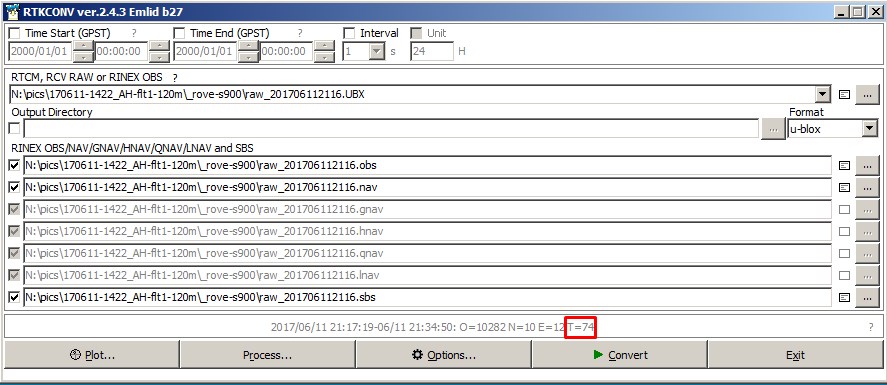
I am at a loss as to the issue. The only saving grace at the moment, is there is control placed and positions collected, and can still process with GCP’s yet would like to see this work as others have been doing. What I am perplexed by is the conversion show T=74, yet the processing via RTKPost is completing with 28 positions. What gives?
Thanks for the report. From the looks of it, this seems like an entirely different problem. As long as RTKCONV shows you the right number, the issue that started this thread should not be any more affecting you. Anyways, I’ll take a look at the logs and try to figure out what’s going on.
I’ve checked your logs and the main reason for missing time marks is really bad satellite view and, therefore, solution.
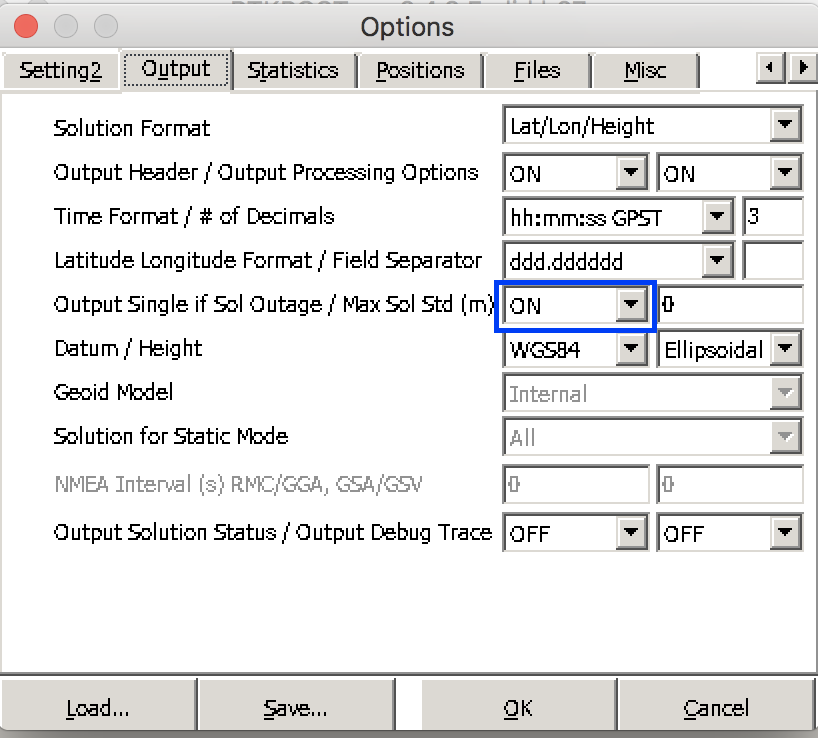
In fact, in certain parts of your log the solution is single. By default, RTKPOST will discard single points and the time marks will be missing. You can enable this in the settings:
Even without the missing time marks, the coordinates in single mode are not suitable for mapping.
I would recommend reworking Reach’s position on your drone, as there seems to be too much interference.
I would greatly appreciate to from any users who have successfully flown Reach on a multi-rotor setup and collected usable points. Specifically, what was done to isolate Reach from noise/interference/vibration?
What is your setup like? I had good results with a compact X8 carrying Canon S100s. On a newer machine I have had major Reach signal issues (regular GPS not noticeably affected). Finally traced it to the telemetry transmissions from an FRSky X8R receiver. Waiting to carry out a test flight with the X8R replaced with an X4R, the swap seemed to resolve the issue on the ground at least.
The setup is on a DJI S900 frame, using Pixhawk. Further analysis has determined the issue of slipping cycle count(s) occurs during changes to throttle inputs, which are constantly occurring on a multi-rotor to maintain heading and stable flight. So, it appears there may be some excessive noise from the S900 frame and power system, which has an effect on the Reach unit.
More configuration/mounting testing to be done to attempt to resolve the issue, or dump the S900 frame altogether and use a different hex frame.
I thought it was noisy motors/esc on mine as well, it was only when I went through the system isolating and testing the signal with each bit of electronics on board powered and unpowered that I saw the cause of the cycle slips in my case. The interference was very obvious when watching the Reachview status screen, signal strengths jumping up and down by 5-10 dB. Pulling the power to the X8R immediately gave consistent sat signal strengths.




 " height=“368”>
" height=“368”>