Looking for some guidance whilst trying to process our drone mapping data.
We are using the Reach RS2 as base and have attached a Mettatec X5 to our Phantom 4 Pro drone.
Based in NZ, using Emlid Studio 1.7
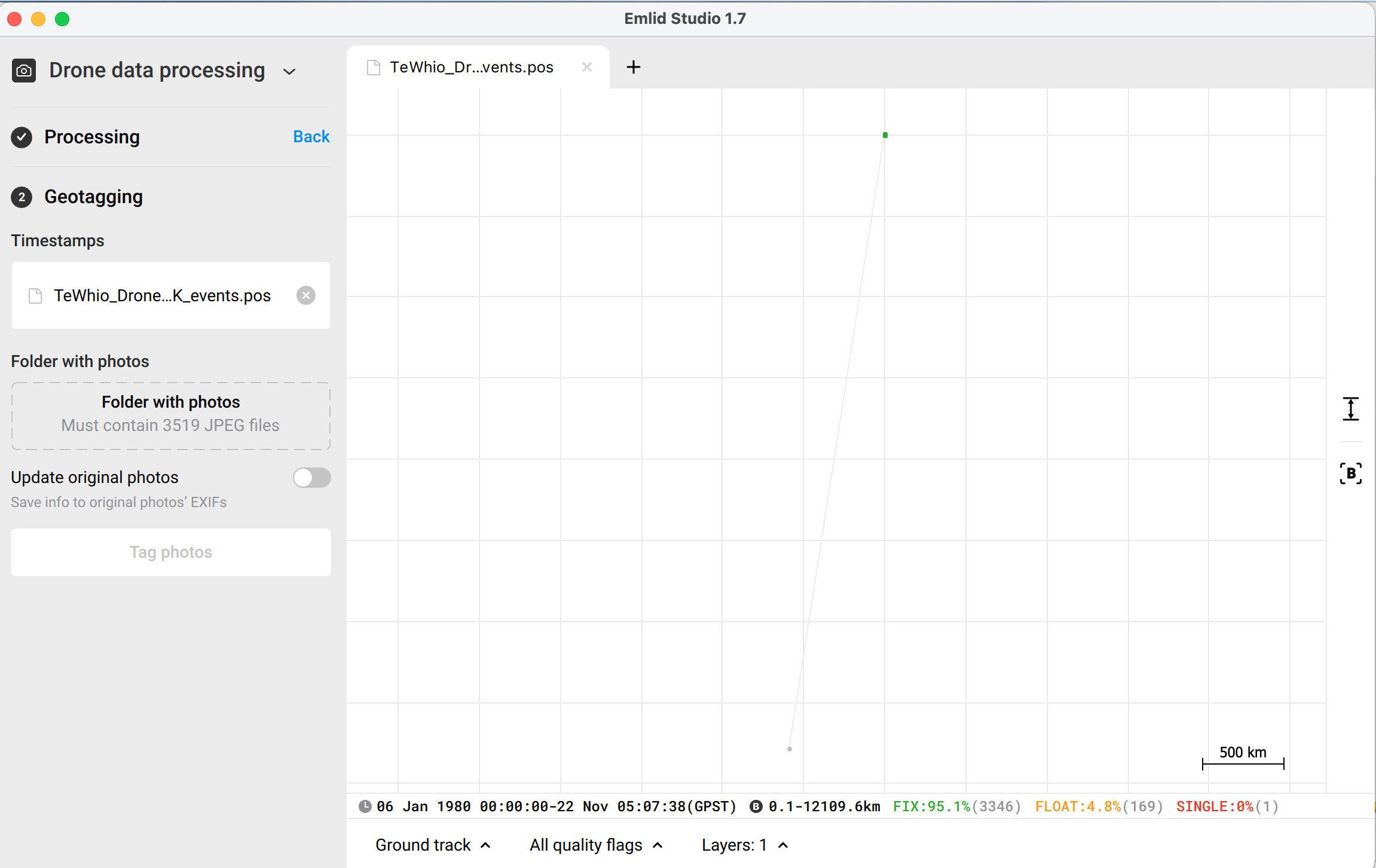
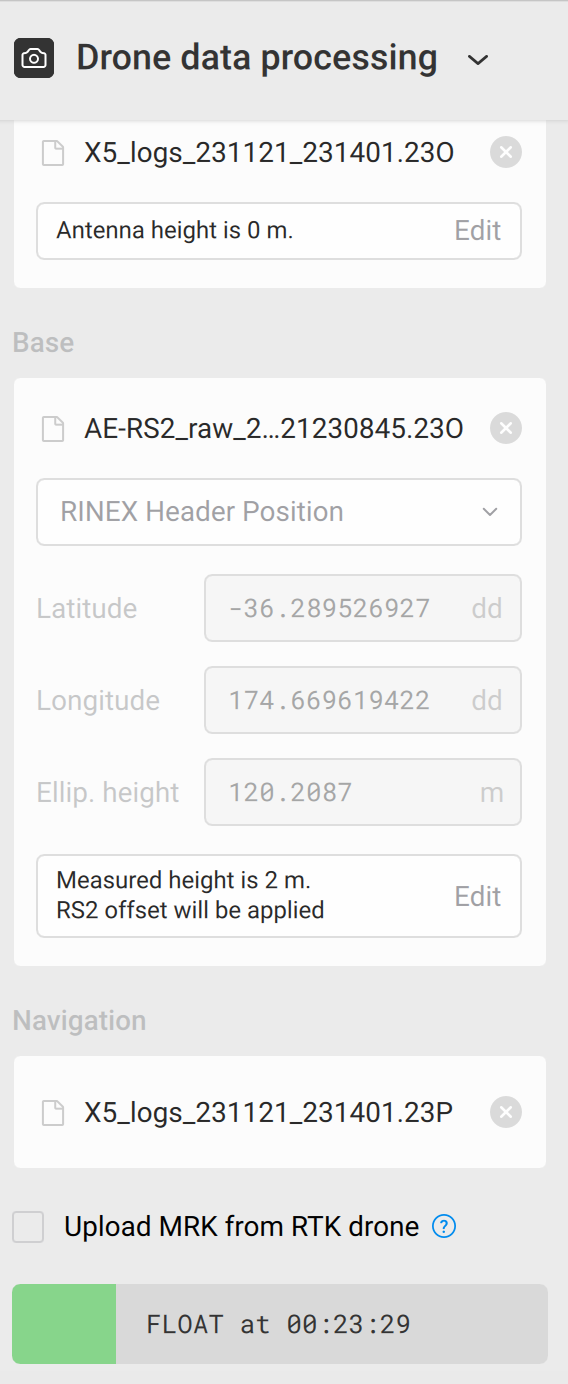
When processing with Emlid studio drone data default settings, it gets stuck a quarter of the way through at FLOAT 00:23:29
When turning off all satellites except GPS we get a 95% FIX solution.
Does anyone know why this is happening?
How can we get a 100% FIX solution, is this necessary to then geotag our drone mapping photos?
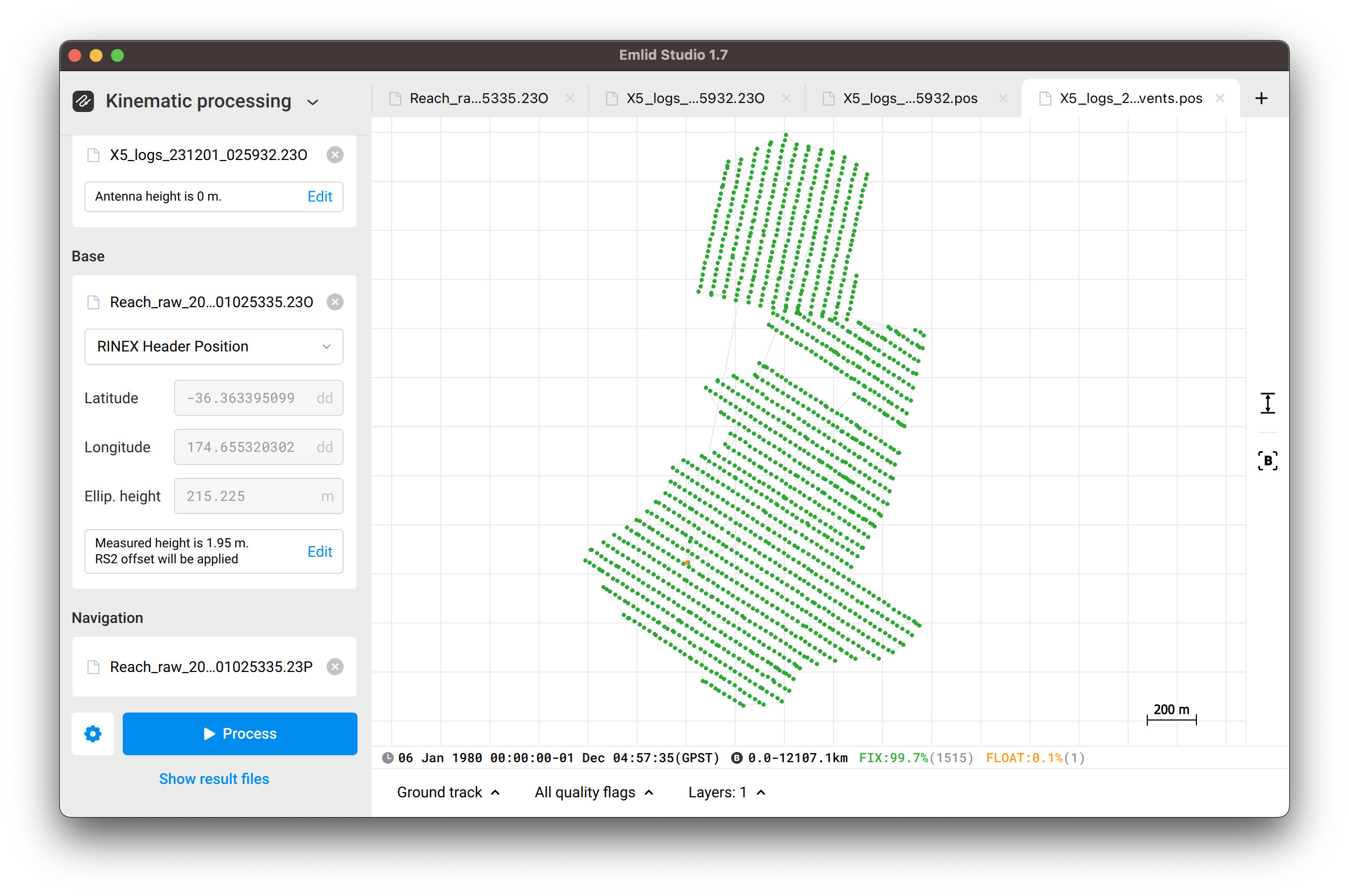
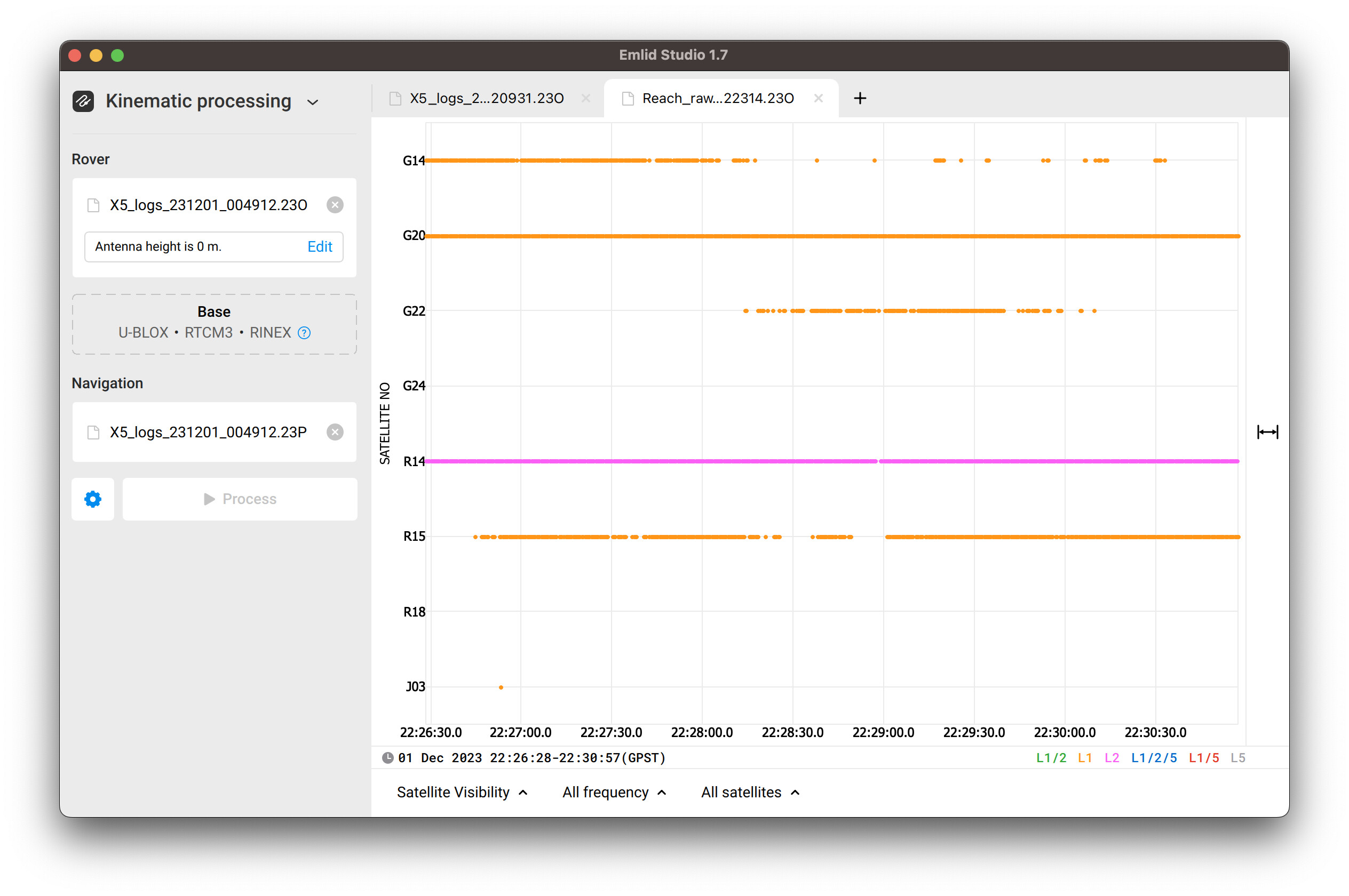
As per your screenshot, there are some weird values in the plot: 06 Jan 1980 observation start, the baseline is up to 12109.6 km. Most likely, they are related to the information registered in the RINEX header, so it’s worth looking closely at the files.
Could you please post your raw data logs or send them privately to support@emlid.com, so I can check what could cause it?
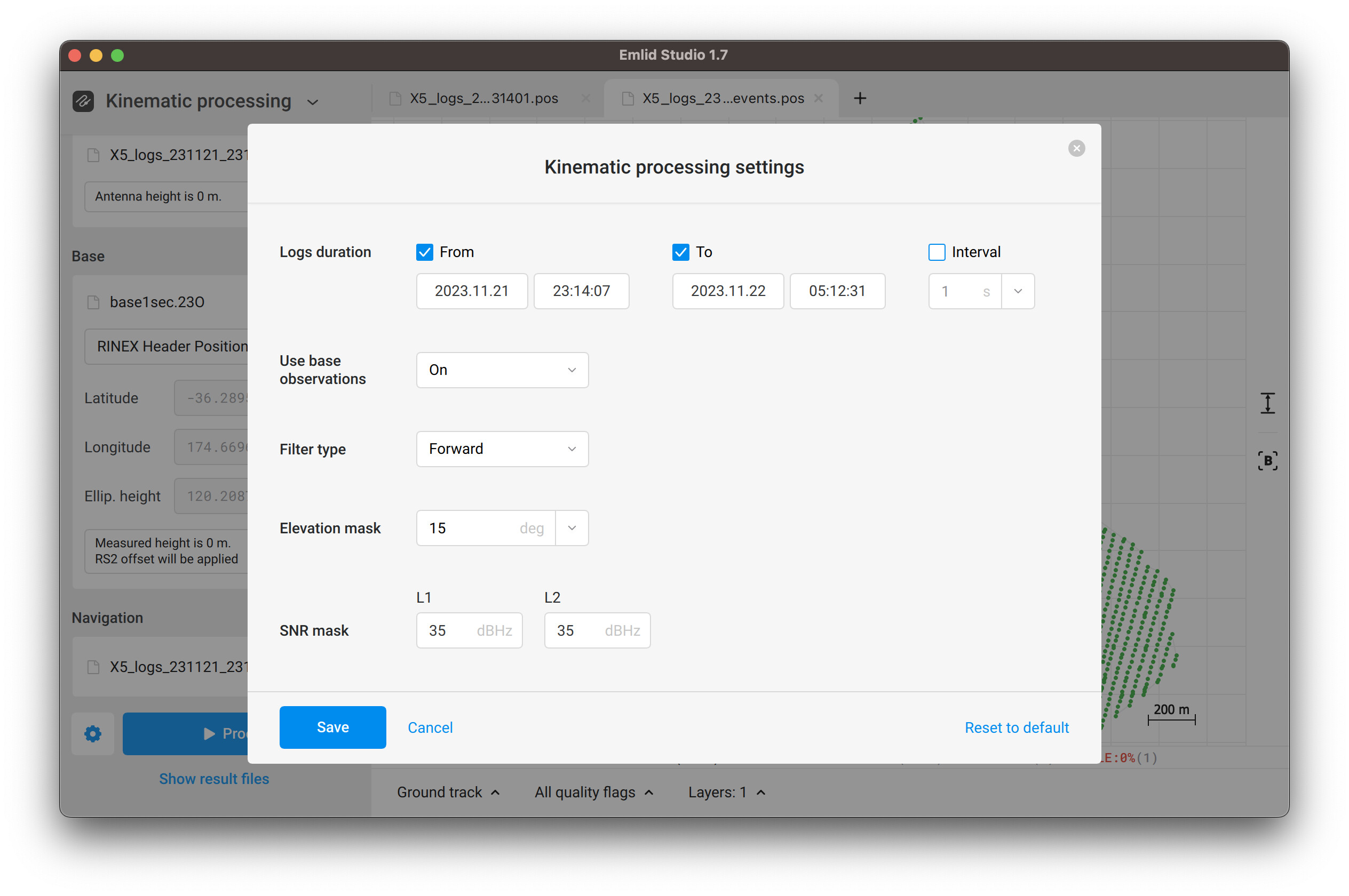
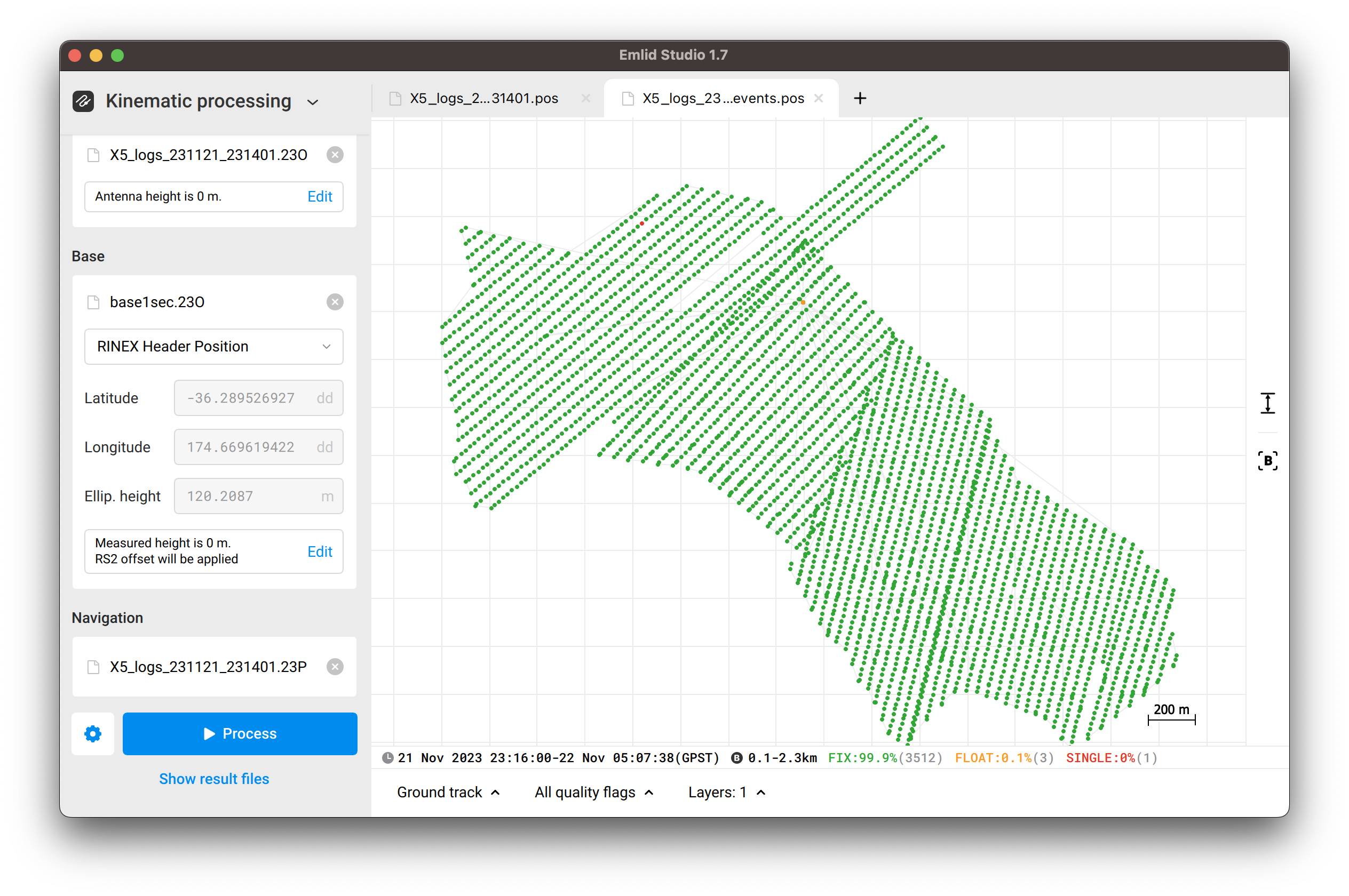
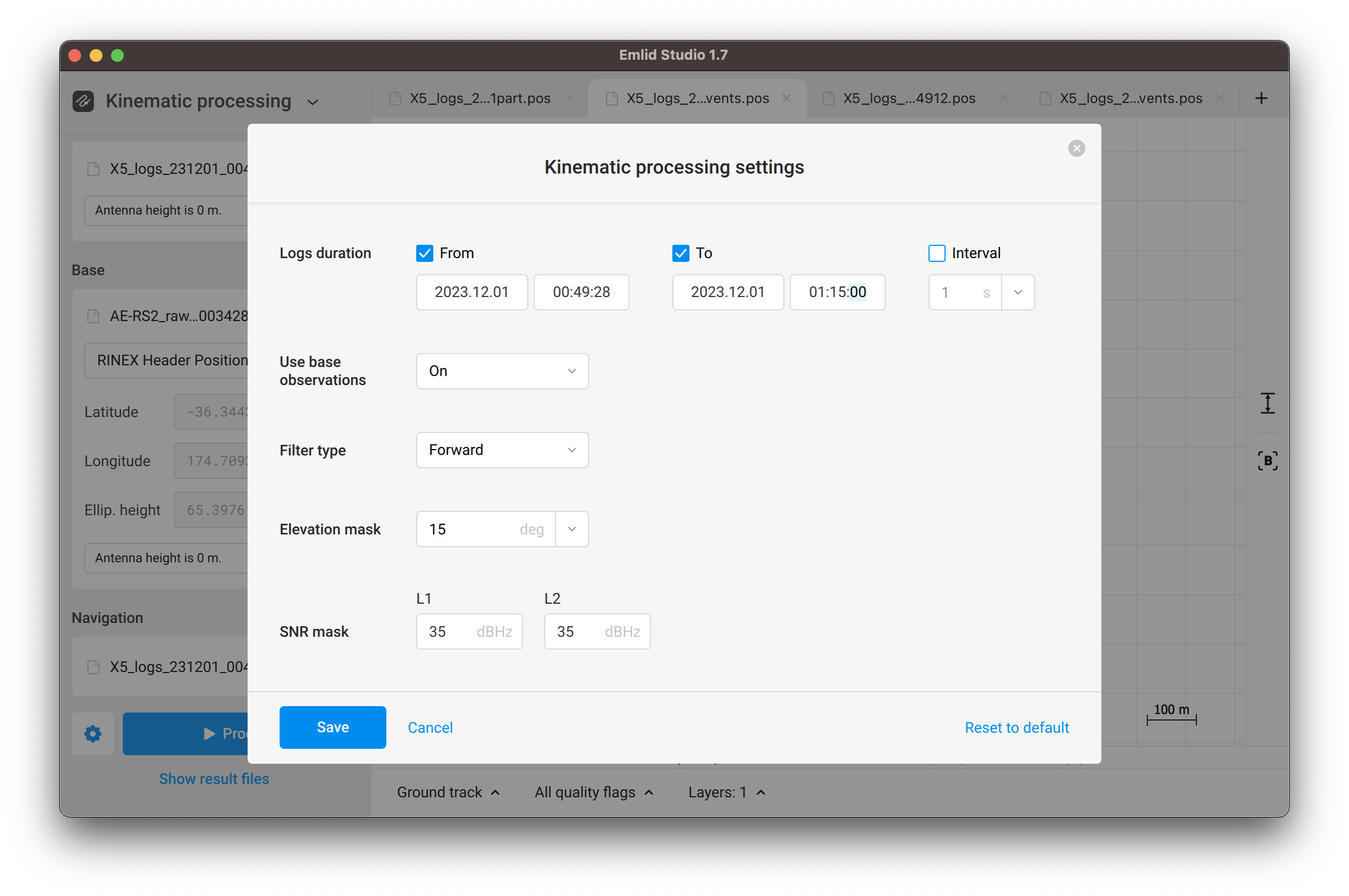
Initially, I reproduced your issue: Emlid Studio stuck at the exact second. It made me think that the software couldn’t handle such a large amount of data, so I decided to thin out the base log to the 1 Hz update rate. For processing, I ticked check boxes of the Logs duration as shown in the screenshot below:
I’ve attached both the resulting pos files
in the zip archive below, just in case. You can try to process with the same settings and let me know how it goes.
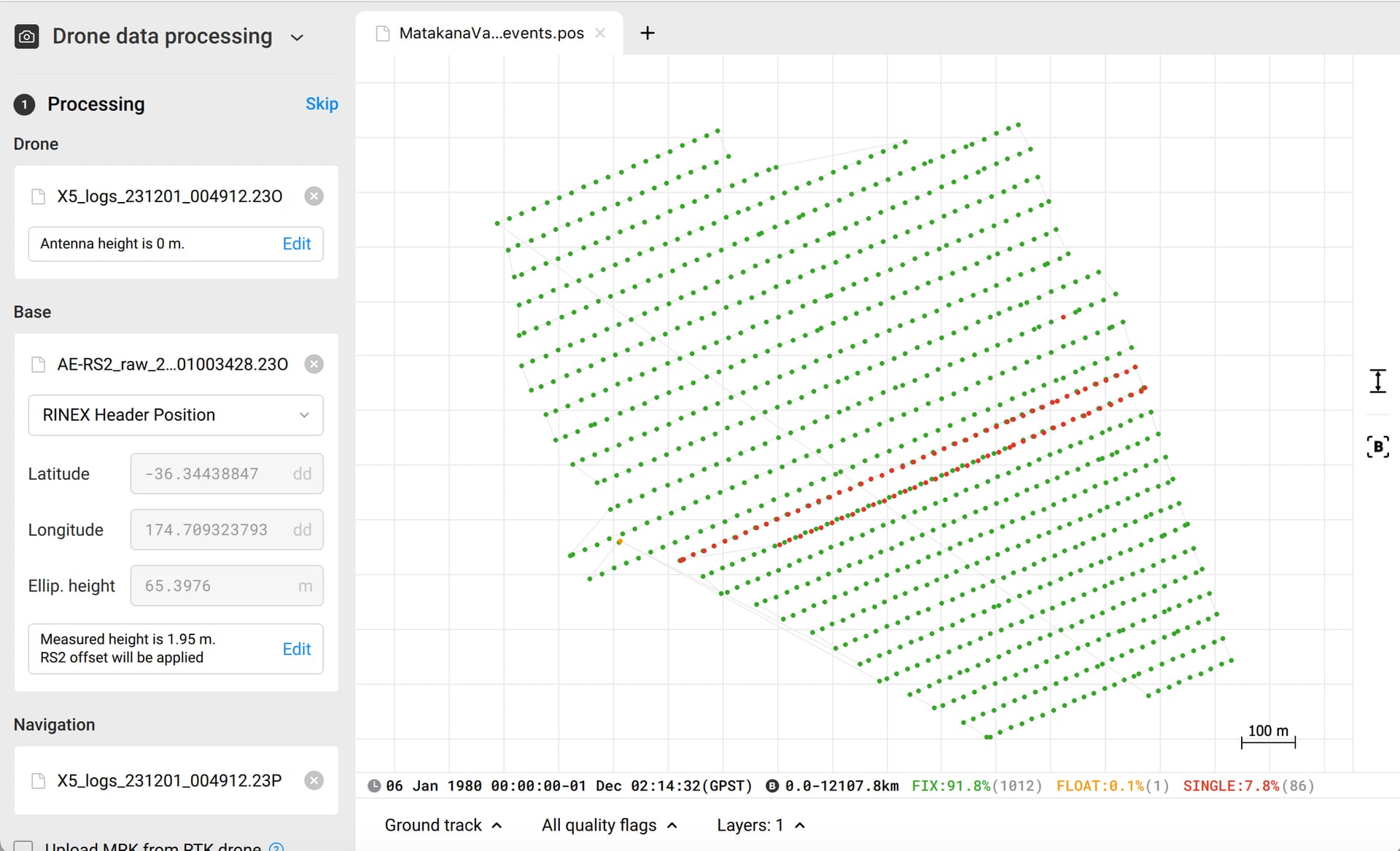
For our next project we are having similar issues, getting stuck halfway or giving inconsistent fix/float results
(I had to combine a UBX file for the base Reach RS2, hence the first screenshot having a lot of single results) but other areas are giving inconsistent results
I’ll split my response into 3 sections as per each shared dataset.
Clayden Road
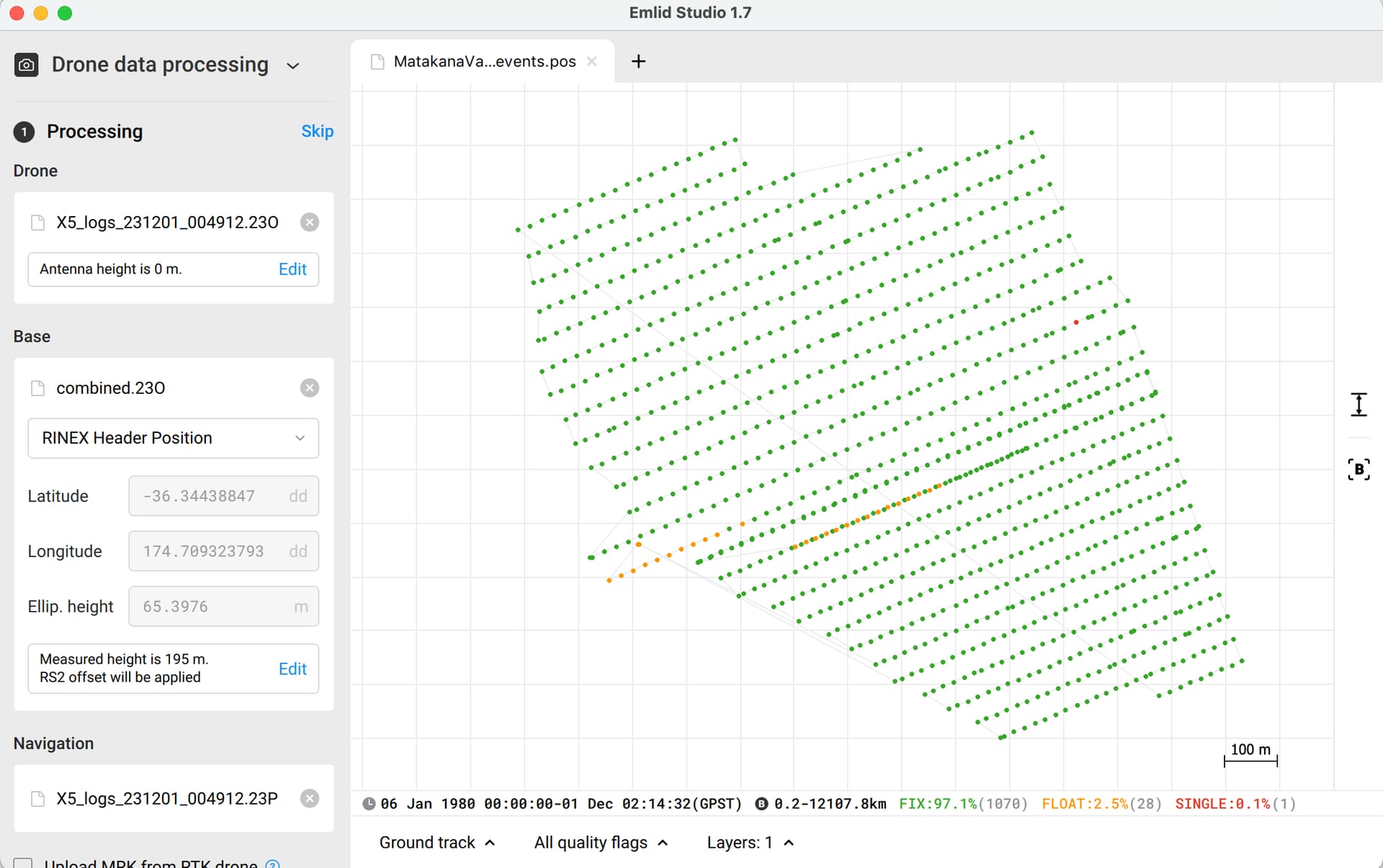
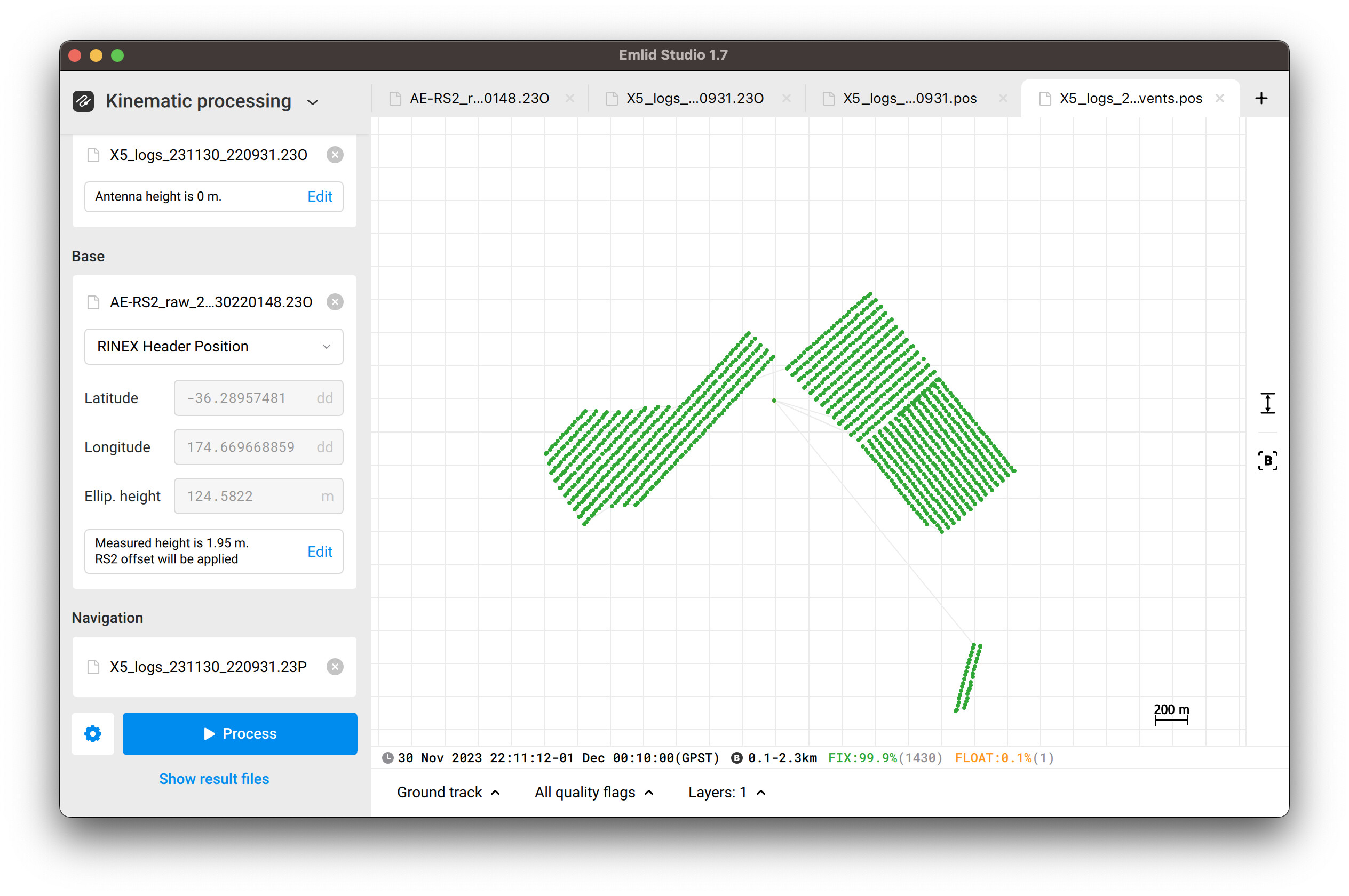
This dataset was processed smoothly on default settings of Emlid Studio and using navigation file from the base. For some reason, the plot shows the odd 06.01.1980 date and weird event with zero coordinates, but the events.pos file doesn’t have it.
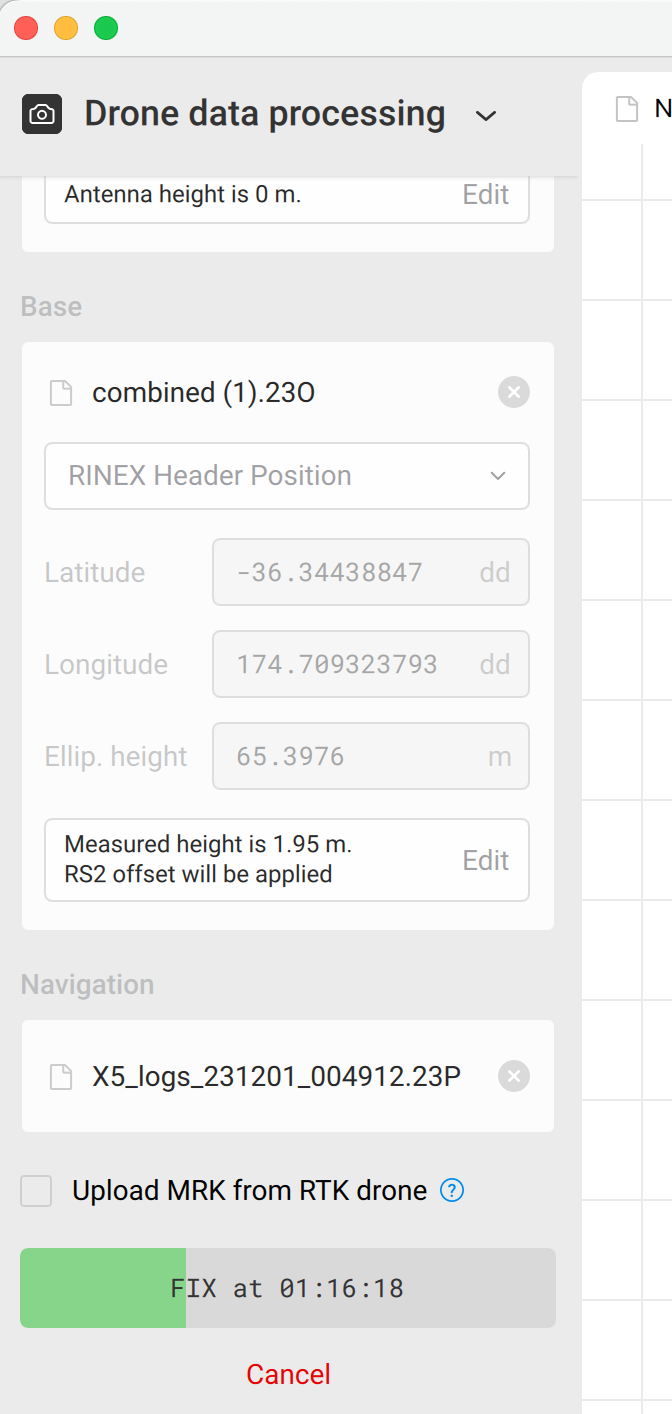
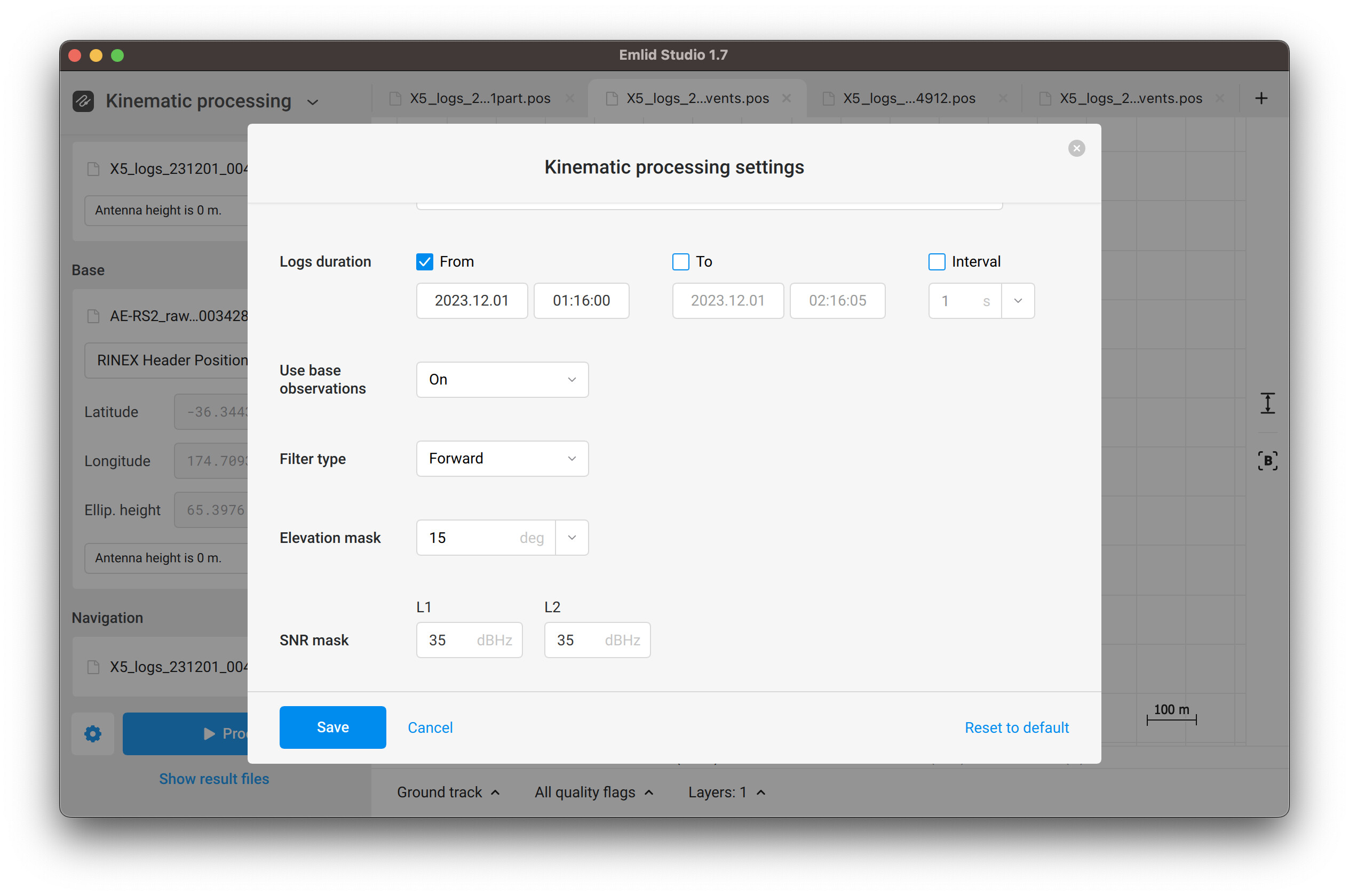
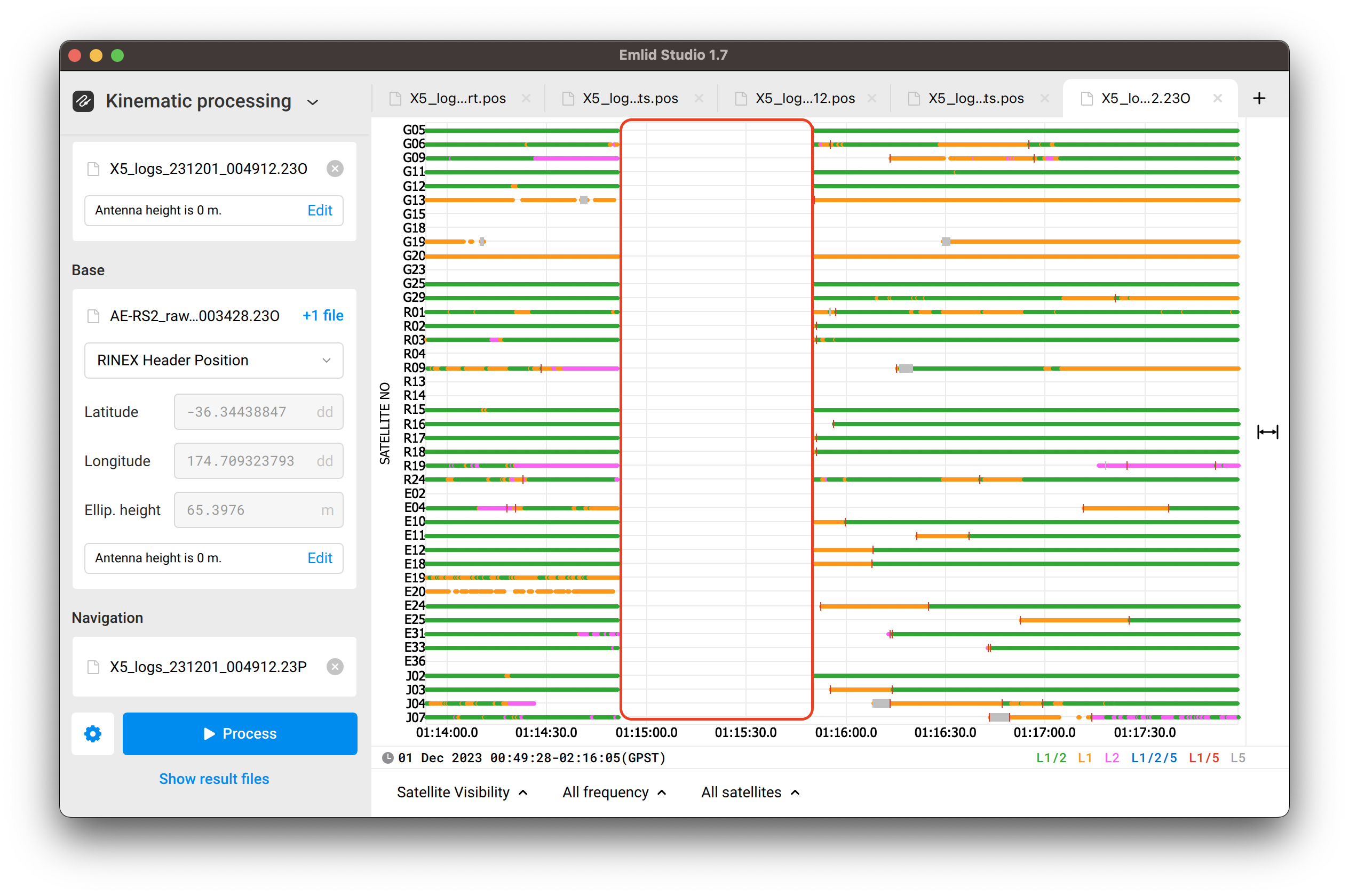
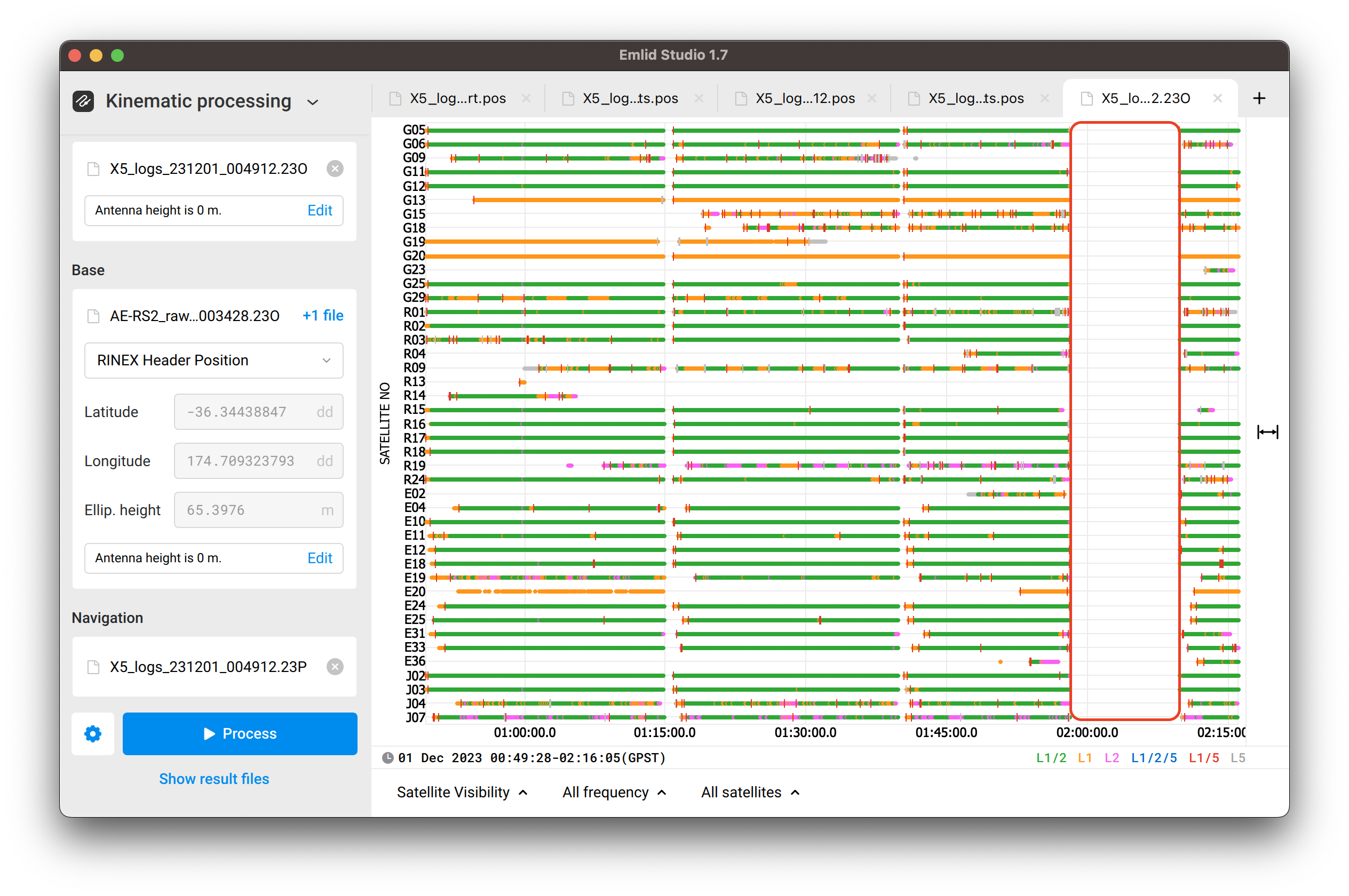
Emlid Studio stuck at the same moment, so I’ve decided to split the processing in two parts. The first lasts until 01:15:00, while the second starts at 01:16:00:
Thank you that’s very helpful again.
Apologies the TW Day 02 had the wrong reach logs in it so these are the right ones now:
I’ll give it a go myself.
For future projects, can we assume that if during Emlid processing it gets stuck at a certain point we are best to split the data then and exclude the gaps?
I will get in touch with Mettatec about potential issue with the X5 creating gaps and weird starting dates (1980).
Next question, (I’ve contacted Metatec as well), but I was wondering if you could help find these missed events and therefore photos I need to remove in order to geotag them in Emlid.
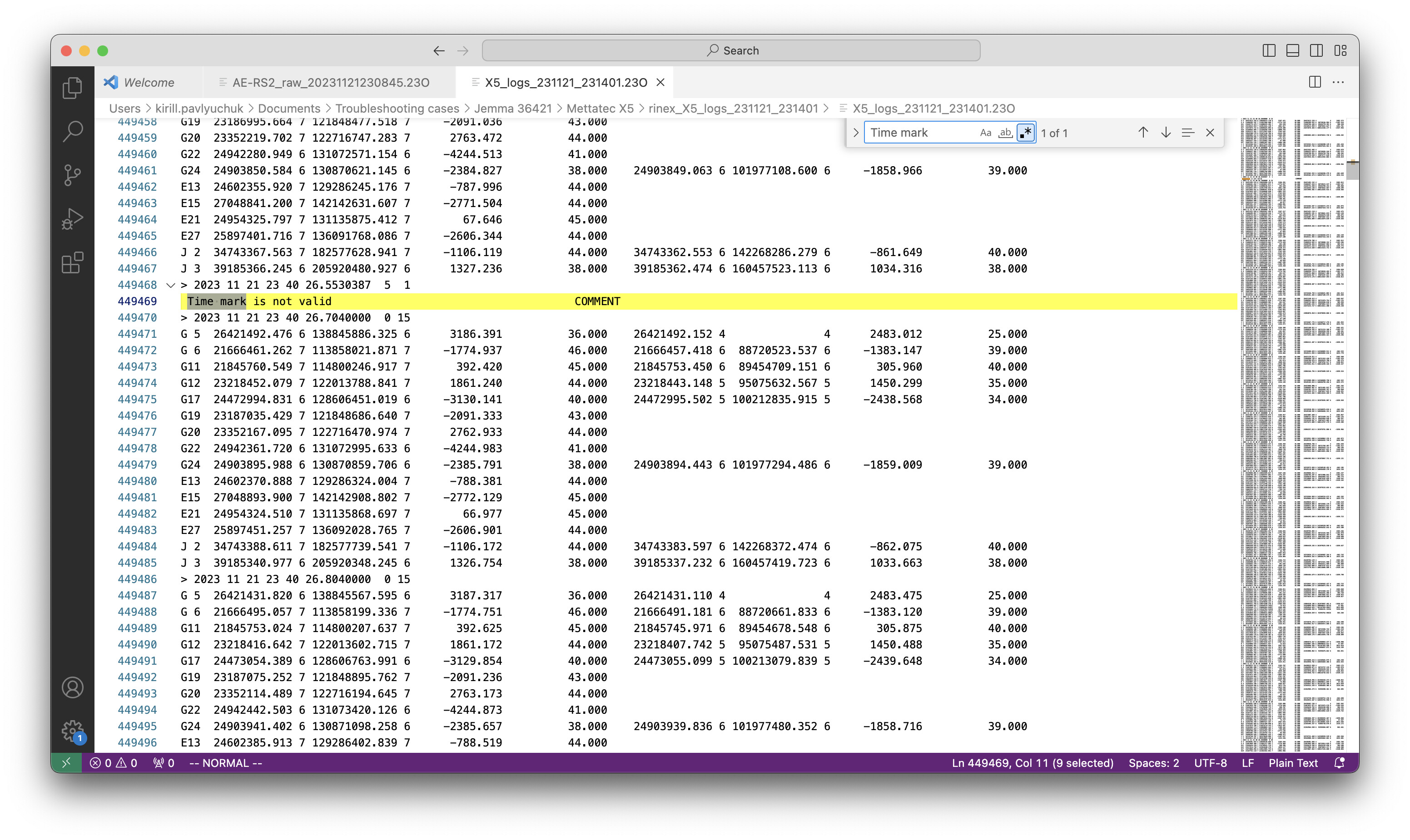
If you could also explain the workflow for finding missed events in Visual Studio Code then I would be able to do it myself in future if this issue keeps occurring.
This flight TW Day 02 requires 1,431 photos to geotag in Emlid however we have 1,450 so I am unsure which ones to remove in order to tag.
You just need to do string searching in the VS Code: Ctrl+F, input not valid or time mark. Just as shown on one of my screenshots above in this thread.
As for searching for photos to remove, this can be a really complicated task considering the large number of photos. Usually, you can see some gaps in the drone’s trajectory on the plot, which can indirectly indicate that there are missing events. But such gaps aren’t visible in your dataset, and you also have to compare the timestamps of the photos with the processed events to be as accurate as possible. So I’d still recommend you reconsidering the hardware setup to avoid such hard processes in your workflow.