Hello, I have configured my Rpi4 using the emlid documentation (Installation and running | Navio2).
I am stuck on the link between Ardupilot Mission Planner and the Navio2.
I am using window 10, emlid-raspbian-20220608 image and Mission planner 1.3.81.
I connect to the Rpi4 using PuTTY software and SSH connection on the 22 port.
Connection to Rpi4 through SSH is working fine.
In the Rpi4 after entered the command " sudo nano /etc/default/arducopter"
I changed the line TELEM1 like this
TELEM1=“-A UDP:192.0.0.0:14550” with the IP adress of my laptop.
I saved it using ctrl+X and Y and I rebooted the card.
Then in Mission planner I select UDP, press connect and when asked “Enter Local port” I enter “22”.
The window Connecting to Mavlink is then stuck on a loop.
You need to use the port from the configuration file. It should be 14550.
If it does not work, you can try using another port since the port 14550 might be occupied. You need to use the same port both in the configuration file and during the connection to Mission Planner.
I have updated the card and I can connect to ardupilot but in the correct way I think.
Here is how I do it :
cd arducopter
sudo /home/pi/ardupilot/build/navio2/bin/arducopter -A udp:<IP_OF_MY_ PC>:14550
Then when I open Mission planner it connects automatically on UDP14550-1-QUADROTOR. I have access to telemetry info and can caliber the accel and compass.
If I disconnect to dowload the firmware (which also doesnt’t work : Failed to detect port to upload to (Unkwon VID/PID or Board String)).
I can’t reconnect through mission planner.
I also try to plug a usb cable on the Rpi4 and an ethernet cable but my PC doesn’t seem to recognized the board.
Here are my latest avancement on this projet :
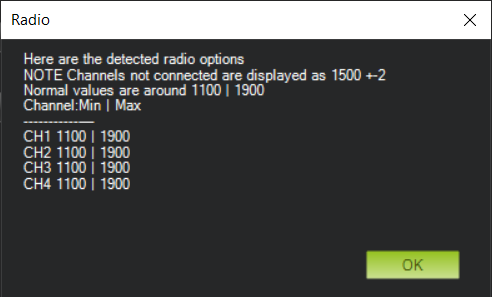
I have done the compass calibration again but I don’t know if I made it correctly as when I reboot the board and reconnect in mission planner(ver 1.3.81) there is no change on the tab.
I struggle to calibrate it as when I disconnect the battery and reconnect it I have to reconnect through ssh to mission planner to get controller info, in this case max throttle. Am I doing something in the wrong order ?