Is there any open source programme/service can be used (instead of RTKLIB) for post processing Emlid Reach data?
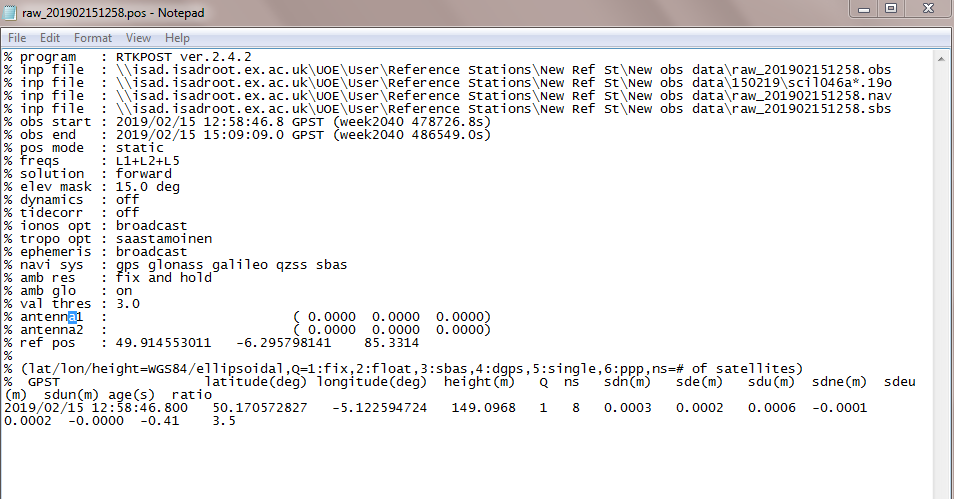
I was trying to use RTKLIB for post processing my data, but it does not give me a suitable processing (I am not sure whether you have the same issue or not with RTKLIB). For example when I processed the data, and click at view on RTKLIB Pos: the sde, sdn, sdu, sdun, etc are between 0.00 to 0.0002m. However, when I click at plot: the sd is 0.000 (it is error free!). So, this result is not make sense to me as I do not think the accuracy is 0.2 mm nor 0.000.
I will be so grateful if anyone could help.
After reading the document Introduction | RTK Modules I Just want to check the setting for creating known point with you, if you noticed anything wrong in the setting please let me know:
RTK Setting: all GNSS satellites are selected (GPS, VLONASS, GALILEO, SBAS, QZSS)?
Position mode: Static?
-GPS AR mode: Continuous?
-CLONASS AR mode:Off?
-Update rate: 5HZ?
-Correction output: Off?
Position output: Off?
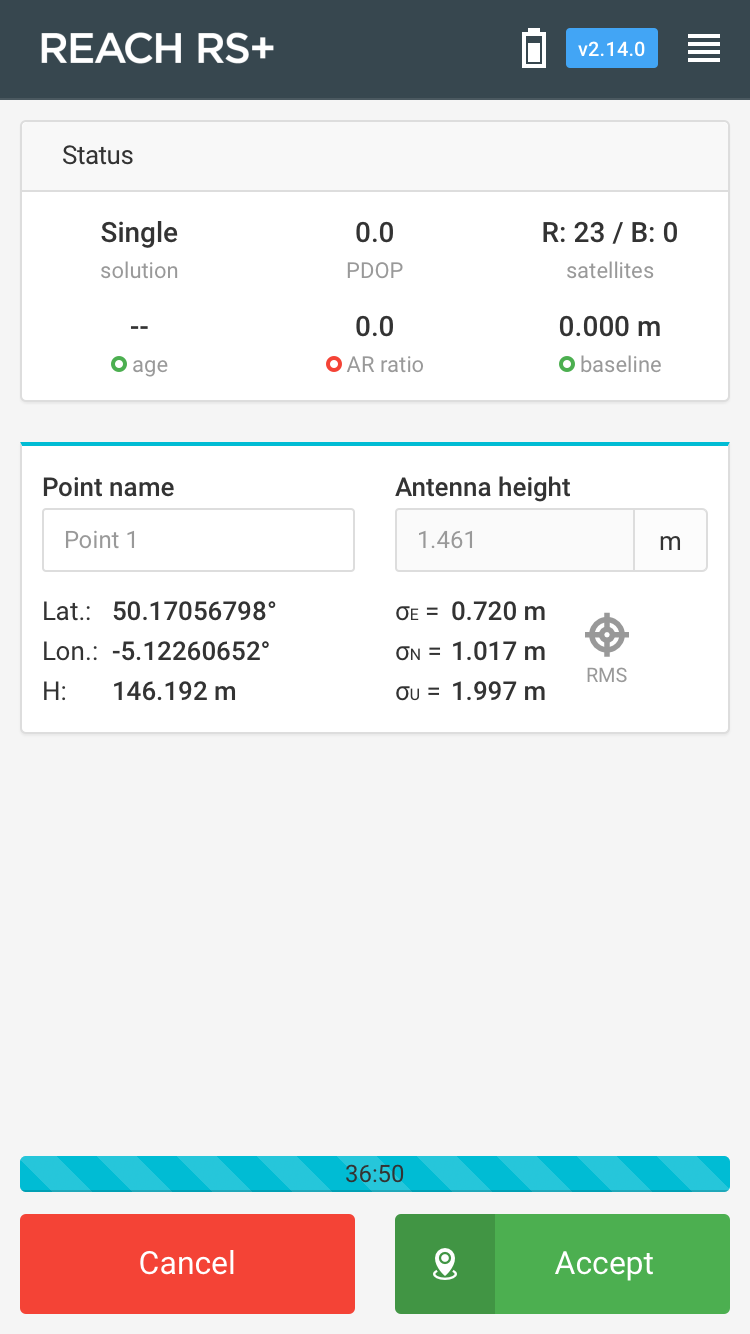
When I was conducting the measurements, the RMS was high, as shown below. Also, AR ratio and PDOP are zero, is this normal?
@wizprod I do not have a base station in my area, but there are reference stations close to my area (~10-14 km) available online, I can download them for post processing with RTKLIB.
This is why I am creating known point, so I can measure other points with relative to the base station that will be created here.
The settings I sent above for creating Known point are correct?
Thanks so much @wizprod
Ok, so you mean that I do not need to check the setting before starting creating GCP, do not you**?** What about Correction output and Position output: both of them off**?**
Although I read Emlid Reach document, but I need to check some points with someone who used this module before, so many thanks Christian for answering.
The right answer is “that depends”. If you don’t care about RTK, and is all about post-processing, then the answer is that only update rate matters (would set it to 1hz, as you are static when doing GCP anyhow).
Again, if you only intent to do post-processing, then they don’t matter at all. You can run a survey using just your rover, and the base setup at the same time (or use NTRIP), but they don’t have to communicate, if you don’t require RTK, but “only” PPK.
I will use RTK method after creating GCP in the area.
It seems everything is fine with my setting for creating GCP except the Update rate should be 1 HZ. So, this is ‘maybe’ why I have not received fixed solution. Anyway, I will do the measurement again tomorrow to set it to 1HZ.
Yeh, I am using rover only; then I will use four reference stations (available online) in RTKLIB for post processing my rover data.
In the screenshot I sent earlier, both AR ratio(ambiguity resolution) and PDOP are zero, is that what supposed to be? And RMS after ~30 min of measurement is ~ 1 meter, does this still have the potential to provide cm accuracy after post processing?
Yeh I understand I have not used base station, but I will use it in RTKLIB. I mean is this still a correct way for for getting cm accuracy after post processing?
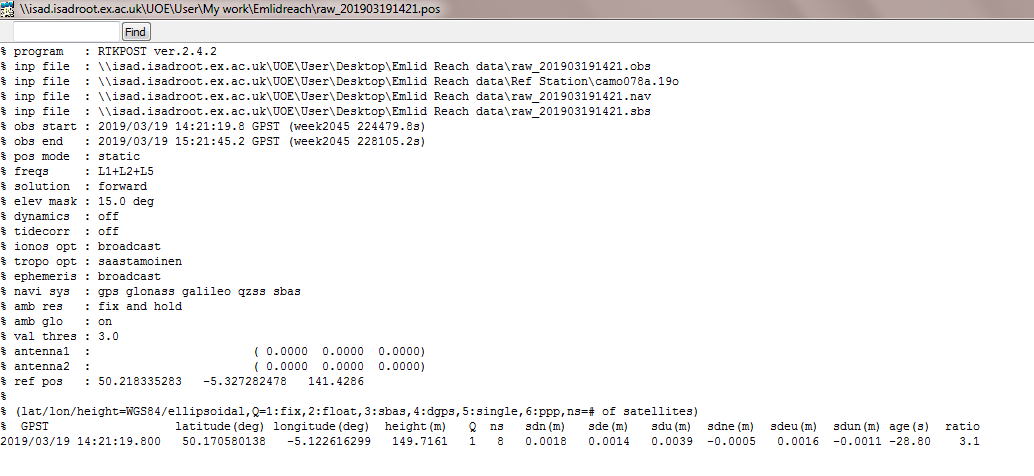
Just to check with you, I post processed my data by RTKLIB (Create known point) and I got this result, from your experience, do you think the accuracy (1-3 mm) I got is acceptable?
I am asking this question because I used Leica GNSS before and I got 1-2 cm accuracy for the base station
*I used only one reference station (downloaded online from OS),
For a 120 meter baseline, that’s as it should be.
One thing: if you plan on using this new point for your base, I would download Precise Orbits and Clocks for your processing. that’s will get it even more precise (in the absolute position).
But if you have that CORS station 120 meters away, why bother setting your own point?