



Hello,
I’m using Navio2 with RPi4 to control an x configured quadcopter.
I want to ask what’s the correct way of connecting ESCs to Navio2. Should I connect all 4 BECs output or only one ?
The reason I’m asking this because on the documentation in the following link:
https://docs.emlid.com/navio2/hardware-setup/#escs
it says only one BEC output should be connected otherwise they will heat each other.
However in the following link:
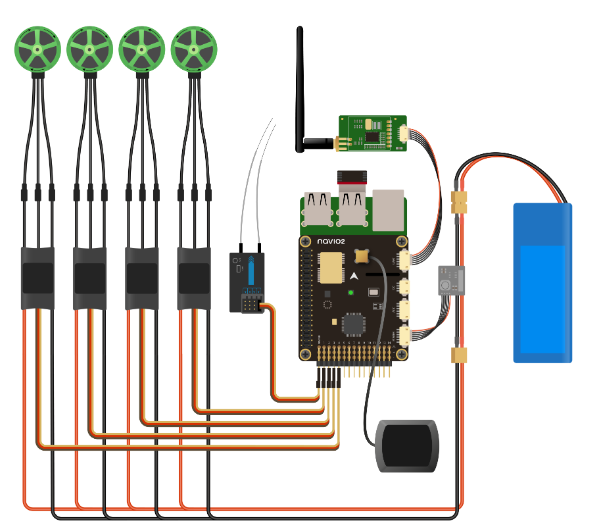
https://docs.emlid.com/navio2/ardupilot/typical-setup-schemes
I can see all 4 BEC outputs are connected.
So which one is correct ?
Thank you.
