Looking into event38 integration, reach is not level in aircraft.

Reach is not level. Do you think it will be an issue ?
Looking into event38 integration, reach is not level in aircraft.
Reach is not level. Do you think it will be an issue ?
It would be great if antenna could be leveled, but in real life aircraft is constantly maneuvering and this 2-3deg misalignment is not important.
Thank you Igor, it could make me a headache because I learn that GPS needs to be level and now it changes.
So Where is the offset between camera and antenna ? It still in center of antenna, I think ?
Correct, it is center of the imaging sensor to the center of antenna. This distance is called lever arm, you should measure it in coordinate system of your aircraft and enter values in Pix4D/Photoscan. After initial alignment photogrammetry software is able to determine orientation parameters for each picture with great precision and after that it can compensate for the lever arm.
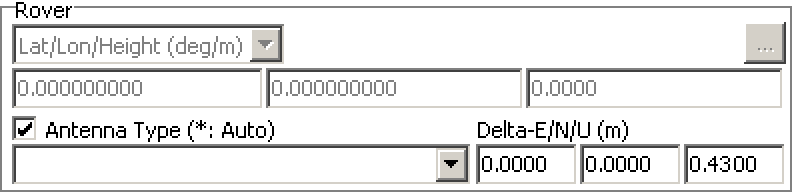
Where in Pix4D do you correct this then? I can’t find it. My camera is 43 cm below the Reach antenna, so I have a big lever arm, which needs to be corrected. I’ve been out of the PPK game for a while now, but back at it now and I need to find a solution for this. @igor.vereninov… can you shed some light on this? Additionally, in RTKPOST, under options -> positions -> rover antenna type, you can enter a delta-E/N/U. I presume the U stands for altitude? Do I need to enter 0.43 here?
Okay thanks… so what about this remarks of yours? I use Pix4D and can’t see this option…
I’m afraid I can’t help you with Pix4D, better ask for their support on this.
Remember that doing it this way is the brute force way. An aerial platform, multi rotor or plane, change attitude all the time, and that has to be accounted for. Look into if Pix4D can account for this automatically using imu data. If not, there are plenty of 3rd party solutions for this.