My name is Mikhail, I’m newbie here and i have just ordered NAVIO2. I hope it will be a good solution for my home UAV project. At first, i want to describe my project in few words, maybe some one here will found it interesting or will give me some advises.
My goal is to write my own software stack for drones, not based on APM/ArduPilot or PX4. I wish to create tiny, but flexible solution based on ROS or another node-based framework, where all source code will separated on nodes. These nodes can used as part of onboard autopilot software, ground control station software, in different emulators and tests software. But i don’t want to “reinvent a bicycle”, i am looking forward common solutions like MAVLink, UAVCAN and mavros. I need some help, to aim me and understand, will my project be helpful to anyone?
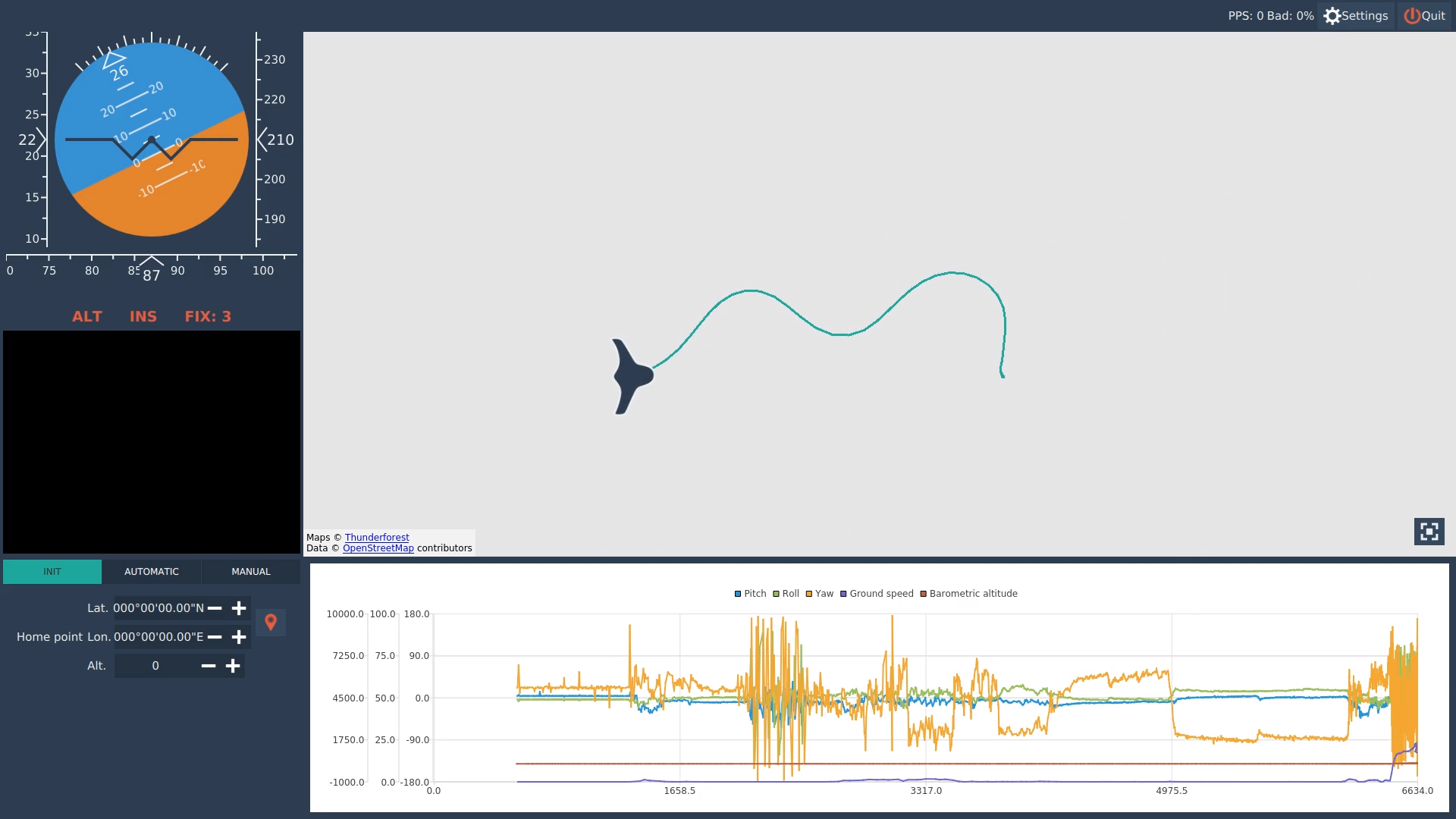
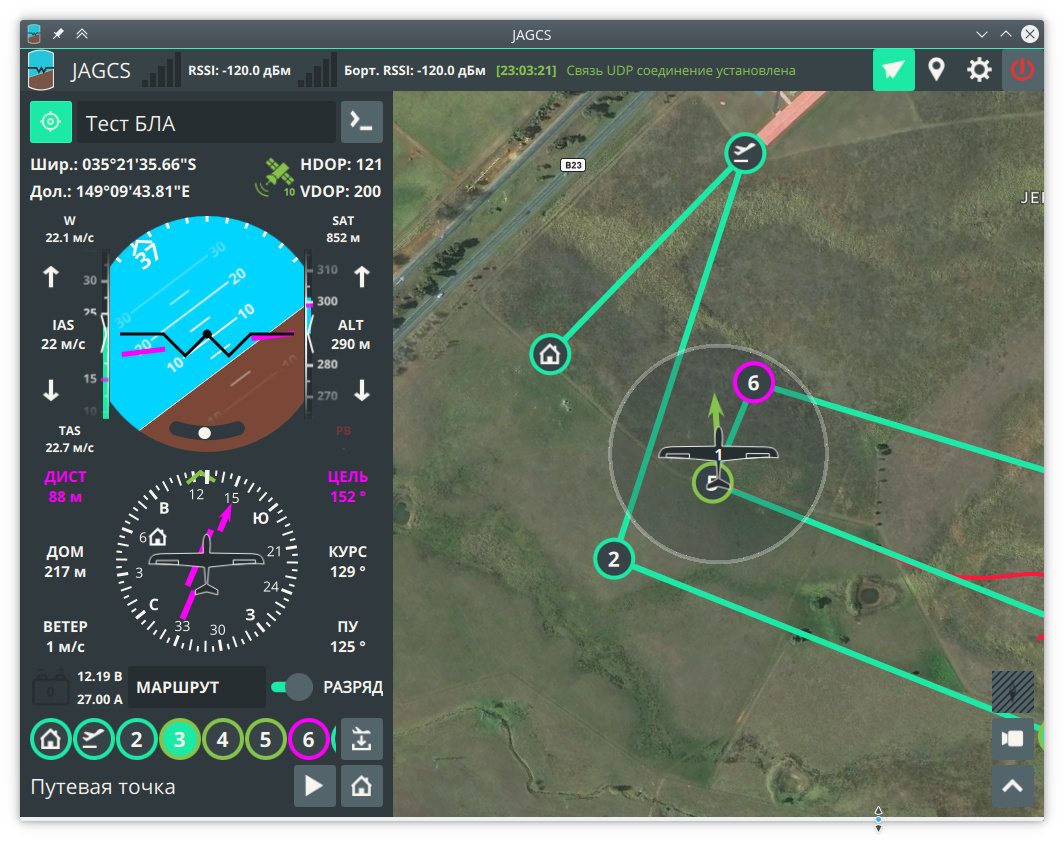
My ground station’s GUI, here video of this flight
Today, i have already done some experiments. I use Skywalker X8 with BeagleBone Black onboard running my software BBB_Wing. Proof-of-concept worked, but i understood, that i was not familiar with common solutions and now i want to integrate my idea with them.
Hi everyone! I had no free time durning last year, but i’m continue my work now. I have new github repository here and i have just finished pre-alpha build of GCS software. It can be used with NAVIO2 APM or with any other MAVLink-based autopilot. If you have interest in this solution, fell free to reqest some features.
I’m still focused on GCS and have just ended second beta. It has enough functionality to plan the mission and control the flight with fixed wing aircraft driven by any MAVLink compatible autopilot, like NAVIO with APM. My second milestone is to improve survey missions planning and target equipment control. Have anyone tried raspberry pie for aerial photography?
Been having similar thoughts. I have not been diving into any technicals yet or built my drone (bumped into some electrical problems), my spontaneous first thought was to write a “wrapper” upon mavproxy or something similar.
To implement the protocol and stuff like that just doesn’t seem to be areas of improvement.
But never the less, interesting project. Would really love to read what lessons learned you have so far.