We fly DJI m300 with bad RTK accuracy and i try to get a fix in Emlid studio to correct that issue
Howere i only get signal FLOAT on all images. Please help pinpoint the issue
Base station location :58°11’46.10846"N 26°35’46.83810"E 145.3950m
I’ve tried to process the data in Emlid Studio, but couldn’t obtain a Fix solution. Aside from the data quality, I see 2 factors that could affect the results:
The baseline is 44 km, which is rather high
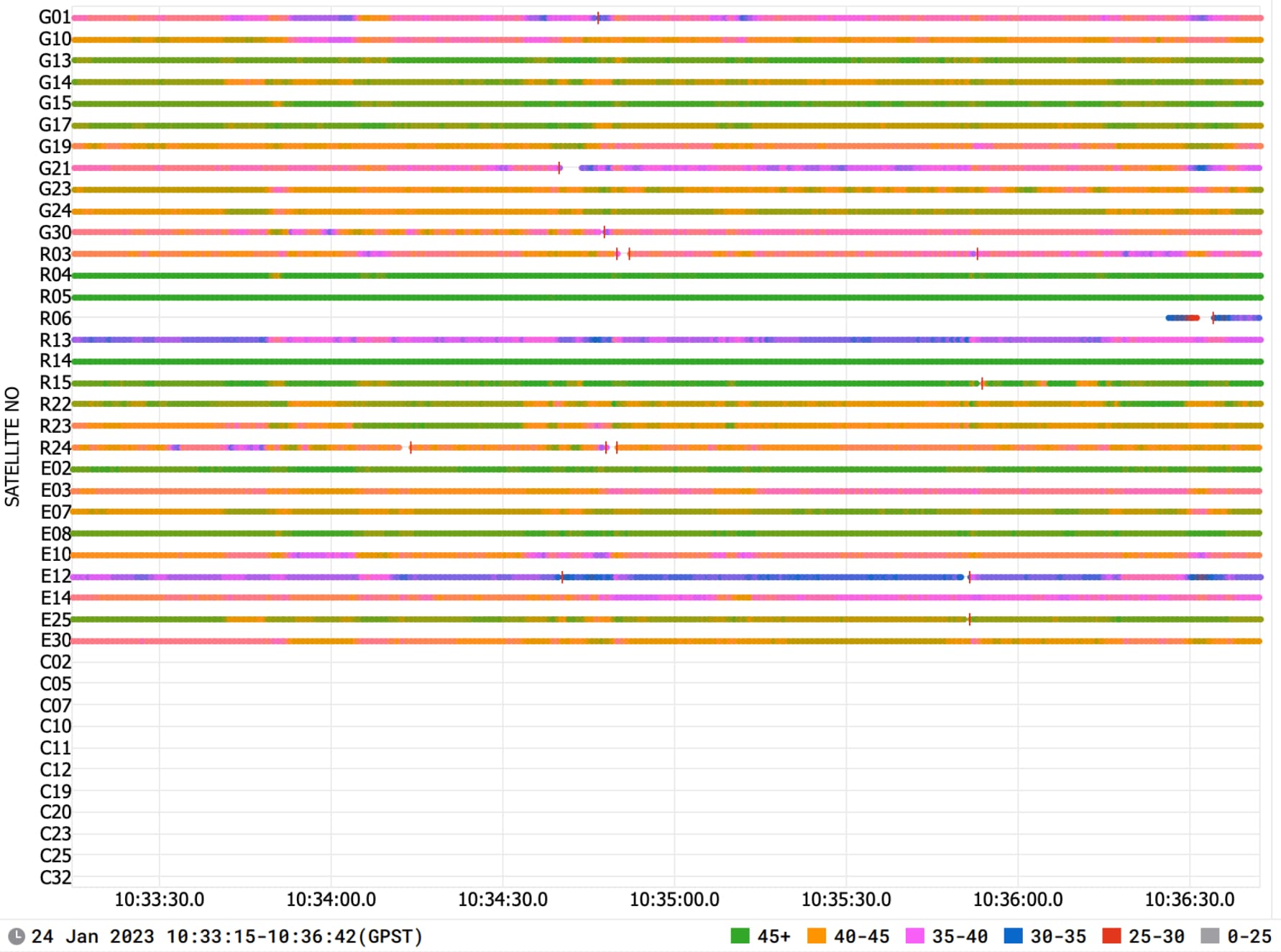
The rover’s log is only 3 minutes long. In PPK, a longer log can make a difference since the software has more data to use in the calculations.
Since there were also issues with accuracy in RTK, it looks like the reason lies in the setup. You can try the following:
Place the drone in an open area without RF interference
Try a base station located closer to your site. Alternatively, you can use a multi-band receiver, such as Reach RS2+, as a local base.