



Performing today v2.22.4 quality control I noticed the still unsolved problem of float freezing and, compared to v2.18.3, unacceptably TTFF (warm, normal Time to first fix), which should be less than 1 minute.
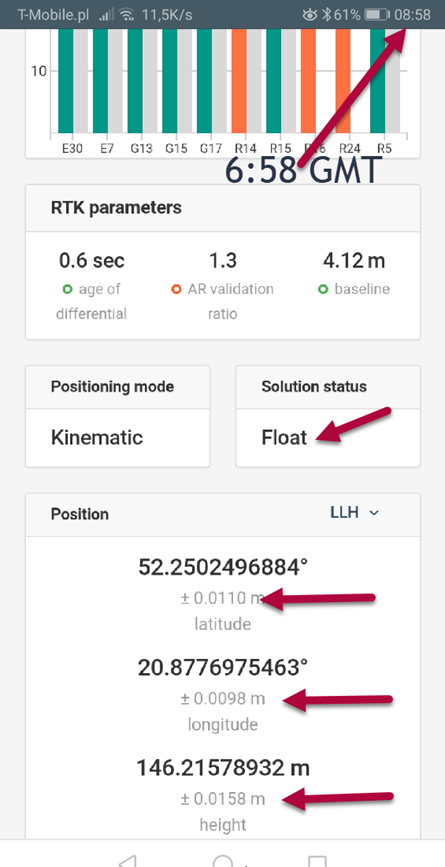
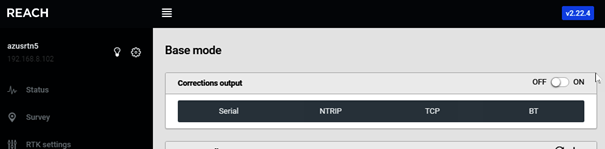
In the first postprocessing session I show the part in which after a short screening of the antenna by hand the Reach View remained as ‘float’, despite the fact that it looks like it should be ‘fix’. This can be seen in the screenshot reproduced. This forced me to ‘Reboot’ which resulted in a separate session.

In this session, in turn, with a short TTSF (Hot Time to Subsequent fix) there was a long unacceptable period of re-initialization (15 min.).

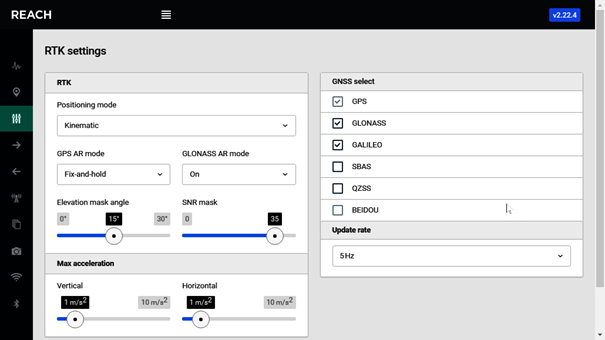
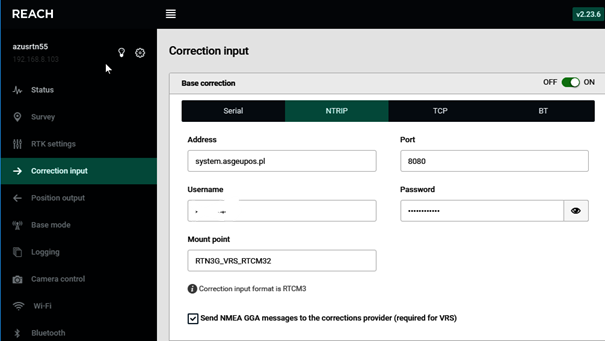
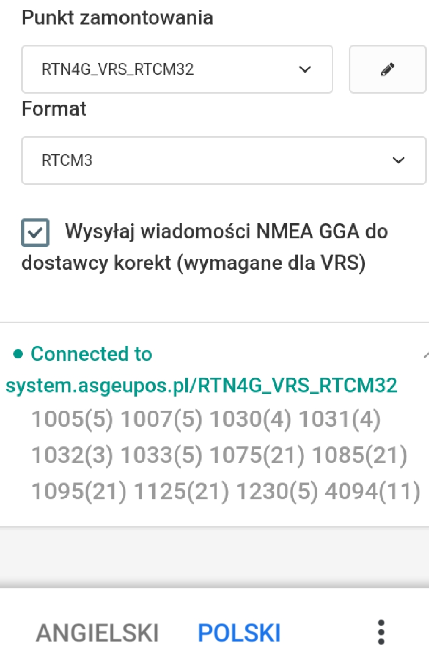
These two sessions I made by RTN with the following settings without moving the receiver.
Full documentation is available for download attached.
The results are presented graphically from postprocessing (of course option forward only), performed by RTKPOST-QT ver. 2.4.3 Emlid b33 recommended by EMLID. I wrote about my doubts before, whether it is a good choice to use the unstable version - the author T.Takasu warns that this is a development version. The 2.4.2 pXX is the stable version with the newest patches. The 2.4.3 bXX is the development or beta version with experimental implementations.
With the improvements, of the following versions you can see that the RTN method makes more trouble in Reach View, while simpler algorithmically RTK method much less.
Until now, the lack of results of this discussion.
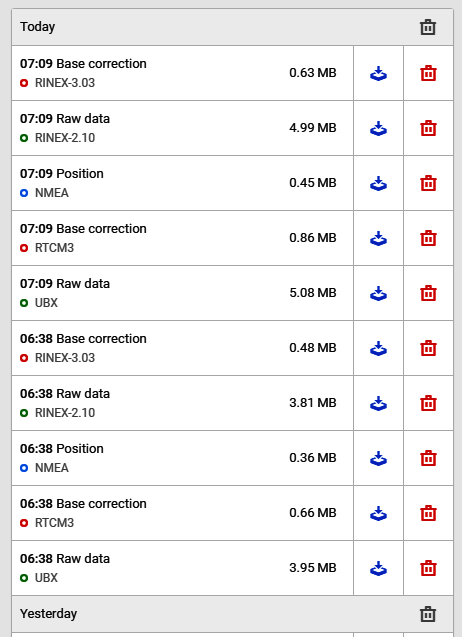
The quality of RINEX obs files was checked by CSRS (reports attached).
raw_202004250638.obs GPS & GLONASS NRCan Ultra-rapid
raw_202004250709.obs GPS & GLONASS NRCan Ultra-rapid
Warning: No antenna type RINEX header record was found. Phase Centre Offsets and Variation could not be applied. Estimated height should be used with caution.
Warning: Although the RINEX header indicates dual-frequency data, only single-frequency data is present. File is processed in single-frequency.
base_202004250638.obs Error : The next time tag is not where expected at epoch 2020 4 25 6 44 0.00.
base_202004250709.obs GPS & GLONASS NRCan Ultra-rapid
Warning : Although an antenna record was located in the RINEX file, no phase centre information could be found in the IGS/NGS file for your antenna. Estimated height should be used with caution. Ensure that both the antenna type and the RINEX header record "ANT # / TYPE " are valid.