



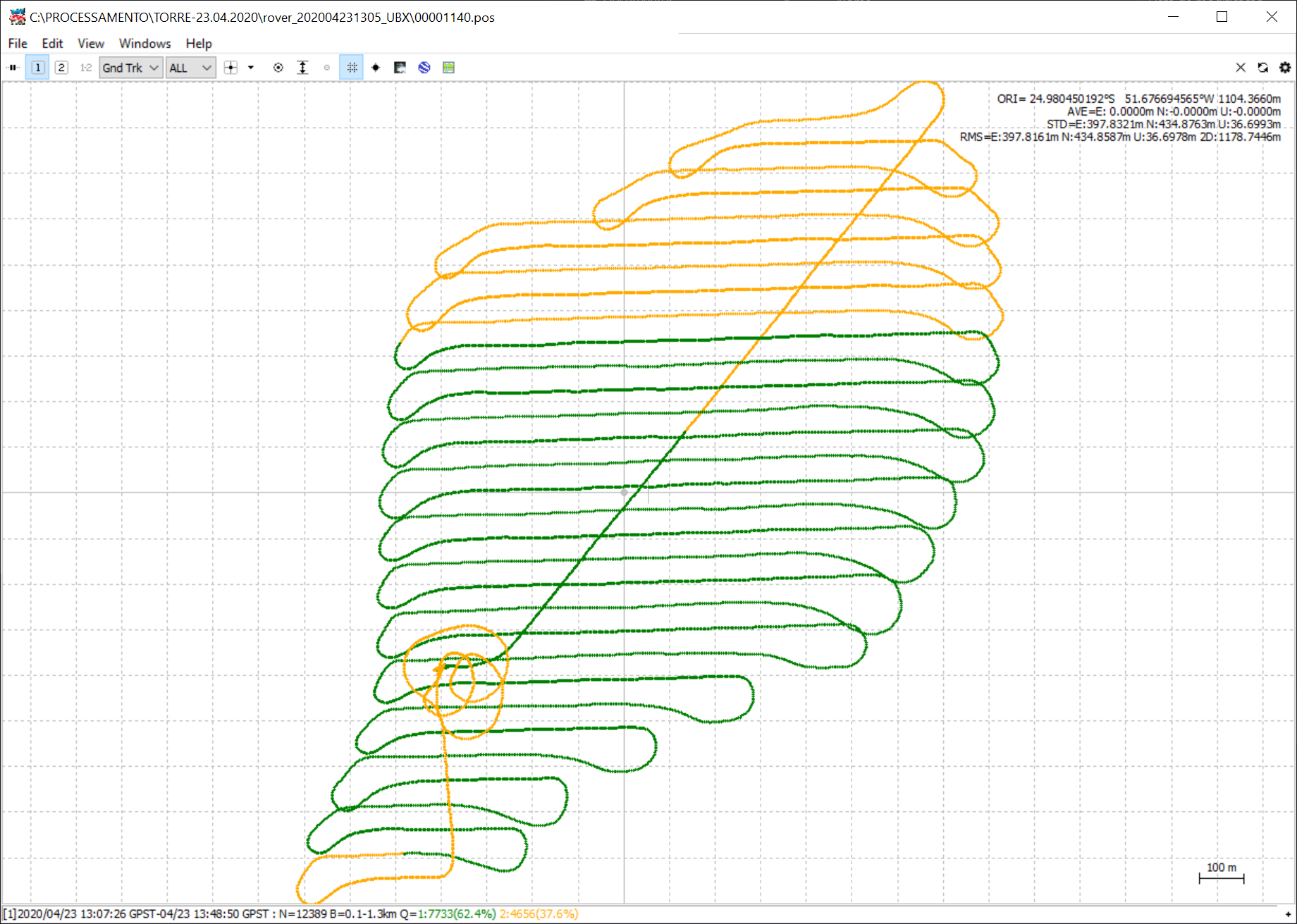
I have a serious cycle breakdown problem, I am using an emlid m +, Pcb ground plane with 90mm emlid powered by a bec castle shared with a rfd900 radio and time marc on camera , reach m + module mounted below the ground plane, now replaces the ground to a 10cm and 3mm aluminum plate and I also put the module out of the fuselage, tomorrow I will carry out the tests. any more suggestion? I was never able to use the system for that problem
postprocessing on rtklib 2.4.3 b28 by emlid
esc castle 50a 8s
motor tmotor 8s
batery 8s





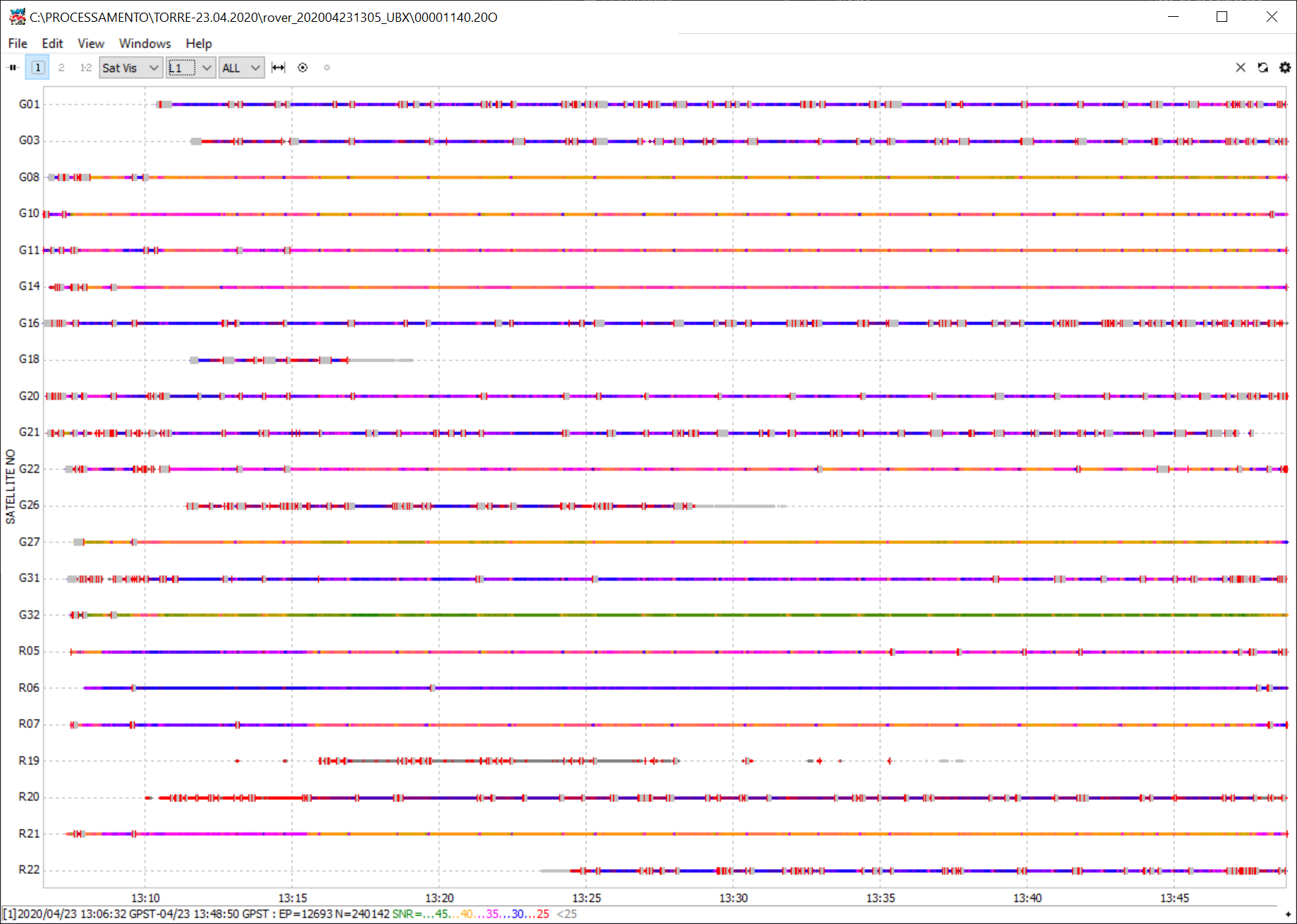
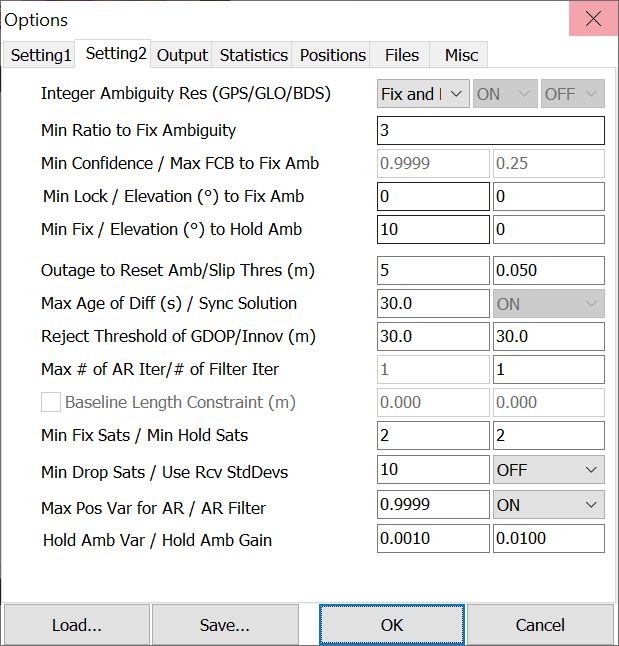
I would try removing GLONASS from processing. Then tweak your mask.
what mask value do you suggest?
My default is usually 15-degrees. Sometimes it’s amazing the difference it will make and sometimes it’s like a 2% benefit. If you can see the sky tracks you can probably see any suspects. It looks like you had a decent amount of satellites so I’m guessing there were some bad ones low on the horizon?
2 Likes
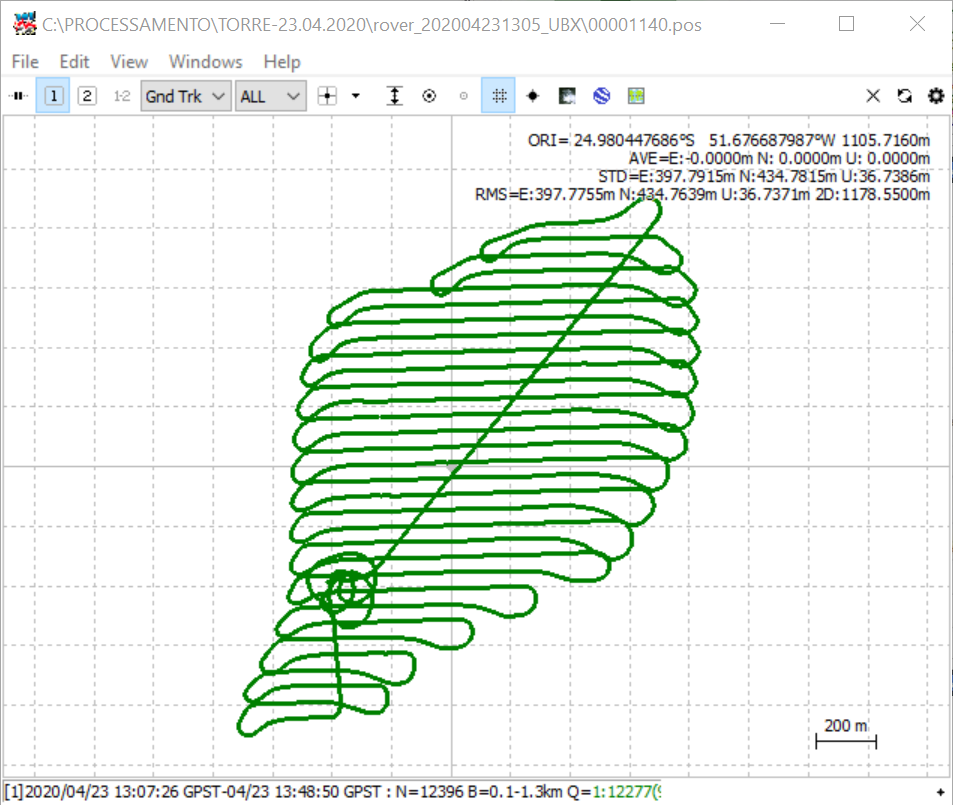
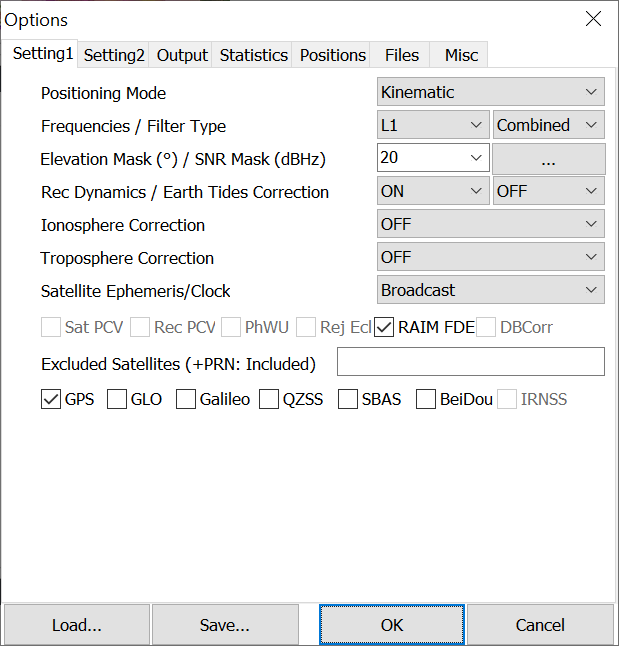
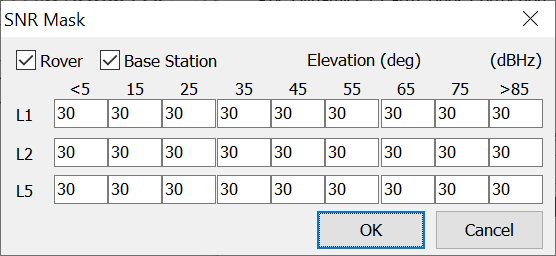
I got a 100% fix processing, I changed the elevation mask to 20 and the srn to 30.
now let’s see the results of processing in agisoft!
3 Likes
now I did the test with the active glonass and did not change
Could you try with seperate power or ferrit ring for each of them
And if that doesnt help, protect the antenna cable with rf insulating tape
1 Like
I finished processing in the metashape, and got good results
but I would like a greater accuracy on the z axis, would you have something to do?
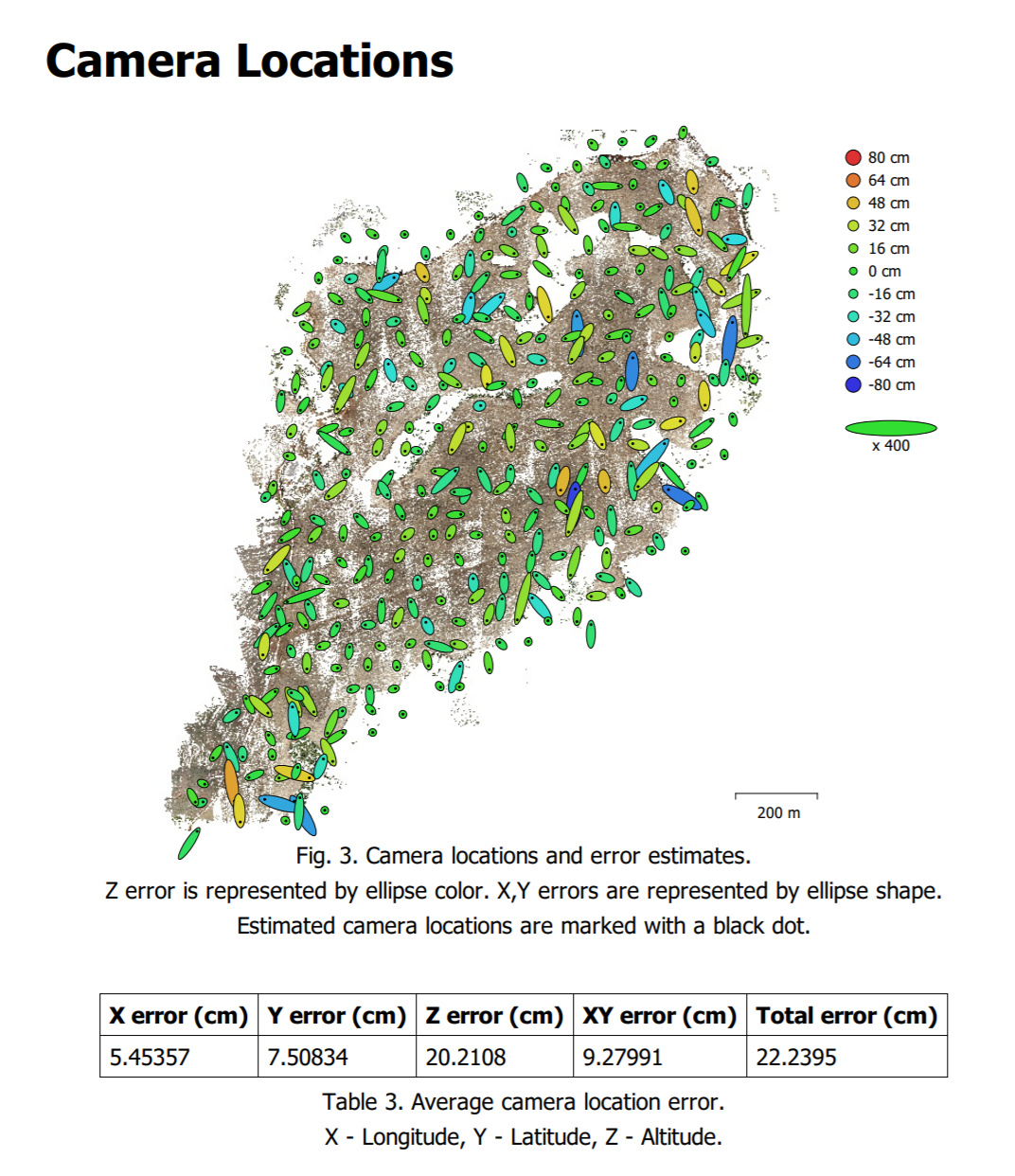
Did you use GCP’s? That is really not too far off from a camera adjustment perspective without GCP’s. I have seen adjustments without PPK are regularly up in the 2-4m range. Just to clarify, that is not the actual error in the positioning of your UAV. It requires photo alignment with much of that being camera calibration.
What UAV and camera? Do you get a focal point error value in your reports?
All that said my experience is mostly with DroneDeploy and SimActive Correlator 3D and all processing algorithms are just a little different.
I’m without GCP’S, the UAV is self-assembling, sony A6000 camera with 16mm fixed lens, follow my processing report.
relatorio.pdf (513.2 KB)
If I am understanding their report correctly the values look good as numbers, but that has more to do with the stability of the focus/focal point than the placement. It looks like the calculated value is off quite a bit from the actual center of the frame. How is your focus set? Single point, matrix?
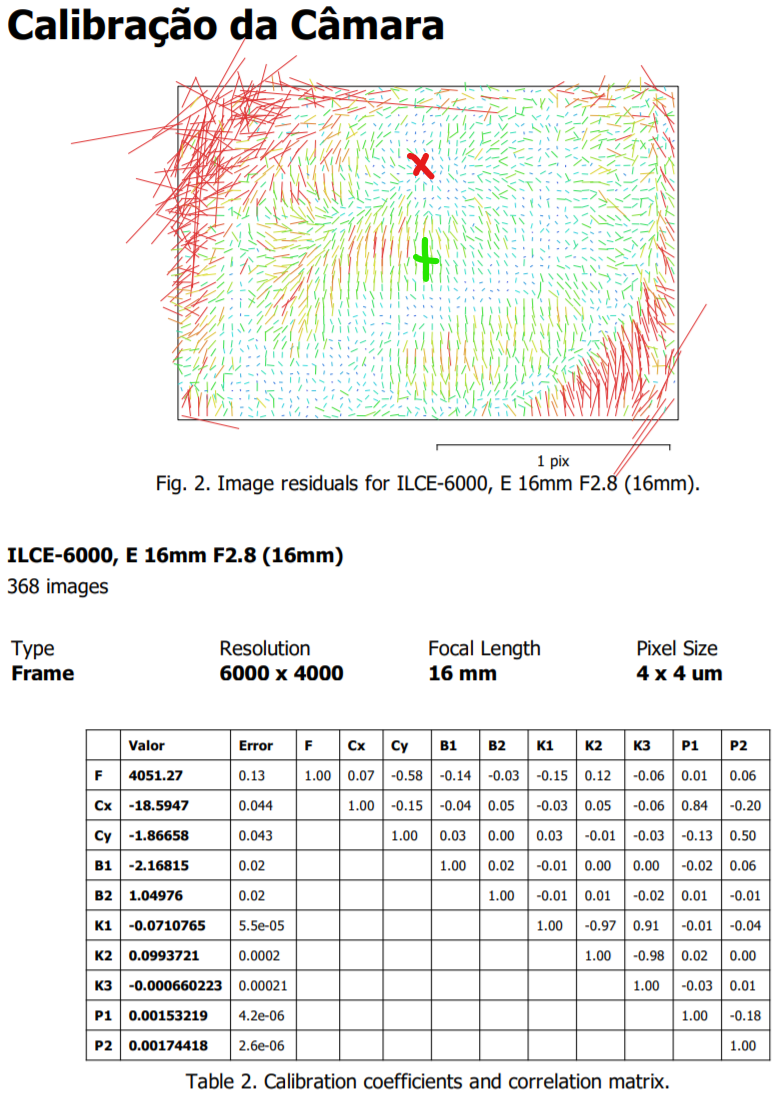
Also, the 16mm FOV is probably around 80-85 degress which is at the upper range of mapping cameras. That makes calibration important so make sure that Metashape has the camera profile for adjustment.
2 Likes
Maybe look into this?
Being that we are at a fairly high altitude we are very close to infinity so it won’t matter a whole lot, but somewhere to get started. I still think it is worth looking at or trying a different focus meter as it may be focus at the top of the frame due to the nature of drone mapping. I have always wished we had the capability to set a center, top-third focal point for mapping and a bottom-third for 360 panos at the horizon shots.
1 Like
OK I’ll take a look
Hopefully manual focus set to the same distance for the duration of the flight(s)? Changing focus also changes focal-length, so it changes the calibration. Many times the changing focus also changes the distortion of the lens.
This is only relevant for DSLR’s, where the sensor and the focus-sensor can be offset in distance.
For a mirrorless camera, the camera uses the image-sensor for focusing, so it is naturally in exactly the same plane.
for a 16 mm with an APS-C sized sensor, it won’t really matter if you focus at 10 meters or at 125 meters. Infinity would like hit at 30x the focal length, so under a meter, especially at usable aperture-values like f/4-5.6.
What matters is that the focus distance is constant throughout the flights, especially if working with a pre-calibrated setup.
Changing to the SNR filter to 30 is dangerous. Usually it is said that signal-to-noise-ratio should be over 40 to be reliable, but 35 would usually do.
2 Likes
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.