I typically perform surveys with RTK link to a nearby CORS station. But I may have some situations in the future (multiple units but limited logins) where I need to rely on PPK. I’m also fairly new to the Reach units/Emlid Studio software but I’ve been through all the materials/docs/videos.
I was doing a few tests to compare the two methods and make sure I had a suitable workflow but I am having some trouble interpreting the results.
Here is what I did:
Connect to the CORS station, wait for a fixed signal, and survey a nearby manhole cover averaging over a 3- minute time period. When collecting that point, I also recorded the full position log (LLH) and the raw RINEX.
I stayed in the same position but turned off the NTRIP corrections. Recorded the position log and raw RINEX with the ‘single’ signal
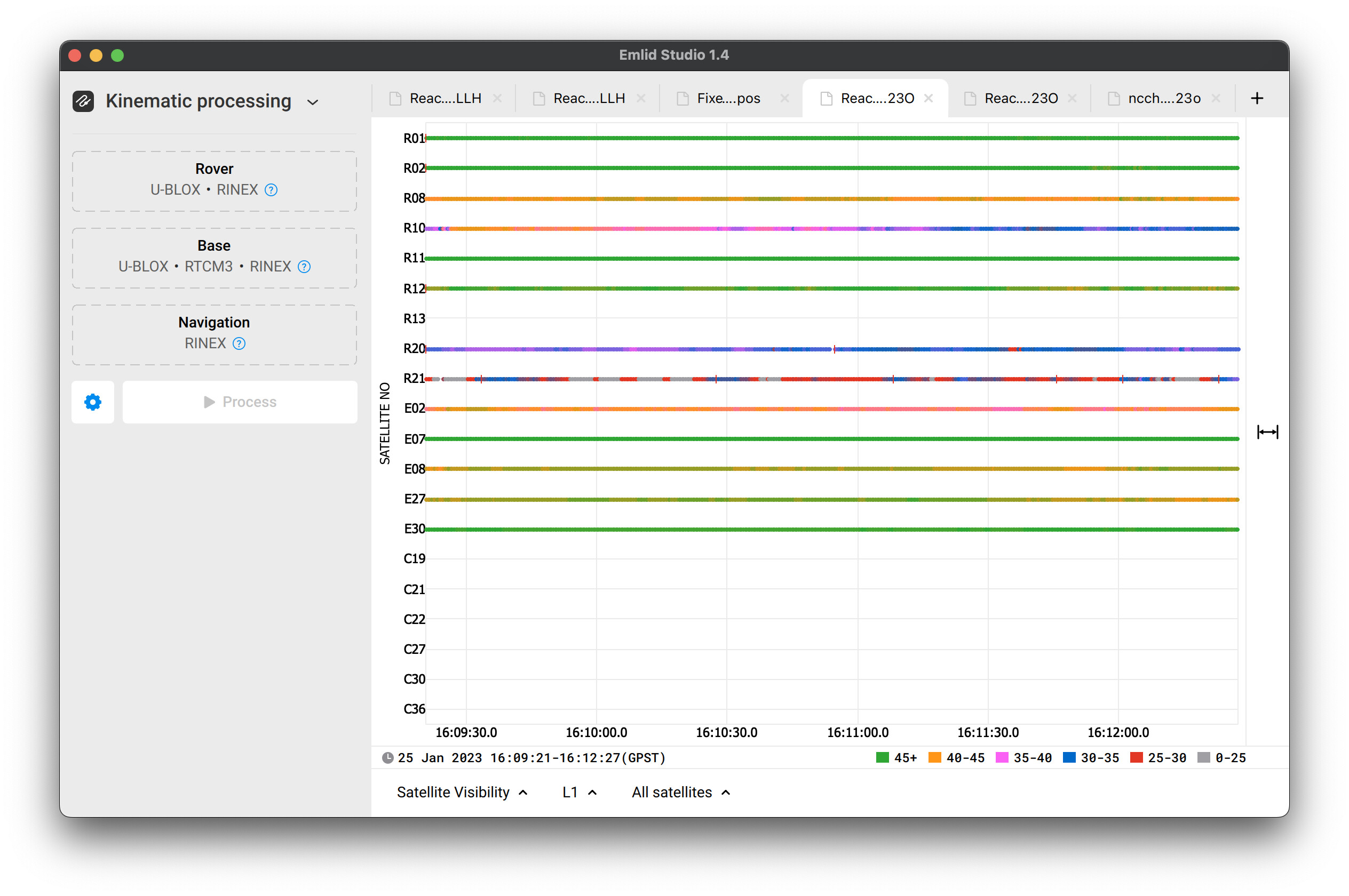
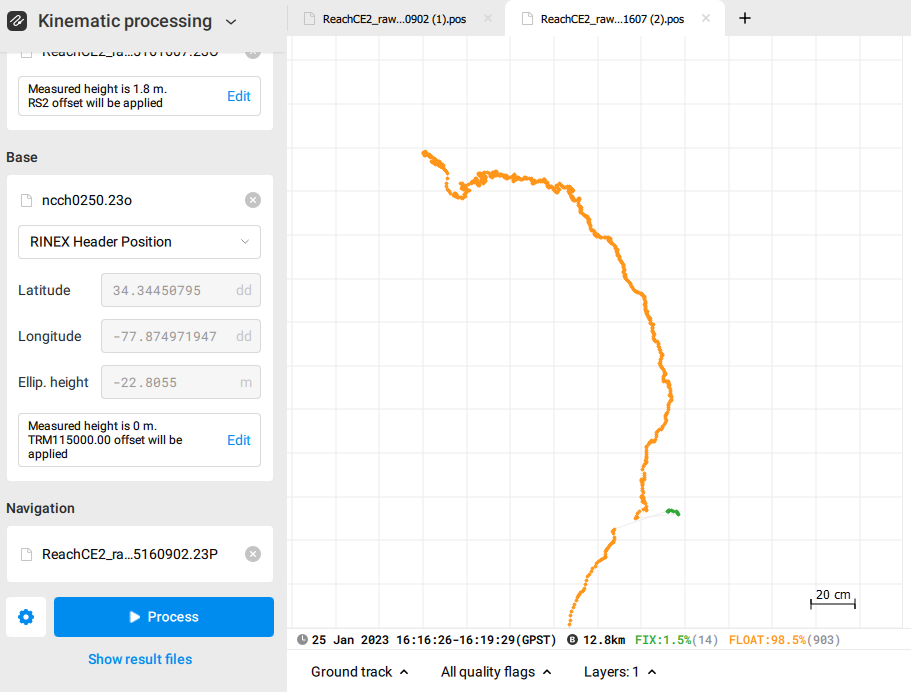
Uploaded my non-RTK observation file to Emlid Studio as the rover, my nearby CORS station observation file as the base, and a navigation file (trying both the one from the CORS and from my rover) to get a corrected solution.
I tried doing the PPK in static and kinematic mode. I realize this was sitting at a fixed point but when I am out surveying, it is often with a unit in a backpack and I wanted to see the result from both methods.
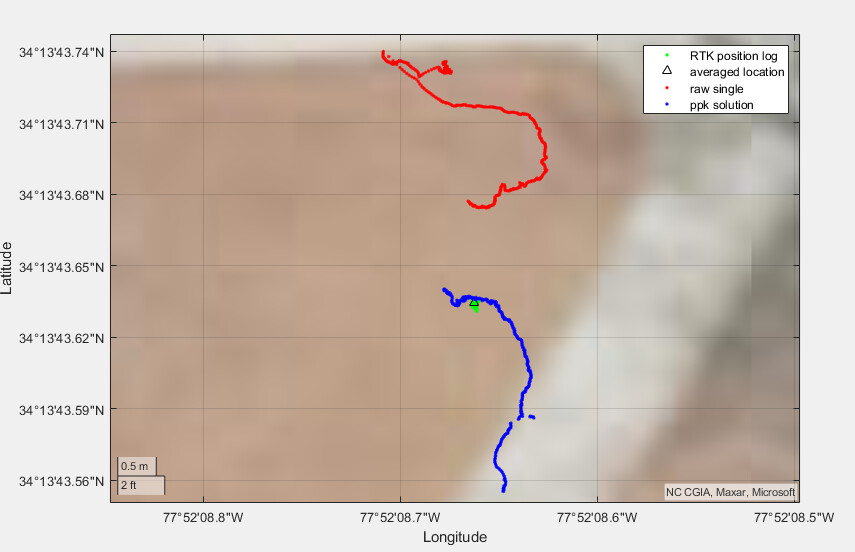
The PPK corrections do not result in a fixed solution and they just shift the data rather than increasing the precision of the individual observations. This may be too short of a time series (3-minutes) but I am interested in understanding why the RTK points have good precision for the 3 minutes but the PPK cannot achieve that. My understanding is they are essentially being corrected by the same base time series just not in real-time. I’m hoping someone can help me understand what might cause these differences.
Thanks in advance!