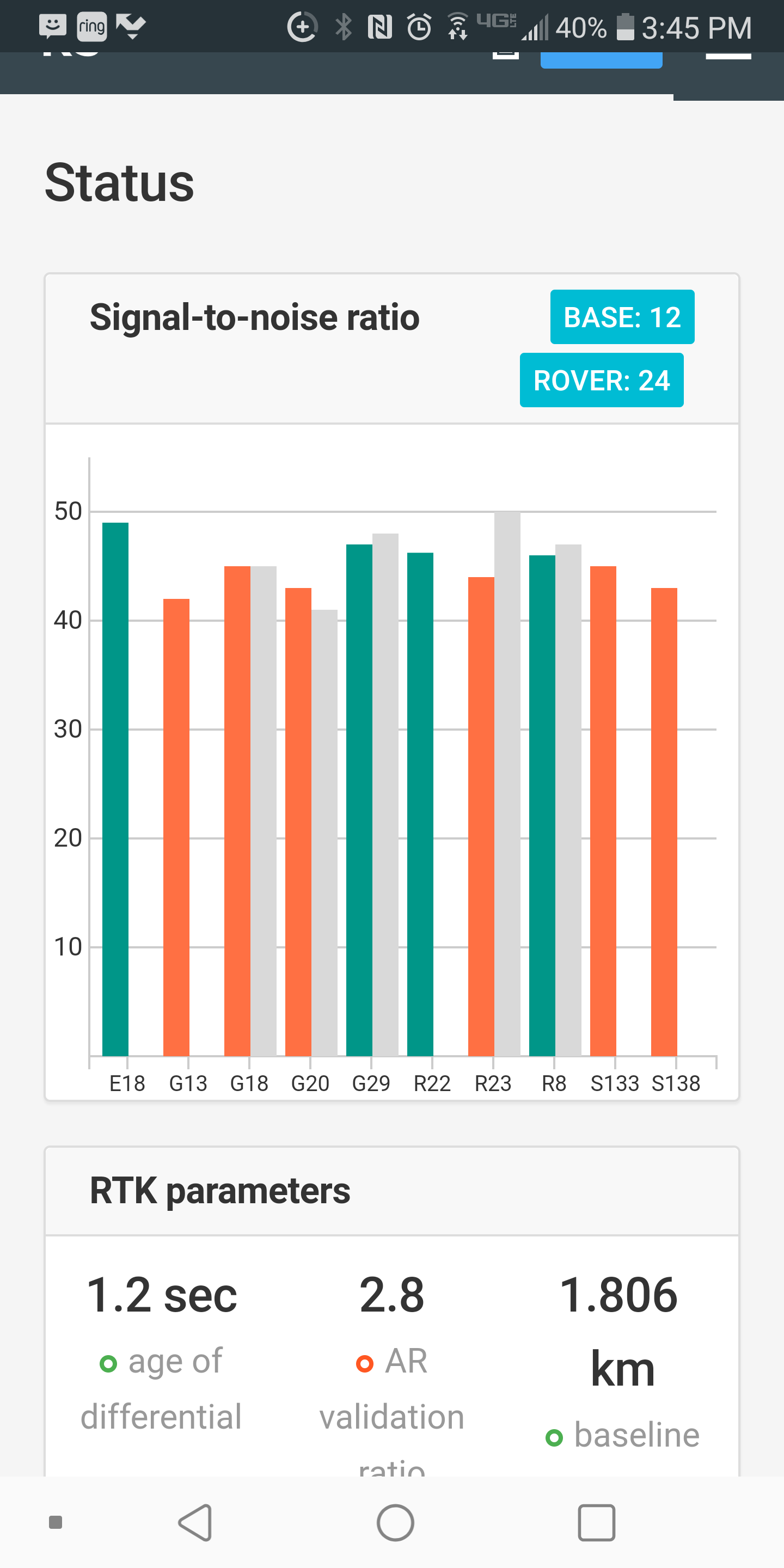
I’m testing the Reach RS+ with my state’s reference network of NTRIP Casters. Tried it for the first time today. The base caster was 1.8 km away and was picking up 11-12 Satellites. My Reach RS+ was picking up 24. I used all default settings. After about 2 minutes I momentarily got a FIX for about 15 seconds. I tested again an hour later and after 15 minutes, never got a FIX. Should I change any of the settings from their defaults considering I’m not using another close Reach as a base but using NTRIP? Do I need to find out what satellites each potential caster I’m going to connect to is using to determine best settings separately for each caster?
My other question is, if I only need the coordinates to be within .05 m accuracy (I’m okay with 0.1 m height accuracy), how do I determine the collection time for the FLOAT? It seems the longer you wait, the RMS error increases and then gradually slows down. But the setting for automatic collection is the RMS error not the RATE OF CHANGE of the RMS error. It seems to me on the automatic collection settings, the collection time is very arbitrary – a complete guess for the time it will take to get a confident reading within the max RMS error? Or do people just assume 5 minutes (the default) is plenty, and if it doesn’t go over the RMS error in 5 minutes on FLOAT, you’re good? I’d like to spend a half hour measuring 10 points rather than an hour if possible, so is a better method to forego the automatic collecton, and just collect data while watching for the RMS to plateau within your error tolerance?
Also, if my RMS Error Setting is 0.05 m do I really need more than a couple seconds of collection on FIX?!
I am using a RS2/M2 via the Ohio CORS network. I only enable GPS & GLONASS on both as that is what the correction stream that I am using utilizes. I tried having all enabled but it went to Float quick but after a few minutes hadn’t changed to fixed. After disabling those that the network were not using, both the RS2 and M2 go fixed in less than a minute.
I know with other manufacturers GPS receivers, if it didn’t have GLONASS enabled and you connected to a stream that had it, the same issue would arrise. Ohio offers with GLONASS and without.
Well I disabled all but GPS and Glonass and not sure if that was it, but I got a solid Fix in about 1-2 minutes. So maybe that did the trick as I would guess the RTK corrections would be based off of the satellites the base and the rover are reading and just ignore the other satellites, but maybe not? Still wondering about FLOAT collection in case I’m in an area I can’t get a FIX. At this point, I’m just going to assume for FLOAT I need to collect for at least 1 minute and then keep collecting until the change in the error plateaus and if necessary, starts coming down to be within my tolerance.
May I ask you to update your Reach RS+ device to the latest stable version (v2.22.5) we’ve just released and check if it helps? We’ve improved RTK stability in this firmware version.
Also, it’d be nice if you share with us the raw data, position, and base correction logs from the rover so that I can look into them and share my thoughts on it.
As for the Float solution, I’d like to point out that it might not provide the sub-meter accuracy. The accuracy of the Float solution highly depends on environmental conditions. If the sky view is obstructed badly, you can get a few-meters accuracy even.