



I have tried some of the modes, including hold-pos mode, and the drone keep changing its position in a wide radius, also its very affected by the low wind.
what can be the problem?
Without log to look at,…
Marc
Hello,
Log is speaking:
GPS is OK, Compass seems OK,
Flight modes are not configured…
| FLTMODE1 | 0 |
|---|---|
| FLTMODE2 | 0 |
| FLTMODE3 | 0 |
| FLTMODE4 | 0 |
| FLTMODE5 | 0 |
| FLTMODE6 | 0 |
You are always in stabilize mode…
Marc
I’m changing modes via mission planner, so I think I did try some other modes (pos-hold, etc…)
do you see any other optional failures? vibration ? barometer/gps instability ?
Ok, I saw the mode changes. It could be useful to use the RC transmitter to change your flight modes until everything is tuned.
Stabilize, Alt Hold and Loiter are to be tested and validated.
If you have large change of position in Loiter mode (with RC trim at neutral), redo a compass calibration.
Marc
Thank you for going over the log,
so you are saying that in loiter mode if all calibration are right, the drone should be still in the same attitude and location, even if slow wind come over.
beside that other parameters (vibration/barometer/gps accuracy) are just fine from the log?
Yes,
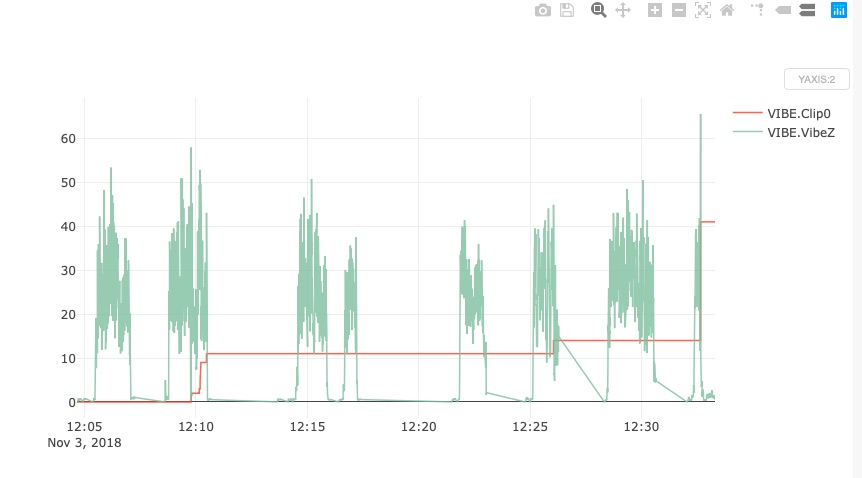
Your Z vibration level is quite high (clipping). X and Y are in the 10-20 range.
High Z vibration level can interfere on Altitude control.
Marc
Thanks, I also couldn’t see any battery info, why is that? Navio2 connected via emlid power module
Your battery settings:
BATT_MONITOR 4 BATT_VOLT_PIN 13 BATT_CURR_PIN 12 BATT_VOLT_MULT 12.020674705505371 BATT_AMP_PERVOLT 17.001018524169922 BATT_AMP_OFFSET 0 BATT_CAPACITY 3300 BATT_SERIAL_NUM -1 BATT2_MONITOR 0 BATT2_VOLT_PIN 2 BATT2_CURR_PIN 3 BATT2_VOLT_MULT 11.300000190734863 BATT2_AMP_PERVOL 17 BATT2_AMP_OFFSET 0 BATT2_CAPACITY 3300
Your configuration is bad…
Follow the wiki, https://docs.emlid.com/navio2/ardupilot/tips/#voltage-and-current-sensing
batt volt pin is 2
batt current pin is 3 (not 13 and 12)
Marc
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.