



we designed a drone by ourselves with navio2 and raspi 4B. we are trying to use ardupilot connect to GCS to let the drone take off, but after so many times test, it still cannot take off, could you please give me some advices why it cannot take off?


we designed a drone by ourselves with navio2 and raspi 4B. we are trying to use ardupilot connect to GCS to let the drone take off, but after so many times test, it still cannot take off, could you please give me some advices why it cannot take off?
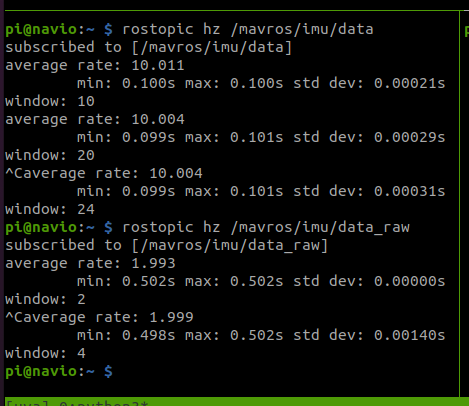
I find the drone is laggy, so I checked the imu data frequency, it seems like only have 10 Hz from calculated data, and from raw_data only has 2 Hz, please someone tell me is that normal? because I checked on the website, normally the IMU frequency should more than sevearl hundred
Hi Tao,
Welcome to our forum!
I’ve checked the video you shared and it looks to me that your drone’s legs are tied up to something. It seems like the drone is bouncing back when it tries to go further in any direction. Can you please elaborate on this?
To me it looks like the drone mass is improperly balanced and/or it is underpowered.
Hi Iiudmila,
because we dont have test enviorment, so I just use rope to tie the legs to ensure the drone will only in a certain space move and not fly far away or crash.
today, I make some more tests, there is the video, I incresed the parameters from pitch and roll, now it starts to wobble, because I tune the drone with QGC, this is the tune sliding block

Hi Tao,
Thanks for the details!
I’d recommend not tying up the legs because it still looks like it creates challenges for the drone and doesn’t allow it to move properly. I also agree with Gabriel, it seems like the weight balance isn’t centered.
Regarding the drone’s wobbling on the take-off, please check out these troubleshooting steps which most likely help to find the source of the issue.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.
