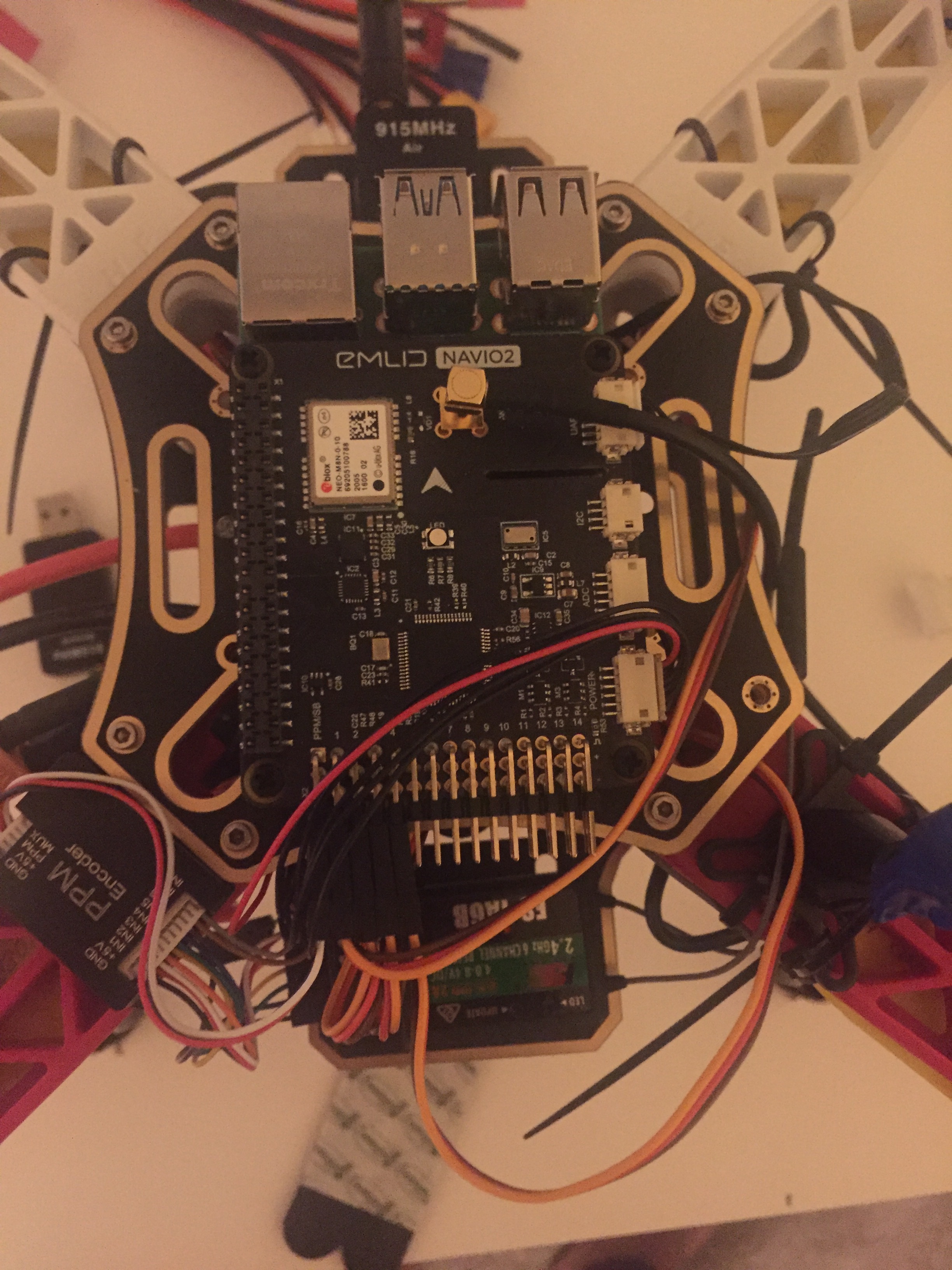
I have attached pictures and videos showing how I wired and assembled my drone. My drone keeps flipping on take off and I can’t figure it out. As I push the throttle forward, the drone over seems to over adjust or something resulting in it flipping upside down. I have looked on the forums and this issue is usually due to bad wiring but I wired it just like the tutorial said. Right front, left rear, left front right rear. all my props seem to be spinning in the right direction and they are pushing air down. Does anyone have any ideas? Any help would be much appreciated.
Hi Frederic,
Thank you for the thorough description of the issue.
Could you please share the dataflash logs according to that guide? It would help us to look into the issue deeper.
Is this what you need?
2020-08-17 21-15-23.tlog (67.4 KB)  2020-08-17 21-26-34.bin (869.1 KB) 2020-08-17 21-26-34.log (1.8 MB)
2020-08-17 21-26-34.bin (869.1 KB) 2020-08-17 21-26-34.log (1.8 MB)
Log File C:\Users\FriedrichChristopher\Documents\Mission Planner\logs\OCTOROTOR\1\2020-08-17 21-26-34.log
Size (kb) 1827.1279296875
No of lines 22809
Duration 0:01:33
Vehicletype ArduCopter
Firmware Version V3.6.11
Firmware Hash 296c62b3
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (11.63%)
Max mag field length (614.98) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: GPS_GLITCH
Test: GPS = UNKNOWN - join() takes exactly one argument (2 given)
Test: IMU Mismatch = NA -
Test: Motor Balance = WARN - Motor channel averages = [1338, 1279, 1227, 1346, 1253, 1358, 1318, 1265]
Average motor output = 1298
Difference between min and max motor averages = 131
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD
Your drone is configured as an OctoQuadX (FRAME_CLASS 4) instead of QuadX (FRAME_CLASS 1)
1 Like
Hi Frederic,
Did you get a chance to test the frame class as Marc had suggested?
That was the problem! thank you both! The picture in mission planner look very similar, i guess i just missed the bottom props lol.
1 Like