



I’m working with a RS2 rover and RS2+ base in mangrove forests. I am not able to get a FIX signal due canopy (I only collected SINGLE signals), but it is really important for my research that I can get precise elevation data. Last week I conducted a pilot fieldwork test, and with the rover at the water level I got elevation of -7 meters. The coordinates are correct, only the elevation is obvious wrong. I’d like to know if there is any way to correct the collected elevation data.
I just made the same response in another thread:
If you are comfortable with posting log-files publicly, you could upload a set of log files here and maybe someone will take a look at them and offer comments or find find some clues within them.
I work in a rainforest and getting good GPS data is not really feasible under tree canopy.
Fix vs single doesn’t really mean anything in GNSS, these are terms Emlid uses to indicate whether the software thinks it has a good position or not. ROCK uses “fix” to mean 4 satellites. Collect your data and postprocess it later using your log files from both the base and rover.
One thing that has been done for decades is to average your readings. If you leave the device logging for a few hours, you can then put the data into ArcGIS with a lot of work and calculate an average. The reason it takes a lot of work is that Emlid Studio can’t export a Shapefile.
Gabriel,
I agree with Ceith, please share your logs so we can take a look at them. You can send this information privately to support@emlid.com.
Gabriel,
You are in good hands if you can send a file through to Emlid support and get some expert advice. In the meantime a few things to consider for your work:
- GNSS vertical accuracy is typically going be around 1.5 times worse than for horizontal. The vertical geometry is effected by the earth under your feet blocking the satellites on the other side, that’s just the way it is.
- Under canopy, longer observations may help (signal reception is broken and needs to reestablish and reconverge the solution, dilute effects of multipath etc.).
- If you can’t get Fixed results then Float is second best as it’s still a carrier solution and should be much better than the autonomous single result you are getting.
- The geoid-ellipsoid separation in some area’s can be multiple meters above or below. E.g. It’s possible the ellipsiod you are recording against could well be below the mud you are squelching through. There are calculators online to check the separation at your coordinates. If vertical is important then it would be worthwhile to better understand this, and also the vertical datums for your area so you can report out in local height standards.
- If all else fails then consider using an accurate barometric altimeter. You can establish control points in clear areas where you can get fixed results and use a high-resolution altimeter to note the altitude differences between there and your data points under the canopy and manually adjust later. A bit of extra work but even a watch or a Garmin handheld altimeter will give more granularity than 7m.
Cheers
1 Like
Complete nonsense, these are standard GNSS industry terms that have been around since carrier phase positioning. Every company, government body, education institute, scientist and individual uses them. Well maybe except one.
A fixed result means the carrier wave ambiguity has been resolved. Simply put the actual number of wavelengths between the satellites and rover has been established so that distance is known, and the phase gives the fractional distance within the final wavelength.
Single means a basic autonomous CA code measurement.
3 Likes
Can you link to a document that defines “fix” like you’ve stated? Because I can find numerous definitions that are all different. Here are some examples:
http://www.ae.utexas.edu/courses/ase389p7/projects/svatek/commands/GGA.html
Per your definition, wouldn’t “fix” include positions without differential correction? Yet if you don’t have base station data for PPK or RTK, Emlid software won’t display any solutions as “fix”.
BWAAAAHAHAHAHA!!! ![]()
![]()
![]()
There are so many different contexts for “fix.”
In navigation, a fix means you have enough data to triangulate a position and have calculated it.
(it could be as simple as aligning to two landmarks and being able to recognize and point to your position on a paper map)
In GPS context, it has the same kind of meaning (can see at least 3 satellites and pick up their code-phase data, which is enough to get a horizontal position; a fourth satellite resolves the elevation ambiguity).
…there may be more to include here such as SBAS, or PPP fix…
And then we have the GNSS-RTK fix which is really the thing that we talk about these days. Carrier-phase ambiguities resolved and using multiple satellite constellations, etc…
2 Likes
The original question in the thread was in the context of processing results regarding the “Fix” (on the plot screen) = “Fixed” versus “Single” solutions.
Emlid Studio is built around RTKLIB, and the association is clear in this extract from the manual:
The manual is here https://www.rtklib.com/prog/manual_2.4.2.pdf and if you look there are numerous associations of “Fixed” and “integer ambiguity resolution”.
Broadening a quick random search here’s an example from the biggest, Trimble:
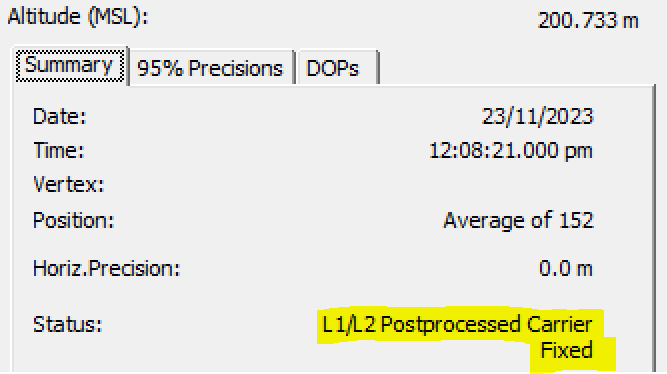
This particular legacy product led the industry and has been the same for decades.
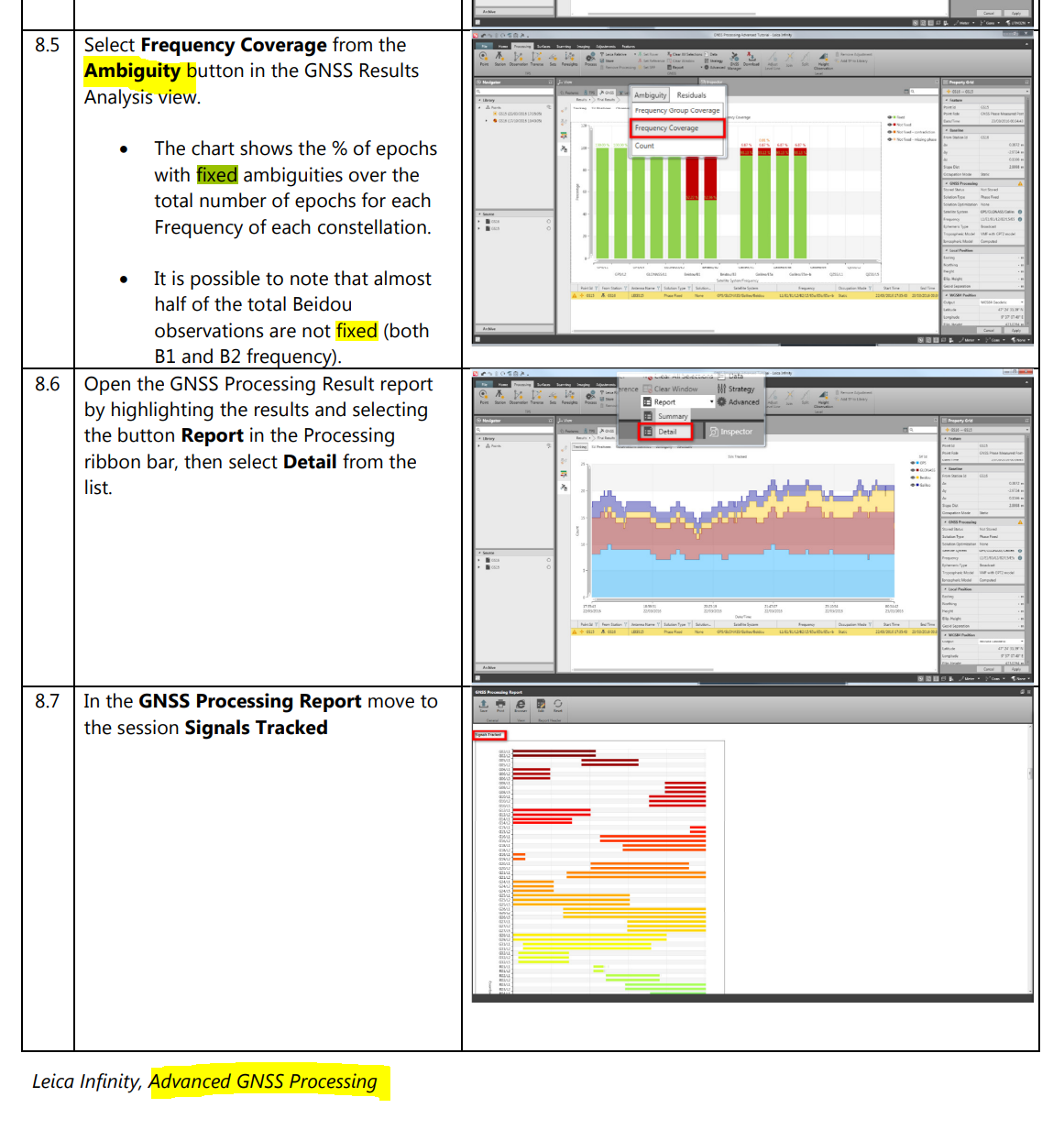
And another example from a Leica Advanced GNSS Processing manual: https://leica-geosystems.com/-/media/539597242bfa46b99d1366acae90d133.ashx
Extract:
And Novatel definitions:
Glossary of Terms | NovAtel
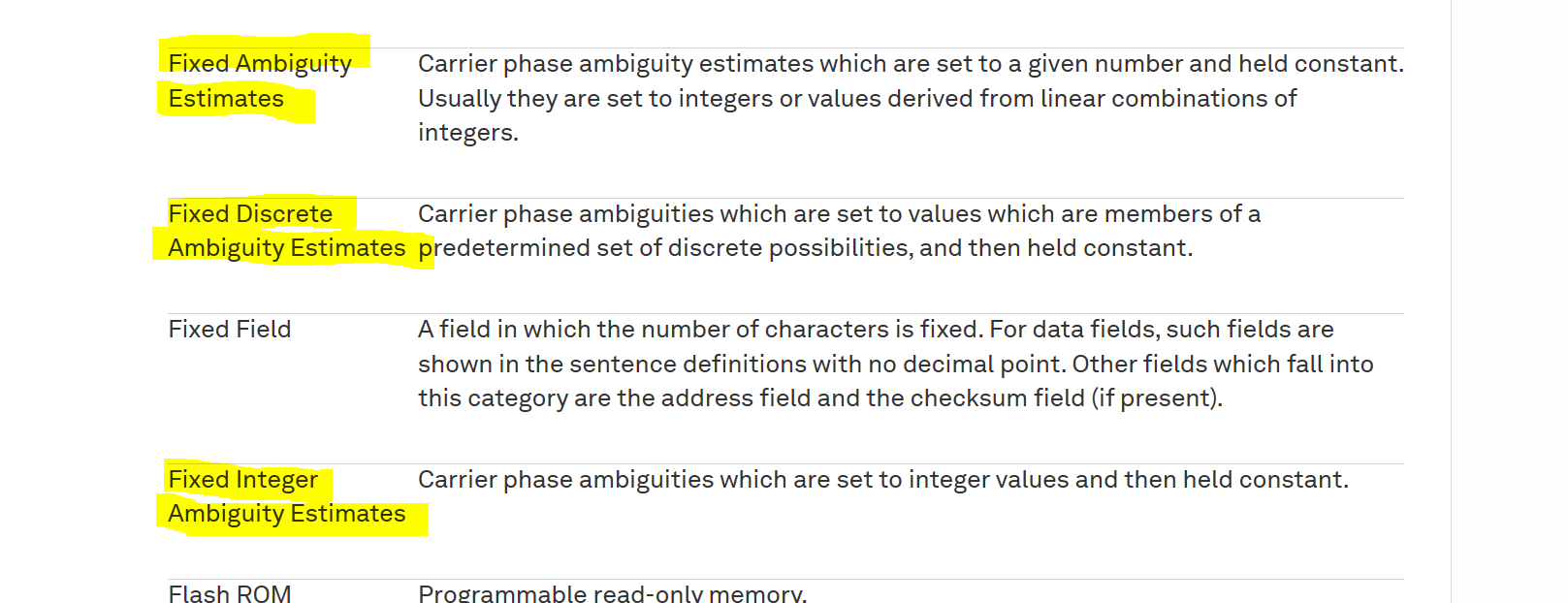
And so the list goes on…
1 Like
Very comprehensive.
How does differential correction factor into the terminology as used by Trimble and Leica?
On the Trimble GeoXT units, “fix” doesn’t depend on differential correction.
How on earth did you come to that conclusion? It’s incorrect.
If you could be more specific about which model GeoXT you are referring to, and which one of the device and office software options being used I could provide a more specific answer.
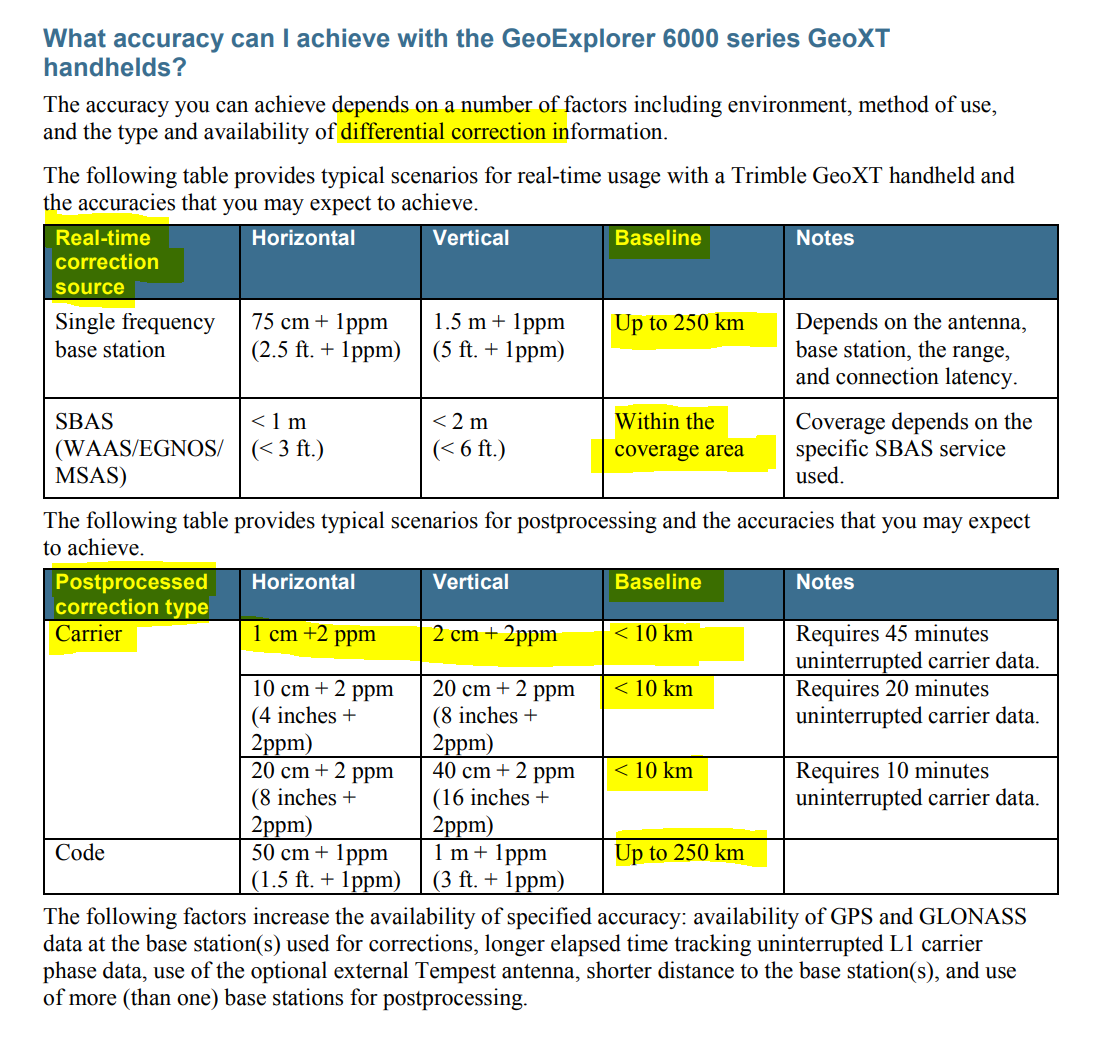
But as a general answer, they are still GNSS receivers and even the last iteration GeoXT 6000 (the XT being mid-range) could only achieve a carrier fixed result (1cm) after differential post processing at least 45 minutes of uninterrupted carrier data.
In fact, in the Trimble customer FAQ document ALL the accuracies quoted are differential :
I’ve had a number of more accurate GeoXH units and still have a Geo7X cm edition and ALL require differential - either RTK or Post-Processing - to obtain a fixed cm result.
Same as the rest of the GNSS world
1 Like
It’s a Trimble Geo7X with decimeter licensing. I think you’re close to getting my point.
The Geo7X running Trimble software says “fix” when it determines you have a certain level of accuracy or signal quality, when you’re in the field collecting GPS data with no RTK.
Yes it’s not what you describe as “fix” which exactly my point, your definition and Emlid’s definition are not universal!
https://help.trimblegeospatial.com/TrimbleAccess/latest/en/Glossary.htm
Here are the definitions that include “fix”


You didn’t answer the question, which Trimble software? There are a number of different device software applications. Suggest posting a screenshot to substantiate as your shoot from the hip statements don’t make any sense. And this coming after stating it was a GeoXT, but now it’s a Geo7X. So be specific and check facts first.
TerraSync certainly doesn’t say anything of the kind, and if it’s not a cm edition you won’t be running Access (survey). So you may be running ESRI ArcPad software with the Trimble GPScorrect extension or Trimble Positions.
Either way as per my previous post the device itself won’t and can’t possibly be confirming fixed / cm / integer ambiguity resolved without differential. And definitely not in any way if it’s only a decimeter version.
You are confusing yourself and probably others here with the generic word “fix” versus claims about a “fixed” solution. All the definitions are consistent, including the extra one from Trimble you just posted yourself.
2 Likes
I went through all the menus on the Trimble this week and couldn’t find it. I could have sworn one of the GNSS status screens showed “fix”. Maybe I was thinking of a Garmin