dicky
April 16, 2017, 10:54pm
1
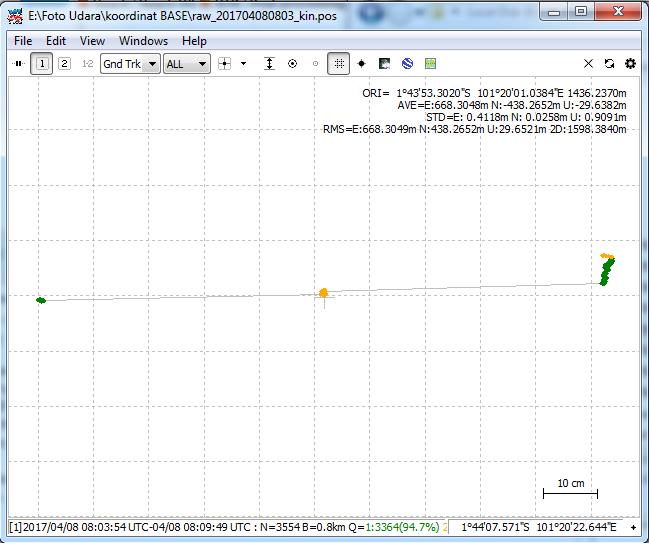
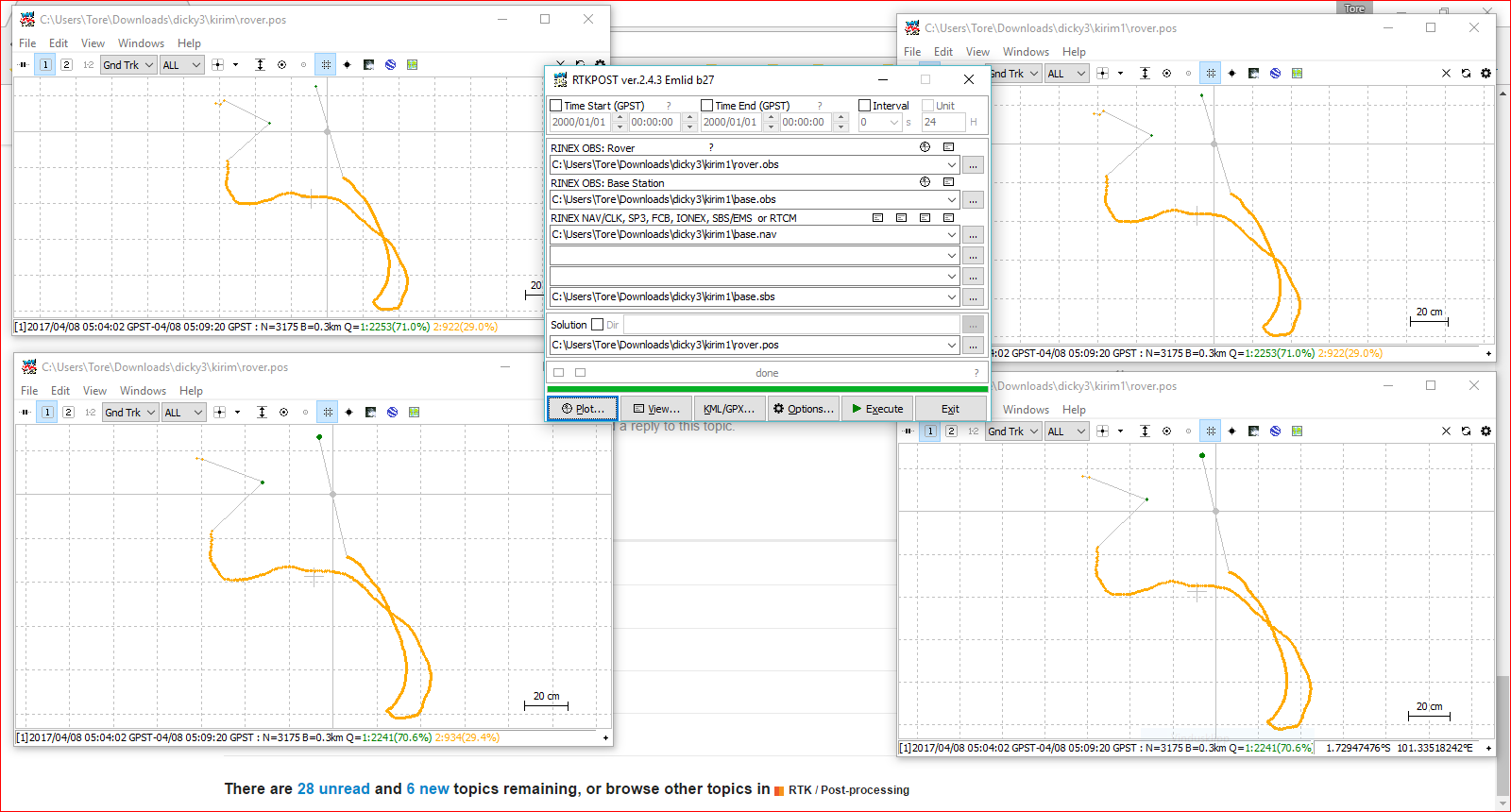
I post processed my rover with different positioning mode, and got different result. This is the picture
And this is the base and rover file
https://drive.google.com/file/d/0B4NFPYGvPmMvOTF3c2szSGlpZ0k/view?usp=sharing
And one more the, which one is the true result??
This is the file https://drive.google.com/file/d/0B4NFPYGvPmMvZWRqd0hUc2pTdTA/view?usp=sharing
It’s strange… Is it a bug??
TB_RTK
April 17, 2017, 6:11am
2
I got the same on both. Even the same result when changing kinematic and static
alujoe
April 17, 2017, 8:01am
3
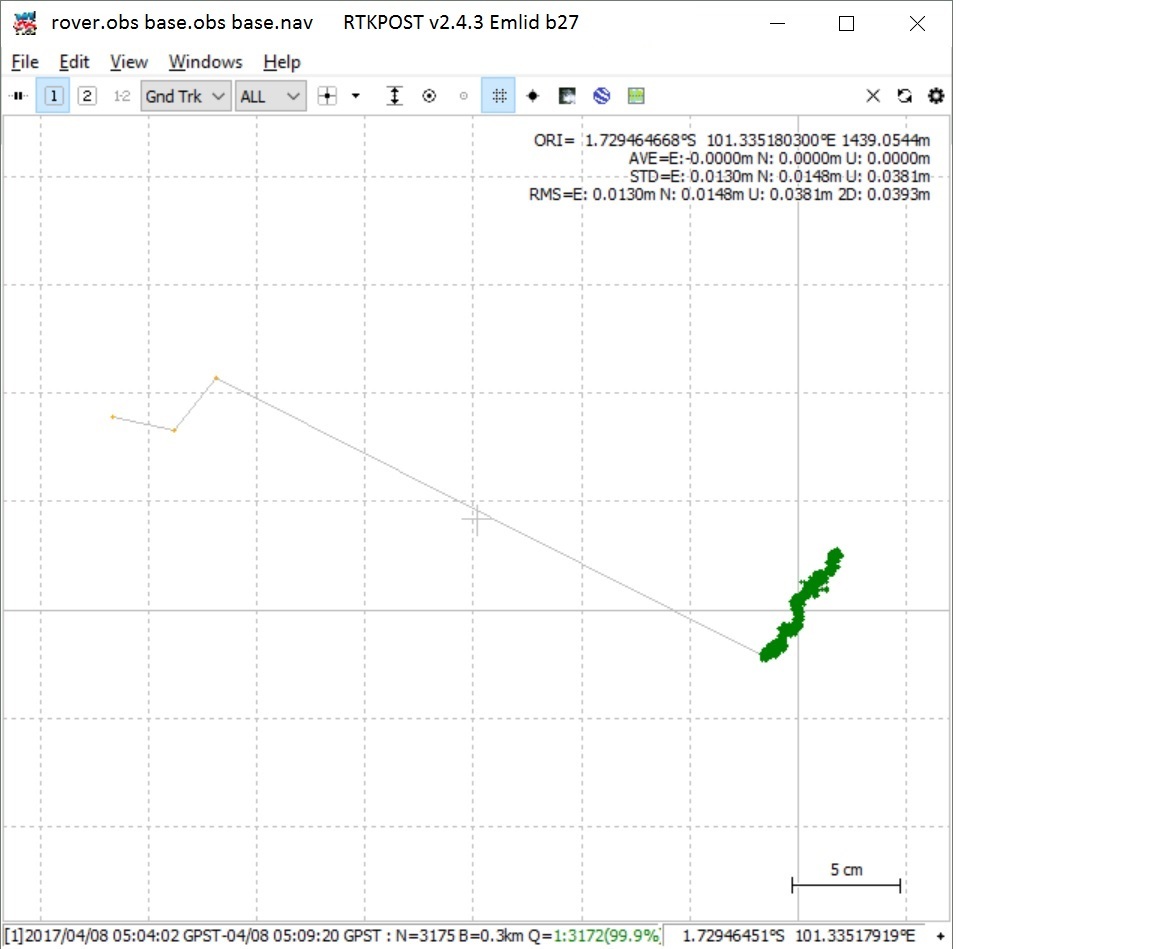
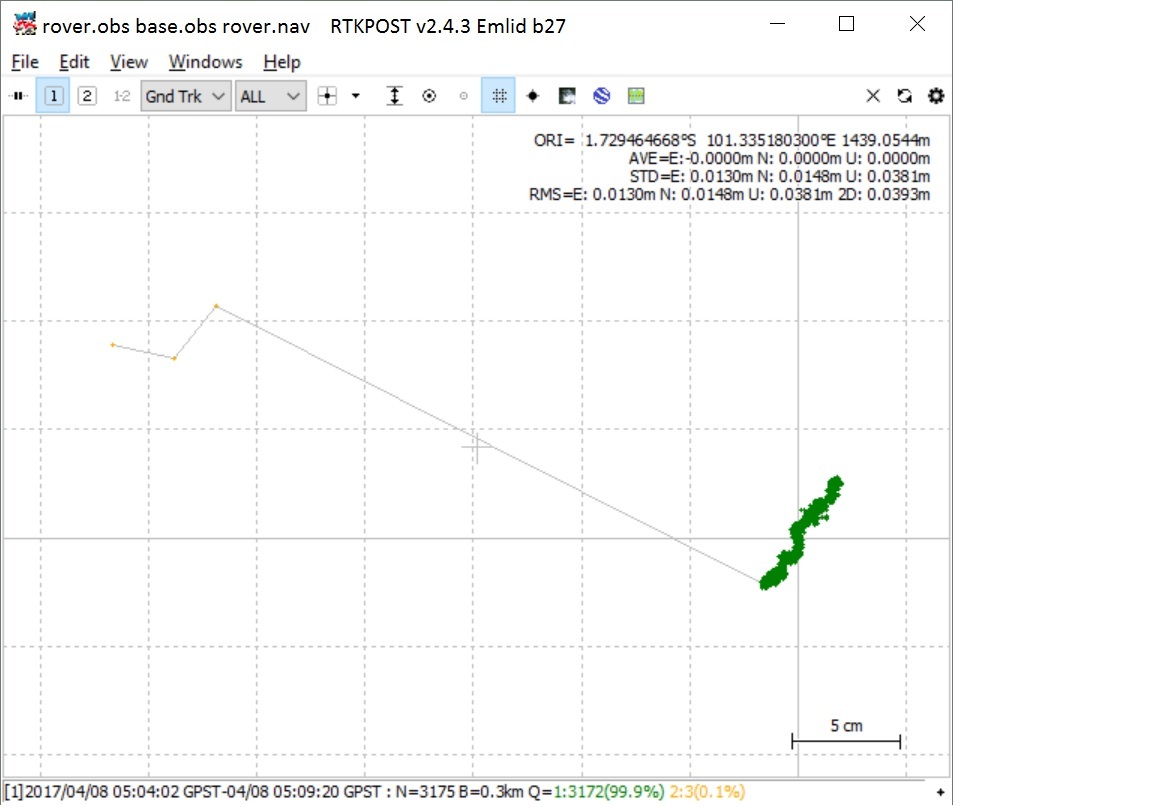
More alternatives using RTKPOST v2.4.3 Emlid b27
Positioning mode kinematic using rover.obs, base.obs and rover.nav
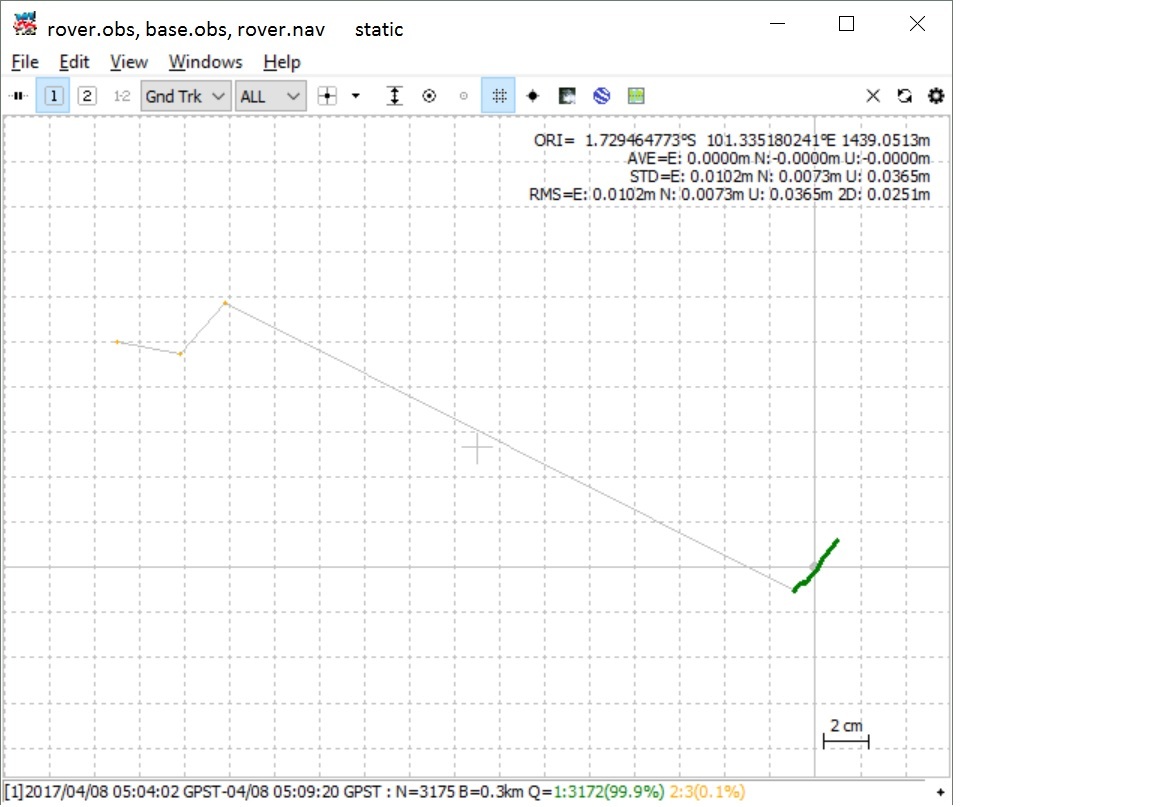
Positioning mode static using rover.obs, base.obs and rover.nav
TB_RTK
April 17, 2017, 8:44am
4
Oh, forgot. i run 2.4.3 b26
TB_RTK
April 17, 2017, 10:05am
5
I think your config.is messed up or bad/wrong configuration. Delete it and try again
1 Like
alujoe
April 17, 2017, 6:17pm
6
Hi TB_RTK,
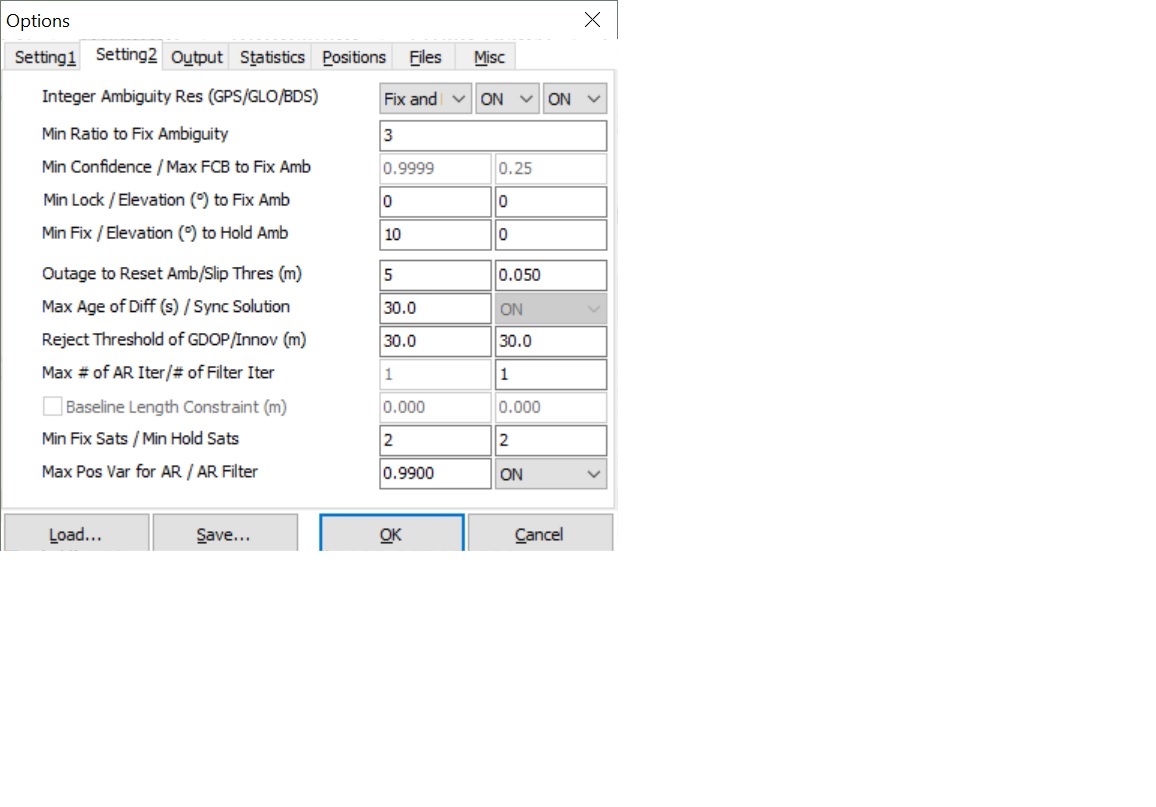
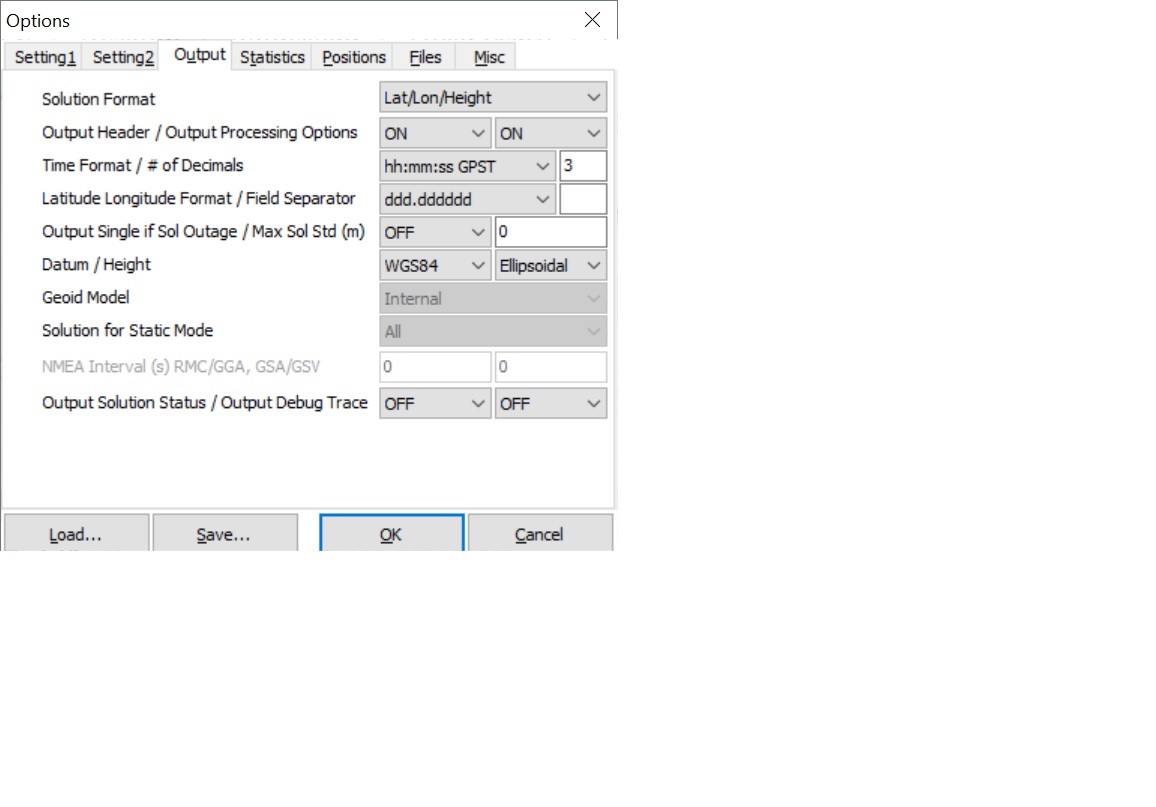
I use these settings, don’t know what is wrong ? Any suggestions ?
TB_RTK
April 17, 2017, 7:14pm
7
Load this config and adjust to this imageR1.zip (14.2 KB)
dicky
April 18, 2017, 1:10am
8
Thank you @TB_RTK and @alujoe , I will try rtklib from emlid. Where to download it?
dicky
April 18, 2017, 4:21pm
10
Thank you @TB_RTK , I will try it.